



关于情景意识的系统观点Ⅰ:概念框架、建模与定量测量
Alex Kirlik
Richard Strauss
摘要
近年来,情景意识(SA)已经得到来自人为因素研究人员的很多关注。固有的情景意识需要系统观点,因为它涉及人类认知与外部环境之间的适应耦合。因此,我们提出一个SA建模方法,该方法在界面中介和不确定判断领域内对一个人类-环境系统的认知和外部元素都给予同等重视。该模型允许将这些环境下的SA分解为7个可度量的要素。重要的是,我们讨论模型和测度如何映射,因而补充SA理论(如Endsley)、人-机自动化交互理论(如Parasuraman,Sheridan和Wickens)和自然主义决策理论(如Klein)。一篇同类的文章介绍了这种建模和测量方法效用的首次实证评估。我们的中心目标是改进理论和情景意识测量以支持设计和训练干预。
1 前言
最近,情景意识(SA)已经得到了人为因素和认知工程研究人员的诸多关注(例如,Adams,Tenney和Pew,1995年;Durso和Gronlund,1999;Endsley和Garland,2001年;Wickens,2002)。这并不奇怪,因为现代工作场所中信息技术和自动化日益剧增地在人(或团队)与工作环境之间调节其相互作用,构成了工作和操作的目标。虽然这种现象有许多方面,其作用取决于环境和任务的具体细节,但大多数人都赞同深入理解和支持SA的持续科学进步一定要依赖于测量的改进。Salas、Prince、Baker和Srestha(1995)恰当地总结了这种形势:“理解情景意识的主要问题是缺乏先进的测量工具”。
本文,我们的目的是介绍用于建模和测量一种现象的技术。我们认为该现象是人为因素工作者感兴趣的广泛任务环境中SA问题的关键:在一个由技术界面中介调节的不确定条件下人的判断(例如,一个远程系统、情况或环境的显示)。这些评判可能涉及过去、现在或未来的情况或事件,并以使用本处的或最接近的信息源(如界面显示器上出现的那些)为基础,以此来推断在遥远、偏僻任务环境中出现的形势、状况或事件的存在形式。
理论背景与目的
我们提出的方法有一个系统,或生态定向,其意图是同时抓住SA的认知和环境(操作者外部)这两个决定因素。虽然大多数的SA研究集中在前者,我们同意Pew(1995年)指出的“为了适当定义SA,我们需要了解我们所说的‘情景'是什么意思,并且也需要知道我们必须知道的这种‘情景'是关于什么的”(第7页)。与此观点相一致的,我们提出的方法是设想,必须像这样的将SA作为人类认知和外部情景之间的一种关系来定义、建模和测量。
我们提出的测量技术是以心理学研究、建模的悠久历史和从最近的气象预报文献借来的最新技术为基础的,这些技术对人为因素而言稍微有点新,但是对SA的研究而言无疑是新的。我们建立了一个界面调节的SA判断方面的模型,来自于:Brunswik(1956)的累积研究,他提出了判断的透镜模型;Hursch、Hammond以及Hursch(1964)与Tucker(1964)的研究,给出了Brunswik模型的数学公式;Murphy(1988)的研究,发展了一种天气预测技能的诊断方法;Stewart(1990)的研究,将透镜模型方程与Murphy的技能测度紧密结合;最后,Stewart和Lusk(1994)的研究,通过描述感知的贡献和建立界面调节判断模型而产生的信息加工技术补充了先前的研究。
这篇文章中,我们提出这些系统定向、生态的技术,希望以此推进情景意识测量和支持研究。重要的是,我们还提供了这些方法是如何连接、补充SA(例如,Endsley,1995a,1995 b)、自然决策或NDM(如,Klein,1999)和人—自动化互动(Parasuraman、Sheridan和Wickens,2000)相关理论的信息。
2 SA:认知与生态学方法
正如这个词本身表明的,情景意识是一种相关的结构,所要求的研究不仅是认知的贡献(例如,感知,记忆,知识等),而且如前面章节里Pew评论中所强调的一样,也包括环境的贡献。不确定的环境清楚地说明了这一点,因为环境的可预测性在SA理论可能的范围内加上了一种约束。如果一个人的任务保持对一间上锁的房间重复地抛掷的一枚硬币的SA,这个人在外面,SA的上限(平均)将会是一半。这可以在考虑任何心理问题之前了解到。在这种情况下,环境有不可减化的不确定性,并且这种不确定性为SA设定了一个上限。
