



1.2 机载激光雷达测量技术的发展与现状
利用激光作为遥感设备可追溯到30多年以前。从20世纪60年代到70年代,人们进行了多项试验,结果都显示了利用激光进行遥感的巨大潜力,其中包括激光测月和卫星激光测距。激光雷达测量技术是一门新兴技术,在地球科学和行星科学领域有着广泛的应用。美国早在20世纪70年代阿波罗登月计划中就应用了激光雷达测高技术(Kaula,et al,1974)。20世纪80年代期间,激光雷达测量技术得到了迅速发展,包括当时美国NASA研制的大气海洋Lidar系统(AOL)以及机载地形测量设备(ATM)等机载系统。但机载激光雷达测量技术直到最近十几年才取得了重大进展,并研制出精确可靠的激光雷达测量传感器,包括航天飞机激光测高仪(Shuttle Laser Altimeter,SLA)(Garvin,et al,1998)和火星观测激光测高仪(Mars Observer Laser Altimeter,MOLA)(Smith,et al,1998)以及月球观测激光测高仪(Lunar Observer Laser Altimeter,LOLA)(Garvin,et al,1988)。利用它们可获取地球表面、火星表面及月球表面的高分辨率的地形信息,这对于研究地球和火星等行星的真实形状等有着重要的科学意义。航天飞机激光雷达测高仪由NASA/GSFC设计,它是一种空间飞行仪器,安置在航天飞机上,从地球低轨道高度上测量地形,可为星载激光雷达测高进行科学试验。1984年,就有研究者从事机载激光雷达地形测量的研究,并给出了测量结果(Krabill,et al,1984)。德国斯图加特大学摄影测量学院在1988年开始研究机载激光扫描地形断面测量系统。荷兰测量部门自1988年就开始从事利用激光雷达测量技术提取地形信息的可行性研究。加拿大卡尔加里大学1998年进行了机载激光雷达系统的集成与实验,通过对激光扫描仪与GPS、INS和数据通讯设备的集成实现了一个机载激光雷达三维数据获取系统,并进行了一定规模的实验,取得了理想结果。日本东京大学1999年进行了地面固定激光扫描系统的集成与实验(Zhao H J,et al,1997,1999)。随后几年,随着相关技术的不断成熟,机载激光雷达技术得到了蓬勃发展,欧美等发达国家先后研制出多种机载激光雷达测量系统,其中主要包括TopScan、Optech、TopEye、Saab、Fli-map、TopoSys、HawkEye等多种实用系统(Baltsavias,1999c)。随后,全球著名的测绘仪器生产厂家Leica公司也推出了机载激光雷达测量设备Leica ALS40。据统计,截至2001年7月,全球约有75个商业组织使用60多种类似的系统,从1998年起,以每年25%的速度递增(Flood M,2001)。
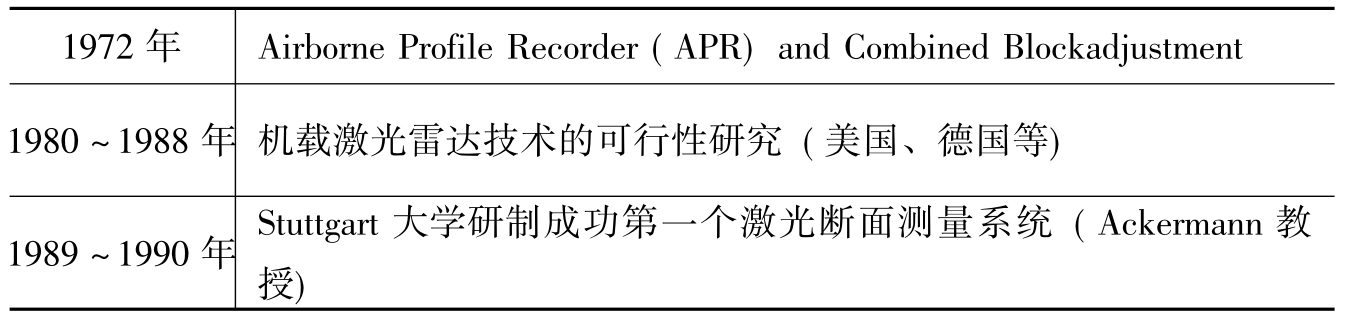
