



§4.2 机载激光雷达测量主要误差概述
机载激光雷达测量数据在进行生产时产生的误差,主要存在于机载激光雷达测量系统的误差、控制网误差以及后期数据处理的误差三大部分。
4.2.1 机载激光雷达测量系统的误差
机载激光雷达测量系统的误差主要由如下四类构成:
(1)GPS定位误差;
(2)GPS/INS组合姿态确定误差和扫描角误差;
(3)激光扫描测距误差;
(4)系统集成误差。
上述误差都必须在做航测设计的时候就提前考虑到,并采取相应的方法和措施尽量避免或减小误差。一旦采集获取的原始数据质量不符合要求,后面采取的任何补救措施都是于事无补的。
1.GPS定位误差
GPS定位误差是影响机载激光雷达测量系统精度的最主要原因,这主要是GPS的精度原因造成的。由于机载GPS是高速动态获取数据,所以很容易受到各方面的影响,如卫星轨道误差、卫星钟钟差、接收机钟差、多路径效应、卫星星座和观测噪声等原因,而且这些误差是随着观测环境的变化而变化,要想在后期数据处理时消除这些误差是比较困难的,甚至是不太可能的。所以减少GPS定位误差的工作主要放在数据采集上,可以通过在测区内均匀建立多个地面基准站,然后进行激光雷达数据采集。摆设多基准站不但可以减弱各方面的影响,还有利于改善大气误差改正模型。
在实际作业过程中,一般要摆设3个以上的地面基准站,并且保证各个地面基准站之间的距离为30~50km(小于30km为佳),通过DGPS解算后能获取比较理想的结果。
2.GPS/INS组合姿态确定误差、扫描角误差和激光扫描测距误差
GPS/INS组合姿态确定误差和扫描角误差属于机载激光雷达测量系统硬件自身的误差,只能通过激光雷达测量技术的发展和设备的升级来减少其误差,在实际作业中INS姿态测量误差,可以通过降低飞行高度来减弱其影响。