2.1 关于SA的构想:意识观点
尽管有上述观察,可以公平地说,对SA意识(认知)方面的关注比其环境方面的关注更多。Endsley已经是该方向研究的一名倡导者,她已经在自动化(Endsley,1996)、空中交通管制(Endsley和Smolensky,1998)和自然决策(Endsley,1997)等等环境中研究了SA。通俗地说,她注意到,SA关系到“知道什么将继续下去”(Endsley,1995b,第36页)。更确切地说,她把SA定义为“对一定时间和空间范围内环境要素的感知,对其意义的理解,以及对不久的将来他们状况的预测”(Endsley,1995b,第36页)。
上述定义把SA描述为由感知、理解和预测元素组成的三个层次概念。Endsley把等级1的SA描述为由环境中分离“要素”感知而形成的知识,其中要素可以是环境中的物体也可以是属性。等级2的SA,这可以形象化为一副心理图画,描述对情况的一种理解,或者是对它的现实意义的认识。等级3的SA被描述为预测等级1要素未来状况的能力。
和Endsley一样,其他研究人员已经大量侧重于意识或SA的认知方面,因此,把SA定义为一种心理图画或一种内部产物。例如,在地面导航的环境中,Wesler、Marshak和Glumm(1998)把SA与短时记忆的内容相等同。在航空领域,Gibson和Garrett(1990)把SA描述为对情景的一种Gestalt式的了解,而Taylor(1990)则把SA描述为一个“现实的真实模型”。
2.2 关于SA的构想:生态学观点
其他研究人员已提出了更加系统的定向,SA的生态学定义。例如,Flach(1995)指出,“SA依据对人与环境之间适应耦合的理解定义人的表现问题”。他介绍了相应性概念以此来强调“人的意识必须符合情景的客观约束”。Smith和Hancock(1995)也提出了一种生态学观点,基于Neisser(1996)的知觉周期理论来形成他们的定义。在他们的建议中,Smith和Hancock重点详细阐述了SA的环境构成部分。他们用Gibson(1979)的“不变量”理念来表示有意义的环境特征或为了获得SA人们必须要适应的约束。
如前所述,Pew(1995)也指向了一种关于SA的生态学观点。Pew介绍了两个定义,理想与获取的意识。他把理想意识定义为在所有已知信息和知识要求都满足之后的潜在认识。然后,他把获取意识定义为在考虑到知识和信息的局限性之后潜在理想意识的等级。回到我们的硬币抛掷例子,假设一个硬币在本人在场的情况下抛掷,他询问自己关于结果的“意识”。在这种情况下,理想和获取意识都将达到最大化,至少对观察结果的视觉能力和报告结果的语言能力。
但是,如果硬币在上锁的房间里翻转到另一面,并且,得不到任何与结果有关的相关信息,理想和获取意识将下降到二分之一。想象一下,这两个极端之间的例子:如果硬币在你面前掷,但是有一段距离,理想意识将是完美的,获取意识将取决于它的距离和你的视觉辨别能力。当你为了直接观察而走向硬币时,获取意识将上升到理想意识水平。
3 SA的建模与测量:一种系统的方法
Brunswik(1956)关于不确定性条件下判断的生态学观点,是情景意识判断部分理论模型的初步基础(Brunswikian理论和人为因素之间关系的讨论,见Kirlik,2000)。见图1,其中描绘了Brunswik判断理论的基本组成部分和界面调节的情景意识。
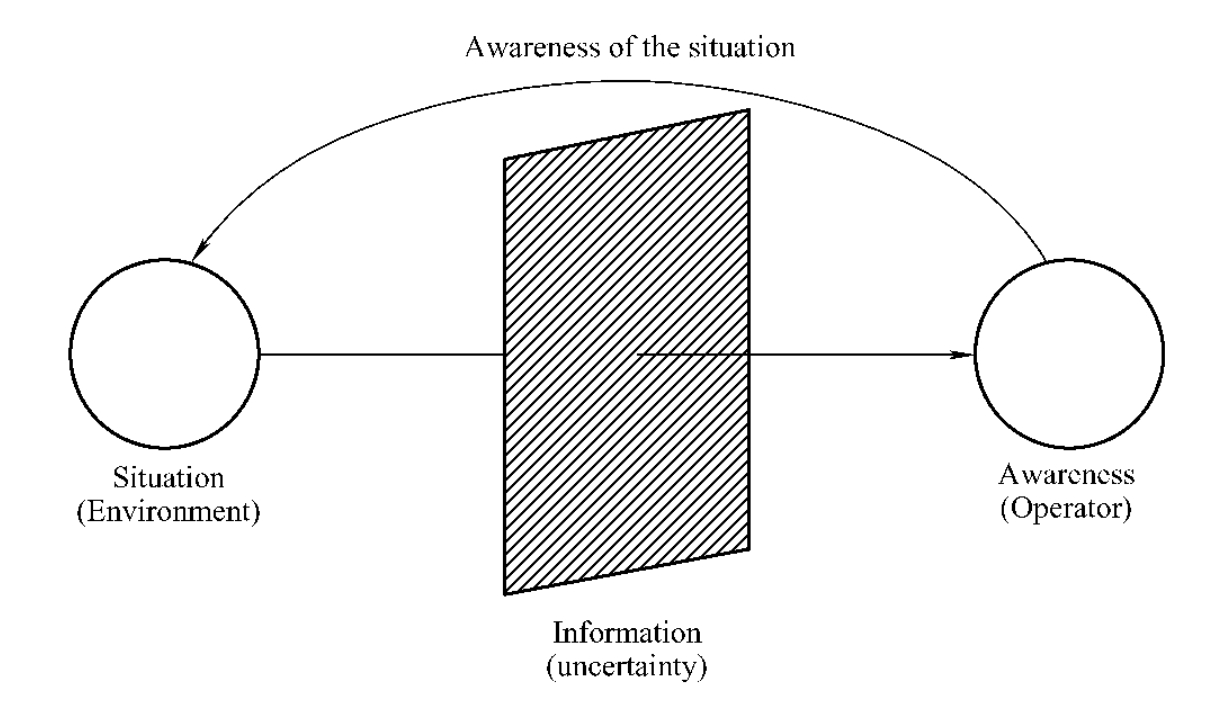
图1 Brunswik的判断或界面调节SA的一般表示
图1左侧描述情景,或者是Brunswik提到的环境,该图右边描绘意识,或者是Brunswik提到的生物体(我们用“操作者”)。界面调节情景-意识关系或通常的环境-生物体关系,都是信息和随之而来的不确定性(即能够充分描述模糊的或远处的情景或环境状况信息的程度)。Brunswik(1956)最初建议依据由线性关系或双变量相关关系测得的判断情景与实际环境状况之间的对应性来衡量判断的质量。因此,可通过操作者的判断与被判断情景真实状况的相关性得到成绩的衡量。用相关系数γYO来表示,其中下标代表操作者判断(Y)和判断的情景或“对象”(O),相关系数(0<γYO<1)越大,对应性越好,操作者的成绩就越好,并且SA也越好。