关于机载激光雷达测量技术的发展历史可归纳成表1-1。
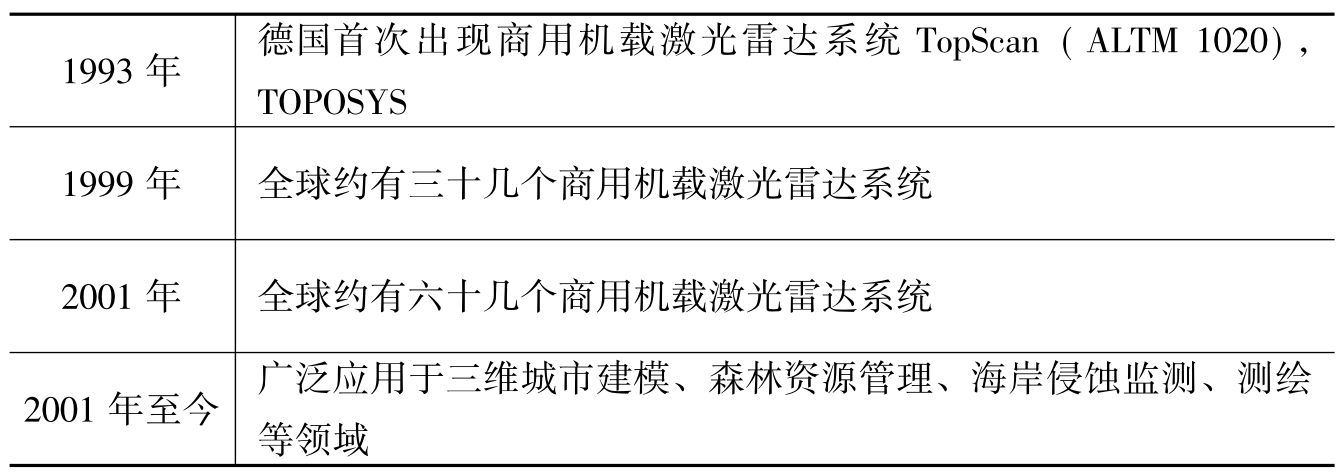
表1-1 机载激光雷达测量技术的发展简史
续表
随着机载激光雷达系统的不断成熟,其应用范围不断扩大。美国、加拿大、澳大利亚、瑞典等国为浅海地形测量发展的低空机载激光雷达测量系统使用了机载激光测距设备、全球定位系统(GPS)、陀螺稳定平台等设备,飞行高度为500~600m,直接测距与定位,最终得到浅海地形(或DEM)。比较典型的是美军现用的一种独具特色的激光扫描水下地形测量系统(Scanning Hydrographic Operational Airborne Lidar Survey,SHOALS)(Irish J L,et al,1999),它采用激光雷达技术实施远距离量测浅海深度,并测绘海岸地带的地形,监测海岸侵蚀等,如图1-1所示。该系统于1994年3月正式投入使用。作业实践表明,机载激光雷达测深是一种经济有效的技术手段。美国HARC(Houston Advanced Research Center)的激光雷达地形测量系统于1994年已做了飞行试验,飞行高度为600m,最终产品的飞行高度设计为1600~1700m。采用扫描激光测距方式,利用全球定位系统(GPS)作定位,姿态测量装置据估计是惯性导航系统(INS)。据了解,这种系统标称能“隔夜”提供DEM,显然生成DEM的速度比常规技术要快若干倍,可实现准实时遥感信息的定位并生成DEM,效率将比现有的信息获取技术提高约几十倍。德国联邦政府测绘局(SMA)1994年开始研究利用激光扫描技术获取数字地形模型,获取地面真实正射影像,通过对数据进行滤波和分类,将地面点跟建筑物或植被点分开。现在德国已有几个州的测绘部门进行了用激光雷达测量数据生成高质量DTM的试验,结果都很理想,特别是在林区,所达精度甚至优于摄影立体编辑法获得的精度。荷兰已在全国范围内利用机载激光测高技术建立数字高程模型(DEM),采集数据的空间分辨率已达到每16m2有一个激光脚点(Husing,et al,1998)。
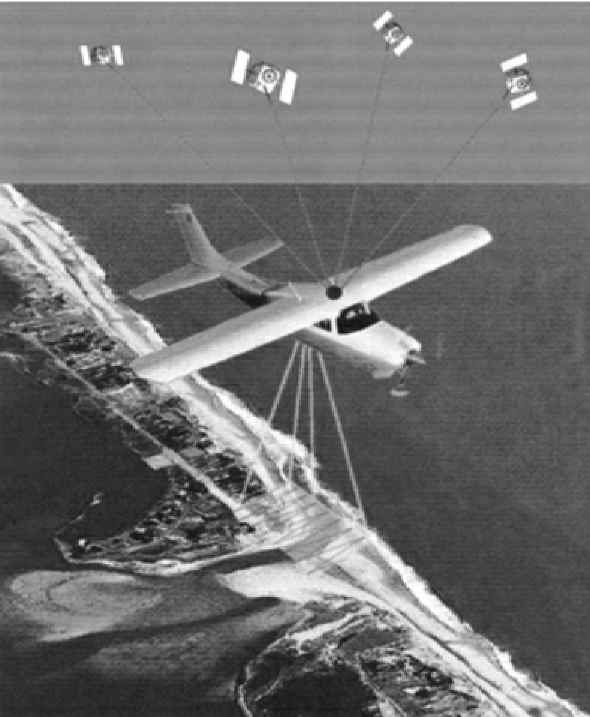
图1-1 SHOALS系统测绘浅海地形
美国NASA于2003年初发射了星载激光测高卫星(Ice,Cloud and Land Elevation Satellite,ICESat),该卫星的科学目的主要是:①用于测量两极冰面地形及其随时间的变化,为预测未来两极冰盖的变化趋势以及海平面的变化提供基础数据,研究全球气候的变化;②应用于大气科学研究,研究大气层的垂直结构等,从而为研究整个大气圈的变化和中长期的气候变迁提供科学的数据;③用于测绘陆地地形图,进行全球植被覆盖率的调查和动态监测,获取全球数字高程模型。