激光扫描测距误差主要是由于激光扫描测距仪器误差、大气折射误差和与反射面有关的误差,理论上可以通过一些方法加以纠正,但对于实际生产来说可操作性不高。将来科技的发展、激光雷达制造工艺的完善将会更理想地解决这些误差问题。在实际生产过程中,一般都是改变激光的频率去减弱相应误差,这就要求在做航摄设计时要充分考虑实际测区的作业环境、地表地物的状况等背景因素。
3.系统集成误差
对于系统集成误差,在实际作业中主要关注偏心分量和偏心角的获取,分别将IMU测量中心、机载GPS天线相位中心和激光仪器中心的空间偏移投影在以激光仪器中心为原点的像空间辅助坐标系上(以铅垂方向为Z轴,航线方向为X轴),分解为六个坐标分量,称为偏心分量。偏心分量的获取在每次航摄作业都要进行实地测量,其测量的方法很多,可以采用如近景摄影测量法、经纬仪测量法、平板玻璃直接投影法和地面激光设备扫描法测定,实际操作时根据项目精度要求来选择合适的测量方法,但偏心分量的测量误差应不大于1cm。
IMU与激光雷达仪器紧密固联后,各轴指向之间形成的角度称为偏心角。从理论上讲,每次作业时偏心角可以通过扫描已知规则地物,然后用分步几何法恢复出系统的安置角误差(偏心角)。但实际生产中,由于系统固定后偏心角相对变化都比较微小,所以为了缩短作业时间,降低作业成本,只需要采用上次作业时采用的偏心角值,在软件观察检校场数据中各航线存在的高差,通过微调偏心角值使之消除高差,即可以快捷地得到满足要求的偏心角值。由于航摄仪一般不和IMU固定在一起,这样IMU与航摄仪的偏心角变化是比较大的,需要用软件进行航片间连接点平差后计算出其偏心角值,如图4-1所示。
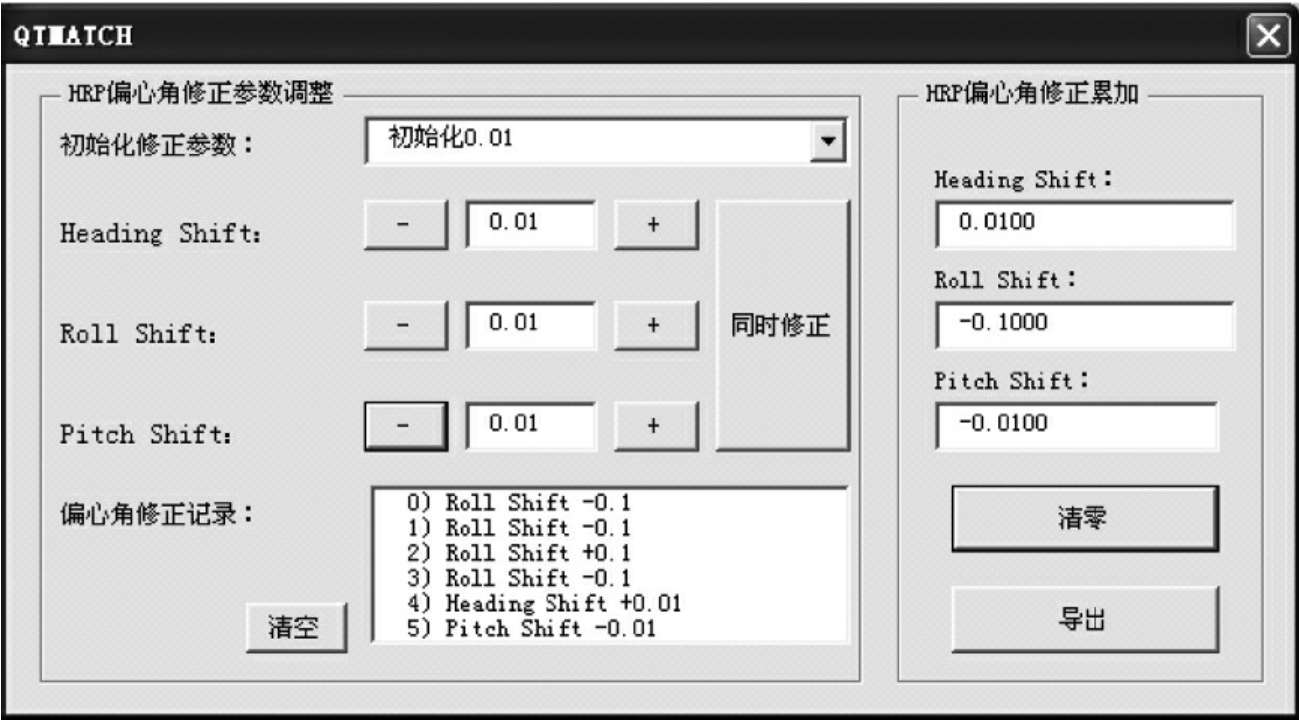
图4-1 偏心角计算