3.1 相关系数的限制
虽然相关系数提供了对应性的有效测量,但是它有限制测量敏感度的特性,因而限制在测度判断质量方面的应用(Cronbach和Gleser,1953)。相关关系只抓住了两个变量集之间的形状差异,即它们共有的上下模式,没有区别它们在数量或比例上的差异。在图2中,以图形表示出相关系数对量和比例不敏感。请注意,在所有四个图表中相关关系都是1.0。
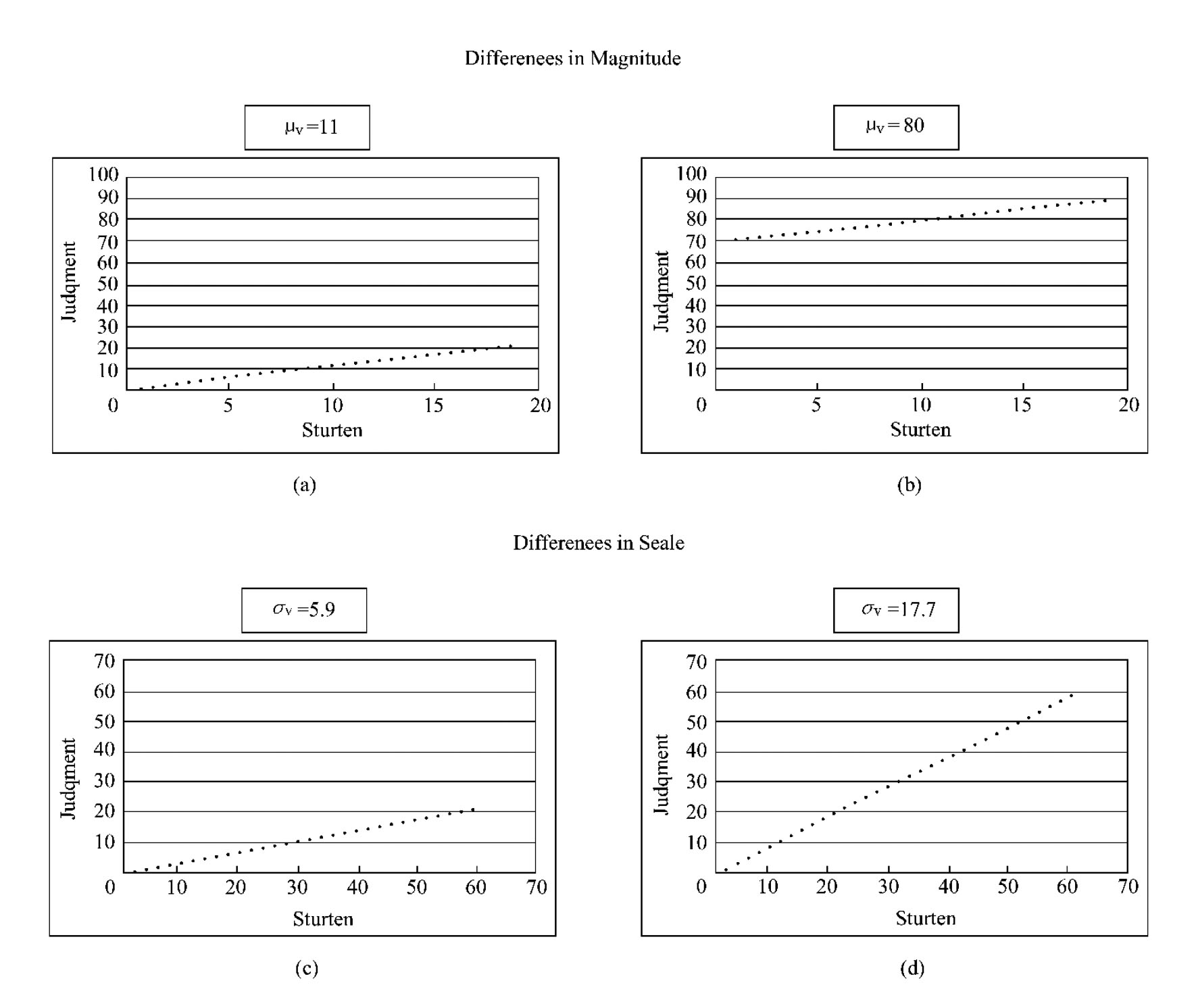
图2 相关系数对量和比例不敏感
显示数量区别的图(a)及(b)没有在相关系数上反映出来。图(a)描绘了判断(例如,预测一架正接近飞机的距离)和情景的真实状况(例如,一架正接近飞机的实际距离)之间的一种关系。在这种情况下,平均判断为11(mile)。图(b)显示了相同情况下的另一组判断,但是平均判断是80(mile)。相关性无法区分这些事例是相关性对量的差异不敏感的证据。图2中的图(c)和(d)表明线性相关不能反映比例上的差异。在图(c)中,情况的判断有一个5.9(mile)的标准偏差,而在图(d)中,标准偏差为17.7(mile),表明相关对比例差异不敏感。
3.2 判断质量的绝对距离测量
相关系数的这些缺陷促使一些研究者寻找判断相应性更加敏感的测量。一种替代方法是看看数据集之间的距离,而不是它们的共享形状,经常能在气象预报研究中发现的一种方法(例如Murphy,1988)。均方误差(MSE),两个数据集之间平方欧氏距离的测量(Cooksey,1996),是这类用途经常采用的一种方法(如Lee和Yates,1992;Stewart和Lusk,1994)。MSE使用下面的公式来定义距离:
![]()
这里,两个数据集是操作者的判断和所判断情景的相应真实状况。这两个集合习惯上形成n对,一对中有一个元素来自于每个集合(Yi与Οi分别表示第i次判断和第i个真实状态)。当判断是对时,MSE等于零。作为相关系数的一种替代,MSE可能不值得注意,除了它可以被划分为三个可以代表形状、数量和比例的不同组成部分。在这里,我们给出Murphy(1988)建议的分解,不过先要介绍他的判断质量测度的技能评分(SS)。
3.3 作为一种判断质量测度的技能分值
为了发展Murphy对MSE的分解,Murphy(1988)使用技能的概念,把技能定义为判断超出侥幸言中的表现。可能的表现被定义为若某人总是在所判断情况的平均、基率值基础上提供相同的(不变的)判断所得到的相应性程度。在公式(2)中,本标准的质量是MSER,如果总是使用,那么就可预测到。
![]()
这里,-O是平均值,或者是所判断事件的基率。导出技能评分需要计算操作者判断的MSE(公式(1))和标准MSE(公式(2))之间的比率。然后,减去这个比率产生技能分数(SS)。这种关系如公式(3)所示。在这个基本形式中,技能评分提供了与偶然性相比的操作者判断质量的全面评估。当SS为正时,操作者的判断比机会(MSEY<MSER)更好;当它是零时,操作者的判断等于机会表现(MSER=MSEY);而当SS为负时,操作者的判断比机会更糟糕(MSEY>MSER)。
![]()
3.4 技能分值的Murphy分解(1988)
Murphy(1988)给出的SS使得MSE可以被分解。把MSEY(公式1)及MSER(公式2)的公式代入技能分值的方程(公式3),Murphy(1988)展示了如何获得所需的分解。在公式(4)中介绍了他分解的一个概念表达:
Judgment Quality(SS)=[Shape(correlation)-Scale Error-Magnitude Error] (4)