美国NASA还开发研制了机载激光植被成像传感器(Laser Vegetation Imaging Sensor,LVIS)系统(Blair J B,et al,1999),该系统可用于森林资源的调查和管理,包括推算植被参数和森林垂直结构,如树高、树冠直径、树木密度、植被生长情况、木材量、树种等。机载激光植被成像传感器实际上是美国NASA后续的地球遥感卫星VCL(Vegetation Canopy Lidar)计划的预研。
相比国外,机载激光雷达测量技术的研究在国内的起步较晚。中国科学院遥感应用研究所的李树楷教授等研制的机载激光扫描测距-成像系统于1996年完成了该系统原理样机的研制(李树楷等,2000)。该系统还有别于目前国际上流行的机载激光雷达系统,它将激光测距仪与多光谱扫描成像仪共用一套光学系统,通过硬件实现DEM和遥感影像的精确匹配,直接获得地学编码影像,但该系统离实用还有一段距离。李树楷教授在书中写道,“具有高效特色的机载激光影像制图系统的原理样机已经完成了。距实用化尤其是形成产品尚有一段距离。缩短这段距离不仅是技术上需要时间,更重要的是要为专家所接受,要为科技发展的决策者所接受,要为社会所接受,这种非技术因素比技术难度更复杂、更困难,需要时间更长。”(李树楷等,2000)。武汉大学的李清泉教授等开发研制了地面激光扫描测量系统,还没有将定位定向系统集成到一起,目前主要用于堆积测量(李清泉等,2000)。目前,我国十分重视激光雷达测量系统的研制,科技部、电子工业部、中国科学院等单位已经开始研制机载或星载激光雷达系统。武汉大学、中国测绘科学研究院等单位正在引进国外机载小光斑激光雷达系统。北京星天地信息科技有限公司、山西亚太数字遥感新技术有限公司以及广西桂能信息工程有限公司等已经分别引进了高性能的机载小光斑激光雷达系统,并已先后开展了试验和工程飞行。在今后的几年里,将有更多的商用机载激光雷达测量系统进入中国。
尽管机载激光雷达测量技术的发展已有近二十年的历史,硬件技术也在不断发展,绝大部分属于硬件技术及系统集成的问题已得到解决,已有不少成熟的商用系统,但激光雷达测量数据后处理的研究还相对滞后,目前国际上用于处理机载激光雷达测量数据的软件还不多,主要有TerraScan、TopPIT、REALM等少数几个,在一些处理环节还需要大量的人工干预,还没有一套非常成熟的、自动化程度高的处理机载激光雷达测量数据的综合性软件。目前,上述几个机载激光雷达测量数据处理软件基本是由各自的硬件厂商提供的(如Optech的REALM软件)。这些软件的算法都是保密的,对用户来讲是一个“黑盒子”。随着机载激光雷达测量系统的不断增多,其用户也会越来越多,数据量越来越大,迫切需要一套通用的实用化软件来处理和分析机载激光雷达测量数据,从而生产出各种满足不同需要的数字化产品。开发研制一套可靠稳健的机载激光雷达测量数据处理软件将是国际上今后的发展方向之一,许多商业公司以及大学科研机构都投入了大量的人力和财力进行相关的算法研究,希望抢占先机,当然还会有一段路要走。