从图4-2和图4-3的航线激光点云剖面图可以看出,经调整后可以明显看出航带之间激光点云存在的高差,从而快捷确定偏心角值。
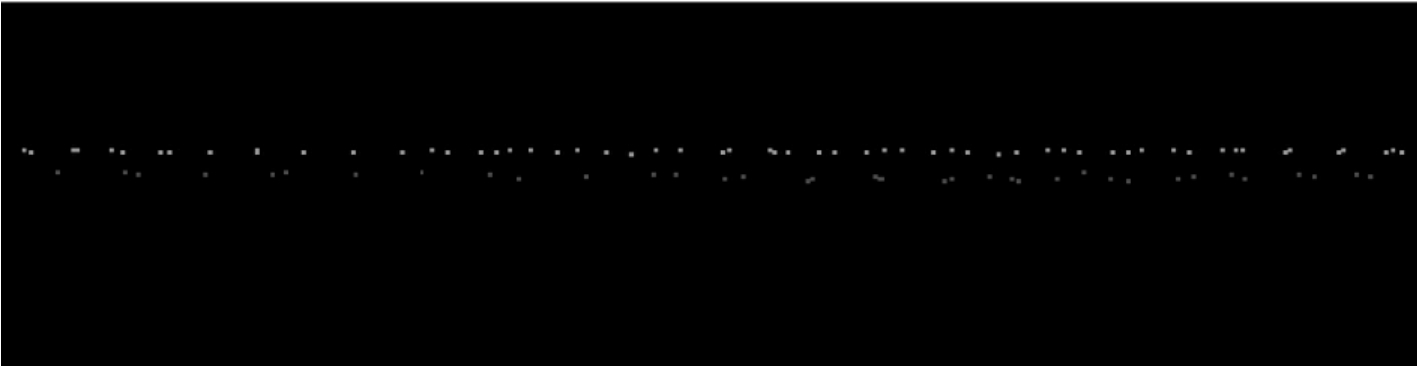
图4-2 激光点云调整前示意图
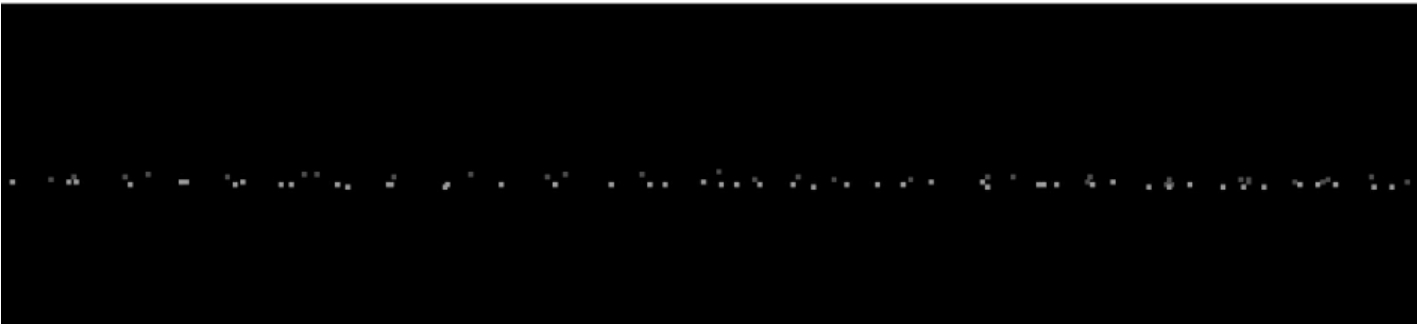
图4-3 激光点云调整后示意图
在实际生产作业过程中,一般最大高差应保证小于0.3m。
4.2.2 控制网误差
机载激光雷达测量最大的误差源是GPS的定位精度,地面基准站作为起算点参与DGPS解算将有利于减少误差。因此,为获取高精度的激光数据必然需要架设地面基准站。如果测区内没有相应精度的控制点,基准站可以摆放在通过控制网测量取得的符合精度要求的已知控制点上,控制网的精度控制可以按照一般工程控制测量控制网的作业要求进行质量控制。
基准站的摆放地点需要考虑卫星可用性、周边是否存在潜在干扰源(如高大建筑物、金属物体反射面、树林、水域、微波站、无线电发射、高压线、雷区)等因素。通常尽量选择摆放在有利于GPS卫星信号接收的地方,与干扰源距离至少大于100m。
4.2.3 数据处理误差
数据处理的误差主要包括数据前处理误差和数据后处理误差两大部分。
数据前处理误差主要包括GPS差分解算过程中产生的误差、原始数据集成处理过程中产生的误差、原始数据坐标系转换以及水准校正中产生的误差。
数据后处理误差主要包括激光点云航带匹配检查时产生的误差、分块批处理时产生的误差、激光点云数据分类产生的误差、航片连接点匹配时产生的误差,以及DEM、DOM生成时产生的误差。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。