在这里,技能分值(SS)被划分成三个部分,因而形状(相关)是与量和比例差异相关的误差分开的。其结果是比单一相关性更敏感的判断方法(相关性方法只测度形状上的相似)。比例误差分量已被称为回归偏差,因为它衡量操作者是否已适合对情景变量确定了判断变量的范围。当预测从操作者的判断所观察到的事件的回归直线斜率为1.0时(Stewart和Lusk,1994),回归偏差为0。例如,有回归偏见的一个潜艇声纳专家也许判断接近敌人的平均范围是20至100nm,而实际区间是在50至80nm。一个回归偏差是在一个比实际情况不是小就是大的范围内产生判断的一种倾向。
最后,Murphy的公式(4)中的数量误差分量被称为基率偏差(Stewart,1990)。它衡量操作者判断的整体(无条件)偏差,从而诊断出高估或低估判断情景的倾向。只有当操作者的判断平均值与所判断情景的平均值相等时,这种偏差才为零(即实际基率当操作者的平均判断过高或过低时,是非零的)。
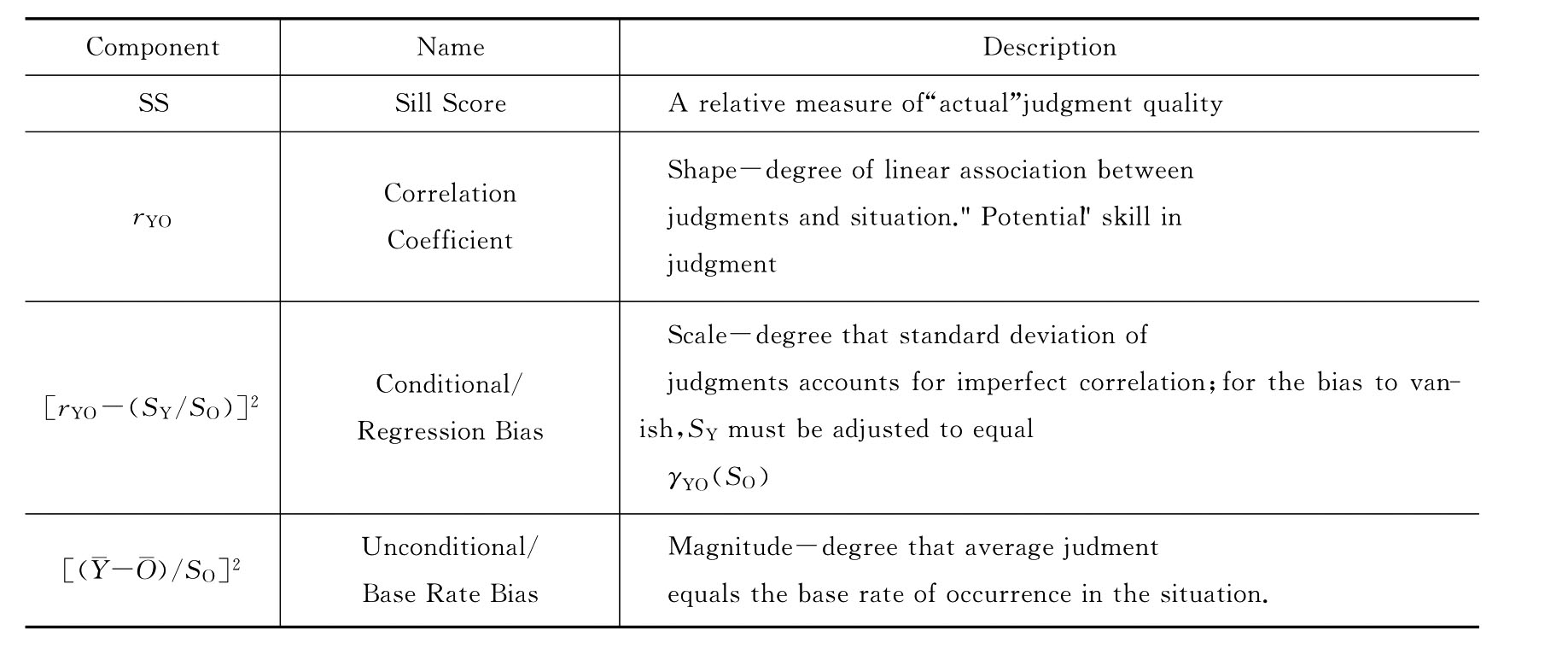
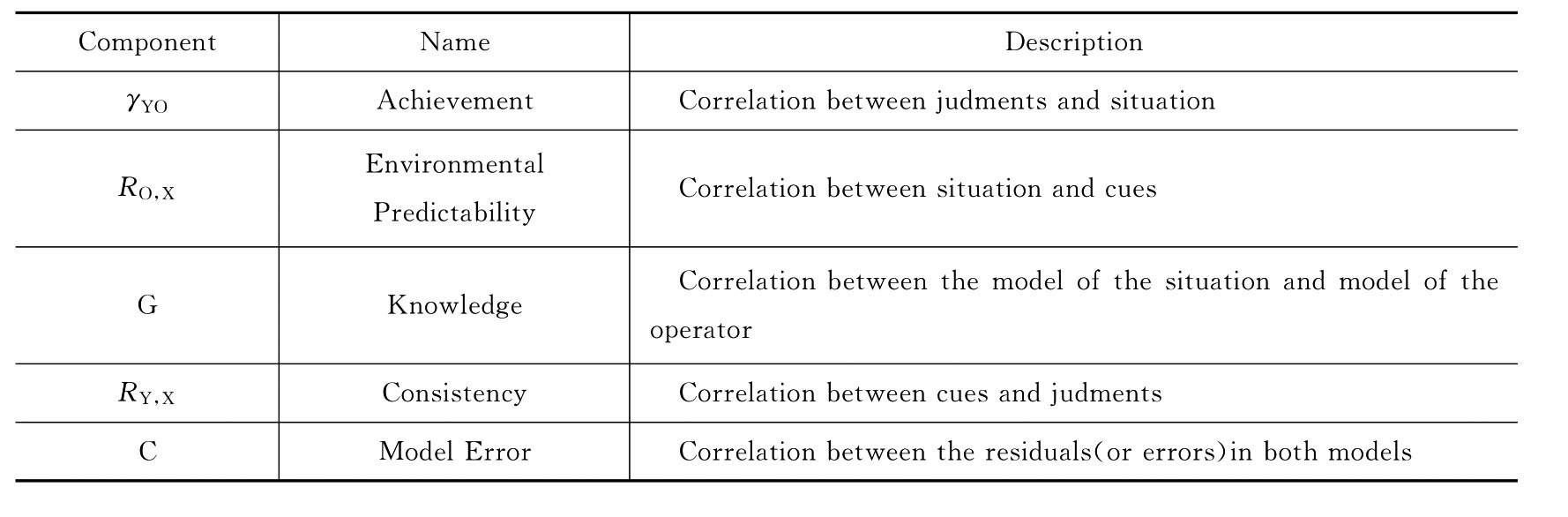
技能分值的Murphy分解提供了一种测度情景意识中判断组元的敏感方法,因为它在判断质量测度中分解了形状、等级和重要性的联合作用。精确分解的数学公式见下面的公式(5),其元素如表1所示。
![]()
表1 技能分值的Murphy分解元素
3.5 采用透镜模型方程扩展技能分值分解
γYO如公式5和表1所示的技能分值分解可以改善对SA判断元素的诊断。进一步通过分解相关系数(γYO),可以得到附加诊断。要做到这一点,考虑Brunswik透镜模型的一种更详细的描述,如图3所示。
透镜模型有如图1所示相同的构型,但是将信息描述为线索,或信息项(标记为X′iS)的可数集。回想一下,Brunswik测量的成效(图3中的顶部弧线)作为一种线性相关,对我们来说是γYO。每一个线索和情景之间的关系可以分配一个生态学效度,或一个线索关于情景提供信息的程度。此外,每个操作者所依赖的程度与线索之间的关系可以称为一个线索的利用率。通过考察这些变量之间的关系,透镜模型可以用来进一步分解Murphy的技能分值。
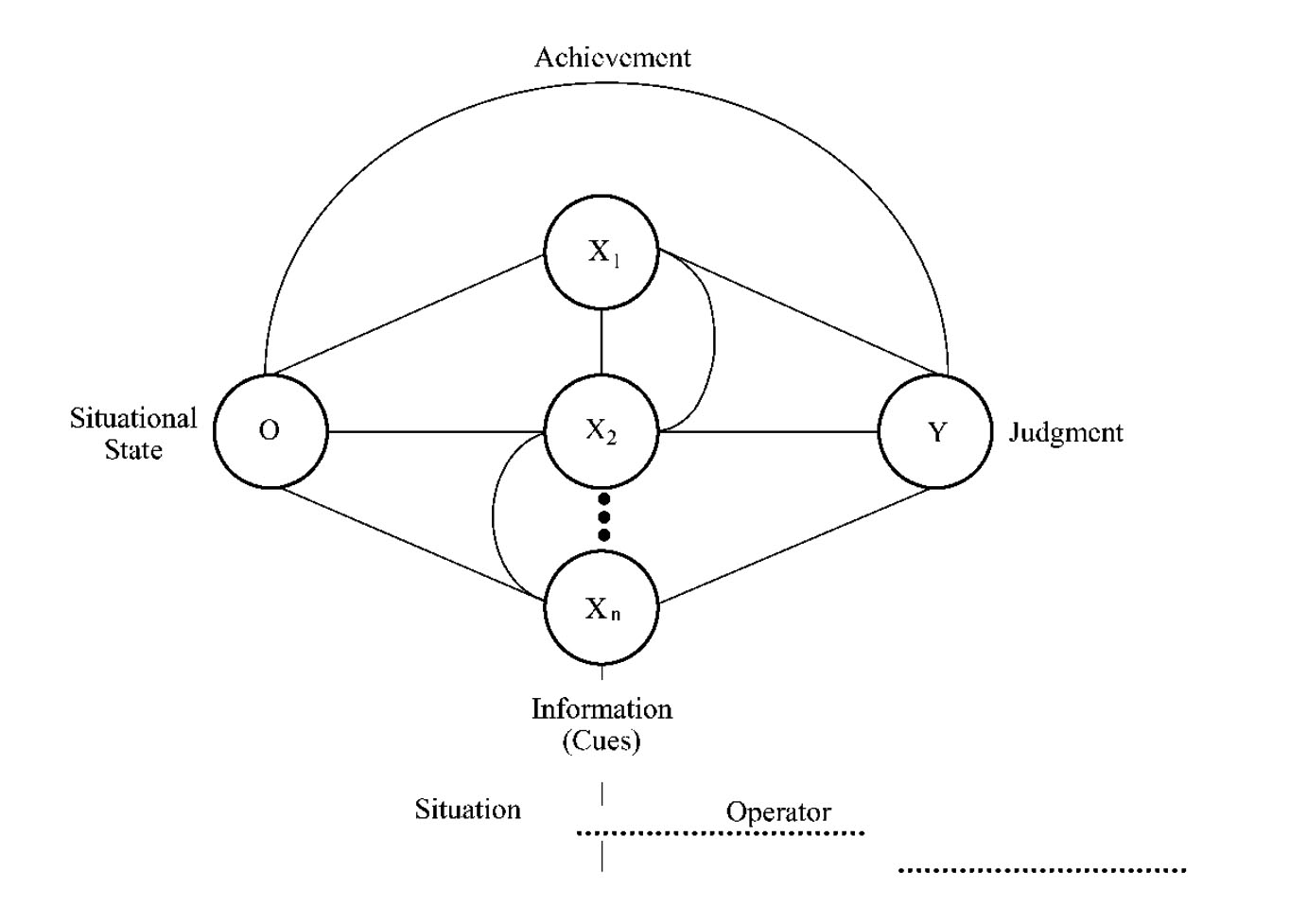
图3 Brunswik透镜模型
3.6 透镜模型方程
对Brunswik透镜模型最重要的扩展之一是发展透镜模型方程(Hursch,Hammond和Hursch,1964;Tucker,1964年)。透镜模型方程(LME)提供了透镜模型的数学表达,并且将由成果水平或γYO表达的总体相关分解为与线索的生态学效度、线索利用率、环境的可预测性以及操作者使用的判断策略(线索权重)的生态学效度的一致性有关的相关关系。
在LME的基础上有两个平行的模型,它们代表了图3显示的透镜模型的情景方面和操作者方面。这两种模型,通常使用多元线性回归模型,但这并非必需(例如,参看Rothrock和Kirlik有关此问题的讨论,印刷中,以及依据基于规则模型的替代公式)。情景模型描述线索(X′iS)与情景(O)之间的总体相应性,而操作者模型描述线索(X′iS)与操作者判断(Y)之间的总体对应性。在这两个模型的基础上,公式(6)概念性地描述了成效分解的结果。
![]()
环境可预测性(或等效的情景可预测性)是线索与情景之间的对应性。一致性是在操作者模型中所反映的操作者判断与线索之间的相应性。因此,线索和判断行为之间较低的相关性比基于了解线索的全面预测更小。
知识是情景和操作者模型输出之间的相对应程度。这些模型的输出代表情景和操作者基于它们各自与线索对应程度的可预测方面。此组件被称为知识,因为它代表着一种程度,在该程度上,操作者正确地模仿情景的规则或者适应地加权线索。公式(6)中的模型误差是情景中不可预知部分与操作者模型之间的对应程度。通常,在人类判断中发现的这个值是很小的(Brehmer,1994)。
![]()
如前所述,公式(7)显示的分解是使用多元线性回归完成的。因此,环境的可预测性、一致性、知识和模型误差均采用多重相关统计方法测度。LME的数学形式是上面的公式7,它的要素如下表2所总结的。
表2 透镜模型方程的要素
3.7 扩大的透镜模型