目前,机载激光雷达的数据处理方面的多数研究还集中于对原始数据的过滤和分类,各种算法都还具有一定的局限性,并不是很成熟。荷兰Delft技术大学在植被及建筑物的自动识别与分类以及道路的半自动提取等方面取得了初步成果;融合多光谱数据、GIS数据、航空影像数据进行高层次处理还处于研究阶段,算法复杂,不易进行质量控制;基于激光雷达测量数据的地物提取、城市建模等国际上还刚起步,目前主要集中在奥地利Vienna技术大学、荷兰Delft技术大学、俄亥俄州立大学、德国斯图加特大学、加拿大的卡尔加里大学等。
机载激光雷达测量技术目前主要用于快速获取大面积三维地形数据、快速生成DEM等数字产品,特别是用于测绘森林覆盖区域和山区的真实地形图(Petzold B,et al,1999,Kraus K,et al,1998,Pereira L M G,et al,1999,Wehr A,et al,1999,Hu Y,2003);将机载激光雷达技术作为一种新的技术手段应用于快速生成城市地区的数字表面模型(DTM),进行地物自动提取,由数字表面模型(DTM)生成数字高程模型(DEM),并进一步建立三维城市模型(3D city),也是当前在该领域的一个研究热点;借助于大激光束脚印的回波信号的波形分析进行森林资源普查以及植被参数的测定也是另一个热点方向。
如今,机载激光雷达测量技术实际上有两个明显的分支,一种是小光斑脉冲测时激光雷达;另一种就是利用数字化波形技术分析激光束整个回波波形的大光斑激光雷达技术,这种激光雷达可以获取激光目标脚印完整的高程剖面,这种系统主要是用于获取地球森林植被参数以及激光测深等。目前,绝大部分的机载激光雷达测量的商用系统都是基于小光斑的激光雷达测量,这种激光雷达的光斑小,激光脉冲重复频率高。对于机载激光雷达测量系统,不同的文献有不同的叫法,归纳起来主要有以下几种:机载激光测高(Airborne Laser Altimetry,ALA)(Baltsavias,1999c)、激光雷达(Light Detection And Ranging,LIDAR)(Flood,2001)、机载激光地形测绘(Airborne Laser Topographic Mapping/Airborne Laser Terrain Mapping,ALTM)(Krabill,1984)、机载激光测图系统(Airborne Laser mapping,ALM)(Berg,2000)、机载激光扫描测量系统(Airborne Laser Scanning,ALS)(Wehr,et al,1999)、激光测高(Laser Altimetry,LA)(Flood,2001)。本书中统一称为机载激光雷达测量系统,简称机载LIDAR。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。