为了整合LME成效的分解和技能评分(SS)的Murphy分解(1988)优点,Stewart(1990年)提出了单一的方程式来表明如何将这些分解合并。在Stewart的模型中,使用LME的部分形式扩展了来自于Murphy分解SS中的γYO(见公式(7))(不包括典型可忽略的C或误差分量)。在下面的公式(8)中表示了Stewart分解的一种概念形式,并且在公式(9)中表示了它的数学形式。
公式8的前三个术语是来自γYO的LME分解。这三个方面分别换算为公式(9)中所示的前三个量。公式(8)中的最后两个项(比例误差和数量误差)仍然不变地来自于Murphy中SS的初始分解。它们转化为公式9中的最后两项:

3.8 扩展的透镜模型
当考虑公式(8)和(9)中出现的模型结构时,Stewart和Lusk(1994)认为环境的可预测性(线索和情景之间的相关性)可进一步分解为两个方面:一是从情景中提取数据的过程,二是把提取到的数据转换成操作者可用线索的过程。这两个过程代表使用界面技术的许多系统中的一种典型顺序。
例如,在潜艇中第一个过程相当于可以从水下环境中收集原始数据的传感技术。第二个过程是把这些数据转换为呈现给操作者的线索的融合和显示技术。请注意,在这个例子中,在感应器或水下环境中的噪声可以传递到原始数据,最后,它也可以传递给线索。
将环境的可预测性分解为一种两阶段的序列,从而为情景-信息关系提供一种更具诊断性的描述。此外,它可以帮助辨识减弱较高的相应程度的制约因素,如出现故障的传感器。这种“技术信息处理”的顺序在图4加以中介绍。
如图4所示,两个阶段被标记[1]和[2]。阶段[1]描述了情景中的数据或描述符(标记为T′iS)的提取。在阶段[2]中,这些描述转化为通过界面显示提供给操作者的原始线索。围绕描述符和原始线索的加厚实践圆圈表示它们作为集合的地位。请注意,这种情景和原始线索(分别为,O和X′iS)相当于在传统透镜模型中描述的情景和线索。
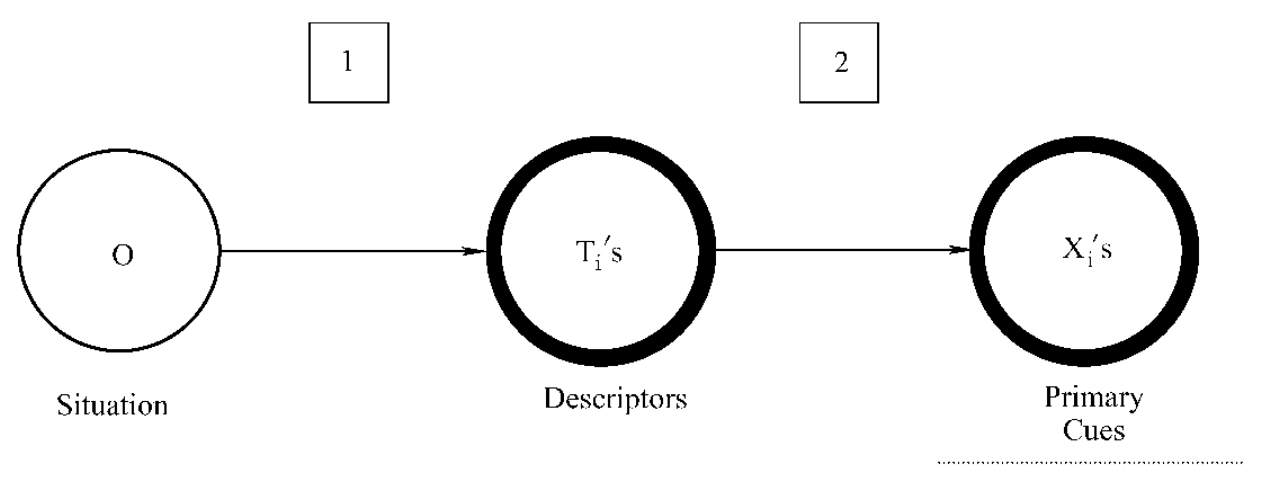
图4 技术信息处理的两阶段序列
以类似的方式,Stewart和Lusk也认可,一致性是信息(线索)和操作者判断之间相应性的一种测度,可以进一步分解成两个过程:(1)操作者用于获取信息的过程;(2)操作者用于把信息转化为一种判断的过程。类似于技术信息处理的先前顺序,在第一个过程中的错误或噪声可以传递给第二个过程并最终制约判断质量。
分解成两阶段序列的一致性增强了对信息-操作者关系描述的诊断。此外,它还可以帮助确定人类信息处理减弱较高对应程度的约束。“操作者信息处理”(IP)的两阶段序列在图5中示出。如图5所示,操作者IP的两个阶段标记为[1]和[2]。阶段[1]描述了操作者从原始线索中获取次生线索(标记为U′iS)。在阶段[2]中,这些次生线索转化为一种判断。图4和5的原始线索是相同的。
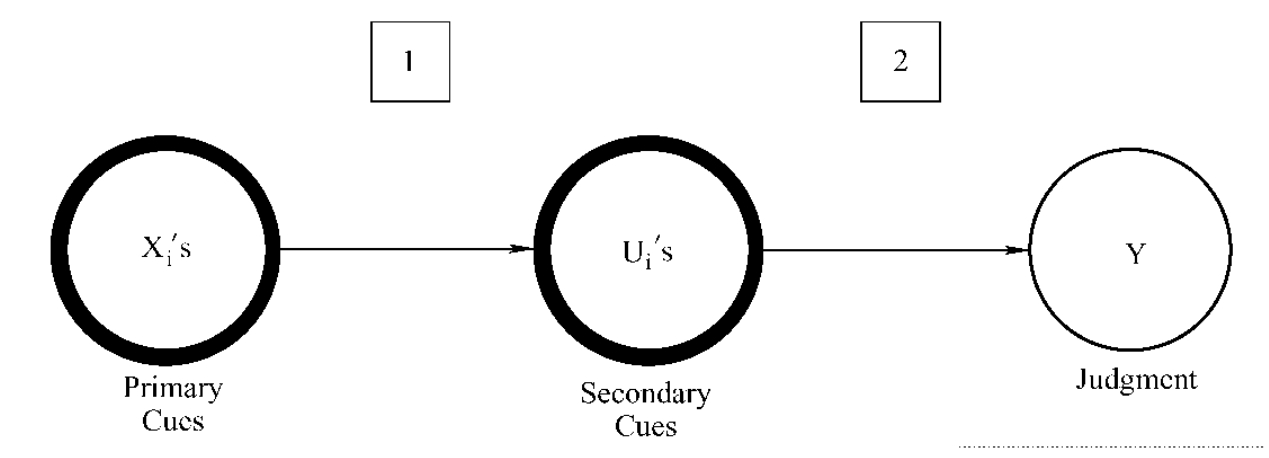
图5 操作者信息处理的两阶段序列
图5中,所示操作者IP序列对许多SA的IP模型是共通的。例如,Endsley(1995年)的三层次描述把SA表征为:(1)情景中元素的感知;(2)基于这些元素转换的情景理解;(3)这些元素未来状况的判断。当对未来状况做出判断时(例如,正接近飞机碰撞的可能性),图5中的二阶段描述映射成Endsley的第1和第3层次,其中次生线索(U′iS)映射成Endsley的层次1SA,并且操作者的判断(Y)映射成Endsley的层次3SA。层次2SA可以映射成知识测度,或任务的线索——准则关系的适应性。Endsley的定义并不包括图4描述的两阶段技术IP,因为它未覆盖整个界面调节的人-环境系统。
通过把技术上的IP和操作者的IP序列插入至透镜模型中,Stewart和Lusk(1994)给出了扩展的透镜模型(ELM)的图解形式。结果示于图6中。图6维持透镜模型的基本构型,但显示技术上的IP序列插入情景一侧,而操作者的IP也插入操作者一侧。以这种方式扩展LM引入了模型组件之间新的关系集。
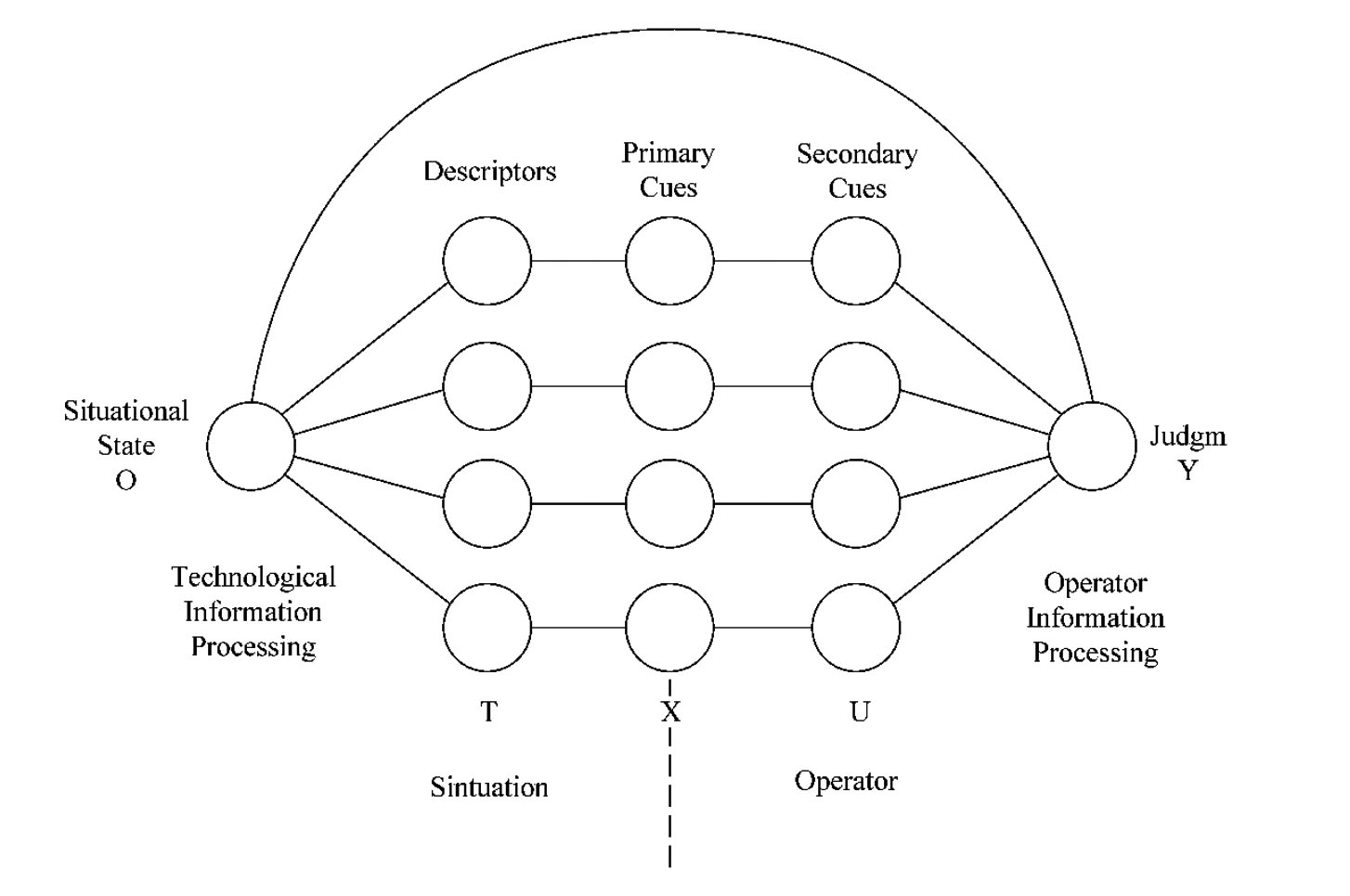
图6 扩展的透镜模型(ELM)
对于技术IP,Stewart和Lusk(1994)使用相关性来衡量两个有关的对应性:(1)情景和描述符之间;(2)情景和原始线索之间。把情景和原始线索之间的相关记为RO.X,情景和描述符之间的相关记为RO.T,Stewart和Lusk导出方程(10)。这个等式表明RO.X可以分解为RO.T乘以RO.X和RO.T的比率(记为VT.X)。
![]()
VT.X被称为信息系统的逼真度(Stewart和Lusk,1994年)。它反映描述相对于情景的变化比例,这一比例保持在原始线索中。例如,有能把传感信息完美地转变为显示给操作者线索的显示技术的潜艇可能具有很高的逼真度(即,VT.X等于1,因此RO.X将等于RO.T)。请注意,这些情况并不能保证任务环境是完全可预测的,也就是说,RO.T仍然低于1(例如,水下环境内在可能是嘈杂的)。
![]()
类似地处理操作员信息过程(见公式(11)),Stewart和Lusk扩展的透镜模型的完整数学形式如公式(12)所示。
![]()
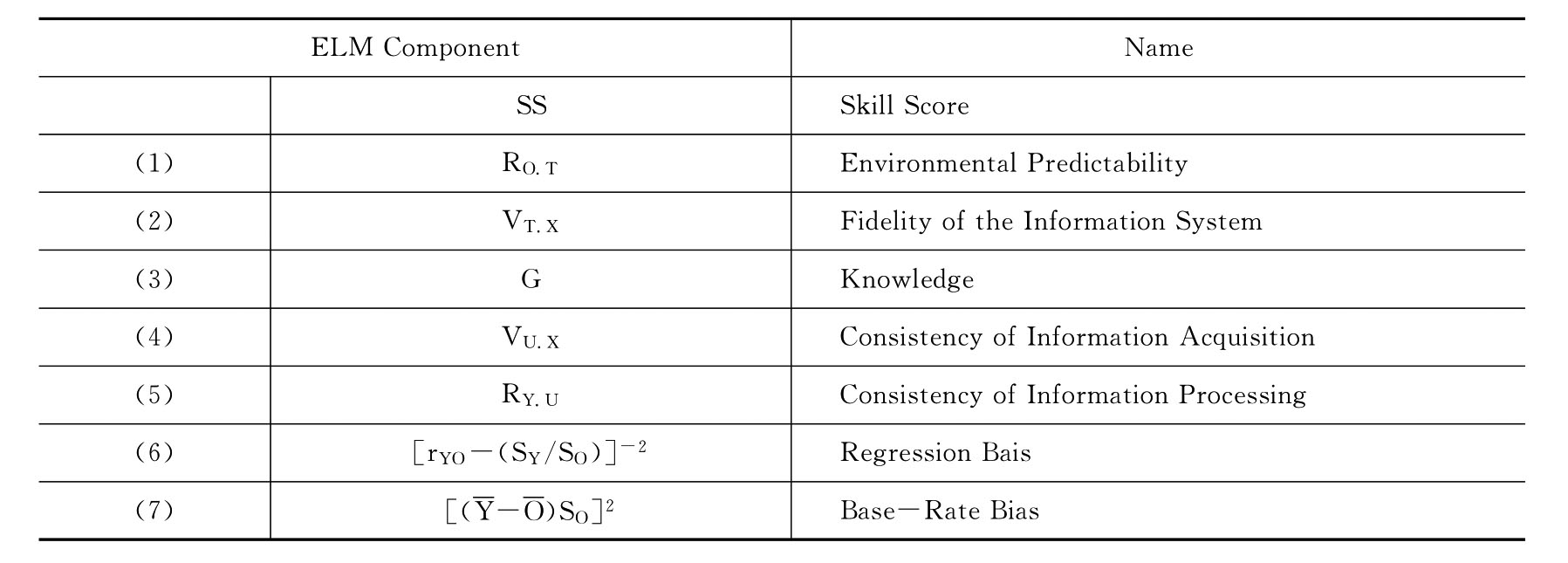
七个要素构成最终ELM分解,要素[6][7]是前面讨论的回归和基率偏差。要素[1]~[5]来自于成效、环境可预测性和LME一致性的分解。要素[3]是从原来的LME遗留下来的,表示操作者对线索——判断依据相关的适应性。要素[1]和[2]代表从情景中提取数据的技术传感器质量([1]),并且技术IP把它转化成显示给操作者的线索([2])。要素[4]和[5]代表获取原始线索的操作者IP质量([4]),以形成次生线索,并把这些次生线索转换成情景判断([5])。在表3中总结了这些要素。
表3 改进的透镜模型的要素
关于SA测量的现实思考。
使用这种方法对界面调节的SA建模和测量要求判断任务可以根据图6所示的结构进行分析。必须把情景定义为要判断的指标,操作者的任务必须定义为所要做的判断,并且信息必须定义为线索的一个集合。此外,为实施(典型)回归建模过程,必须给情景和判断赋值,线索的数字特征,如它们的值和范围,必须予以界定。这可能并非总是可能的,或自然的,当然,该模型为数据收集制订了很高的要求,因为单独估计很多判断参数的需要(例如,见Bisantz,Kirlik,Gay,Phipps,Walker和Fisk,2001)。
除了这些限制,这种方法也不适用于SA的所有方面。例如,认知结构,如记忆、心理图象,注意,认知图片(Endsley,1995b;Wilson,1995)超出了ELM的范围。此外,这种方法也不适用于表达SA和通信之间的关系(Schreiber,Bell和Raspotnik,1998),或SA的情绪和现象方面(Gerson,1997)。
4 相关办法
我们已经讨论了我们的建模和测量SA的技术和Endsley的认知定向SA理论之间的关系。请注意,在任何情况下,我们能够把这些关系描绘为相辅相成的:一种方法考虑的问题而另一种则没有考虑到,并且重叠存在。我们已经表明,一种系统定向的方法可以为测量与IP相关的、在Endsley理论中包含的纯理论结构提供额外资源。类似地,我们认为,系统方法含有两条额外的在人为因素和认知工程中有影响思路之间的一种协同关系。
4.1 人机交互
Parasuraman、Sheridan和Wickens(2000)通过定义自动化的四个“阶段”提供了人机自动化交互(HAI)的框架。阶段1自动化涉及任务环境中信息的获取。阶段2表示一个信息至信息显示器的处理、融合或过滤过程之前。阶段3关注在选择行动方案上的决策支持。阶段4关注行动的执行情况。有篇综述包含HAI研究中对这种框架的各种应用,详见Wickens和Xu(2003)。
我们的SA建模和测量技术的许多要素直接对应于Parasuraman等人的框架。例如,模型把总体任务的可预测性(从操作者的角度)分解为它在环境上的可预测性和感知与(自动的)IP系统在逼真度内的可预测性。这些测度可用于评估,也许能预测额外传感器(阶段1的自动化)或数据融合、过滤等技术(阶段2自动化)的影响。更一般地,我们的SA建模方法允许人们诊断和定位自动化对各种测度的任何积极或消极影响(例如,信息处理的一致性,任务知识等)。我们相信,集合使用Parasuraman等人的框架和系统定位的生态学方法可以预先了解各种自动化对SA的影响。
4.2 自然主义决策
自然主义决策(NDM)范式(Klein,1999)已成为描述判断和决策的一种扩展的观点,集中研究“人们如何在设定情景中使用他们的经验来做决定”(第97页)。关键要注意的是,像NDM,目前对SA测量和建模的系统方法在经典决策理论(CDT)或对认知研究的行为决策方法(BDM)上都没有根据。这两种方法都是基于认知的内在统一性建立模型的。例如,预期效用理论,Bayes定理,等等。就像NDM,我们代之以使用一种基于对应性的方法,其中以适应成效来评价认知和行为(关于基于统一性和基于对应性方法之间的对比讨论,见Hammond,1999)。
在这两种方法之间也有实质性联系。首先,NDM承认,环境的不确定性设置了成效的上限。就像Lipshitz、Klein、Orasanu和Salas(2001)阐述(定量地)的,“不确定性与错误是密切联系的:不确定性越大,发生错误的可能性越大”(第339页)。其次,NDM,由于它的历史根源,Klein的认知发动决策(RPD)模型,十分强调支持推断的诊断线索(Klein,1999)辨识(如Crandall和Getschell-Reiter,1993)。再次,由于当前研究的方法学根源,接近Brunswik的做法(1956),我们研究SA的方法分享NDM“使用主题、任务和环境这些希望推广的代表性实例进行自己的研究”的目标(Lipshitz,Klein,Orasanu和Salas,2001b,第386页)。
但是,我们的方法可能不同于NDM的地方是,我们不必允诺科学研究应该包括“简略建模”作为一个“基本特征”(斜体标出我们的重点,引自Lipshitz等等,2001a,第334-335页)。NDM的简略性承诺,对我们而言,似乎由其认知而不是生态学焦点产生:“NDM将人……置于兴趣的中心并作为其方案的基础”(Lipshitz等等,2001a,第333页)。因此,像前面讨论的Endsley研究一样,NDM的优势在于其心理学构想的丰富性(例如,“精神图象”,“先验认知”等),因为这些被认为需要加上自然主义认知的真实现象学解释。
我们认识到自然主义观察的价值,并且承认我们的技术没有涵盖SA的所有可能方面。然而,我们的看法是,虽然过早形式化是不合适的,旨在增强形式表达仍应是人为因素研究的方向,随着形式变得抽象化,保证一般化就有了核心的手段,或者至少可以实证检验和评估。
5 结 论
我们在建模和测量界面中介的SA方面提出了一种系统定向的、生态学的观点。虽然这种方法没有谈到每一种理论结构,或涉及先前宣称对形成SA起作用的一种现象。我们认为它应该被视为人为因素工具箱的一个添加,因为理论和应用的进展取决于测量的进展。我们还讨论了我们的方法如何补充了相关的方法,不仅对SA,而且还对HAI和NDM。抽象地来看,我们的技术在不确定性任务的表现上支持分离信号和噪声。我们意识到为应用这些技术所需要的数据可能与实地研究的现实不符。因此,我们自然地不建议对涉及SA的每一项研究都使用这些方法。
但是,我们注意到这些技术被看成是过滤不确定情景行为中信号和噪声的工具,在衡量有关基于稀疏数据集维持内在心理学过程任何宣称的达到程度这种技术也是很有用的。虽然在不确定任务中情景和行为的大量抽样调查需求可认为是我们方法的合理限制,但是同样的问题应该会提醒我们关注任何基于稀疏数据集辨识形成SA的因素所使用的推理技术的可靠性。
本文的姐妹篇(Strauss和Kirlik,2003)描述了这个SA建模和测量方法效用的首次实证评估,这种方法诊断、隔离了显示器设计差异和SA成效个体差异的影响。
致谢
感谢Johns Hopkins应用物理试验室和Naval空中研究中心的支持。
参考文献
Adams,M.J.,Tenney,Y.J.,and Pew,R.W.(1995).Situation awareness and cognitive management of complex systems.Human Factors,37(1),85-104.
Bisantz,A.,Kirlik,A.,Gay,P.,Phipps,D.,Walker,N.&Fisk,A.D.(2001).Modeling and analysis of a judgment task using a lens model approach.IEEE Transactions on Systems,Man and Cybernetics-Part A:Systems and Humans,Vol.30,No.6.
Brehmer,B.(1994).The psychology of linear judgment models.Acta Psy.87,137-154.
Brunswik,E.(1956).Perception and the Representative Design of Psychological Experiments.Berkeley,CA:University of California Press.
Cooksey,R.W.(1996).Judgment Analysis:Theory,Methods,and Applications.San Diego,CA:Academic Press,Inc.
Crandall,B.&Getchell-Reiter,K.(1993).Critical decision method:A technique for eliciting concrete assessment indicators from the intuition of NICU nurses.Advances in Nursing Science,16(1),42-51.
Cronbach,L.J.,Gleser,G.C.(1953).Assessing similarity between profiles.Psychological Bulletin,50(6),456-473.
Durso,F.T.,Gronlund,S.(1999).Situation awareness.In Durso,F.T.,Nickerson,R.,
Schvaneveldt,R.W.,Dumais,S.T.,Lindsay,D.S.,Chi,M.T.H.(Eds).,The Handbook of Applied Cognition(284-314).:Wiley.
Endsley,M.R.(1995a).Measurement of situation awareness in dynamic systems.Human Factors,37(1),65-84.
Endsley,M.R.(1995b).Toward a theory of situation awareness in dynamic systems.Human Factors,37(1),32-64.
Endsley,M.R.(1996).Automation and situation awareness.In R.Parasuraman &M.Mouloua(Eds.),Automation and Human Performance:Theory an Applications(pp.163-181).Mahwah,NJ:Lawrence Erlbaum Associates.
Endsley,M.R.(1997).The role of situation awareness in naturalistic decision making.In C.E.
Zsambok &G.Klein(Eds.),Naturalistic Decision Making(pp.269-283).Mahwah,NJ:LEA
Endsley,M.R.and Garland,D.J.(Eds)(2001).Situation Awareness:Analysis and Measurement.Mahwah,NJ:Erlbaum.
Endsley,M.R.,Smolensky,M.W.(1998).Situation awareness is air traffic control:The picture.In M.W.Smolensky &E.S.Stein(Eds.),Human Factors in Air Traffic Control.San Diego,CA:Academic Press.
Flach,J.M.(1995).Situation awareness:Proceed with caution.Human Factors,37(1),149-157.
Gerson,C.W.(1997).Situation awareness and dynamic performance training systems:Some reflections on the literature.Journal of Educational Technology Systems,25(4),373-407.
Gibson,C.P.,Garrett,A.J.(1990).Towards a future cockpit—The prototyping and pilot integration of the mission management aid(MMA).Paper presented at the Situational Awareness in Aerospace Operations,Copenhagen,Denmark.
Gibson,J.J.(1979).The Ecological Approach to Visual Perception.Hillsdale,NJ:Lawrence Erlbaum Associates,Inc.
Hammond,K.R.(1999).Coherence and correspondence theories of judgment and decision making(pp.53-65).In T.Connolly,H.R.Arkes,and K.R.Hammond(Eds.),Judgment and Decision Making:An Interdisciplinary Reader.New York:Cambridge University Press.
Hursch,C.J.,Hammond,K.R.,and Hursch,J.L.(1964).Some methodological considerations in multiple-cue probability studies.Psychological Bulletin,71,42-60.
Kirlik,A.(2000).Human factors.In Hammond,K.R.&Stewart,T.(2000).The Essential Brunswik.New York:Oxford University Press.
Klein,G.A.(1999).Applied decision making.In P.A.Hancock,(Ed.),Handbook of Perception and Cognition:Human Performance and Ergonomics,pp.87-108.New York:Academic Press.
Lee,J.-W.,and Yates,J.F.(1992).How quantity judgment changes as the number of cues increases:An analytical framework and review.Psychological Bulletin,112(2),363-377.
Lipshitz,Klein,Orasanu,and Salas(2001a).Focus article:Taking stock of naturalistic decision making.J.Behav.Dec.Making,14,331-352.
Lipshitz,Klein,Orasanu,and Salas(2001b)Rejoinder:A welcome dialogue-and the need to continue.J.Behav.Dec.Making,14,385-389.
Murphy,A.H.(1988).Skill scores based on the mean square error and their relationships to the correlation coefficient.Monthly Weather Review,116,2417-2424.
Neisser,U.(1976).Cognition and Reality:Principles and Implications of Cognitive Psychology.San Francisco,CA:W.H.Freeman.
Parasuraman,R.,Sheridan,T.B.,Wickens,C.D.(2000).A model for types and levels of human interaction with automation.IEEE Transactions on Systems,Man,&Cybernetics-Part A:Systems and Humans,30(3),286-297.
Pew,R.W.(1995).The state of situation measurement:Circa 1995.Paper presented at the International Conference on Experimental Analysis and Measurement of Situation Awareness,Daytona Beach,FL.
Rothrock,L.&Kirlik,A.(in press).Inferring rule-based judgment strategies in dynamic tasks.IEEE Systems,Man and Cybernetics-Part A:Systems and Humans.
Salas,E.,Prince,C.,Baker,D.P.,and Shrestha,L.(1995).Situation awareness in team performance:Implications for measurement and training.Human Factors,37(1),123-136.
Schreiber,B.T.,Bell,H.H.,and Raspotnik,W.B.(1998).Investigating communication and situation awareness in air combat.Paper presented at the Human Factors and Ergonomics Society 42nd Annual Meeting.
Smith,K.,and Hancock,P.A.(1995).Situation awareness is adaptive,externally directed consciousness.Human Factors,37(1),137-148.
Stewart,T.R.(1990).A decomposition of the correlation coefficient and its use in analyzing forecasting skill.Weather and Forecasting,5,661-666.
Stewart,T.R.,Lusk,C.M.(1994).Seven components of judgmental forecasting skill:Implications for research and improvement of forecasts.Journal of Forecasting,13,579-599.
Strauss,R.and Kirlik,A.(2003).A systems perspective on situation awareness II:Experimental evaluation of a modeling &measurement technique.Ms submitted for publication.
Taylor,R.M.(1990).Situational Awareness Rating Technique(SART):The development of a tool for aircrew systems design.Paper presented at the Situational Awareness in Aerospace Operations,Copenhagen,Denmark.
Tucker,L.R.(1964).A suggested alternative formulation in the developments of Hursch,Hammond,and Hursch,and Hursch,Hammond &Todd.Psychological Review,71(6),528-530.
Wesler,M.M.,Marshak,W.P.,and Glumm,M.M.(1998).Innovative measures of accuracy and situational awareness during landing navigation.Paper presented at the Human Factors and Ergonomics Society 42nd Annual Meeting.
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。











