



【摘要】:机载激光雷达测量对地定位原理示意图见图2-5。对于机载激光雷达测量系统来说,起点Os为遥感器光学系统的投影中心,其坐标可利用动态差分GPS或精密单点定位技术测定;向量S的模是由激光测距系统测定的机载激光测距仪参考中心到地面激光脚点间的距离,姿态参数可以利用高精度姿态测量装置获得。有关定位原理的内容详见第3章。
机载激光雷达测量对地定位原理示意图见图2-5。若空间有一向量S,其模为S,方向为(φ,ω,κ),如能测出该向量起点Os的坐标(Xs,Ys,Zs),则该向量的另一端点P的坐标(X,Y,Z)可惟一确定。对于机载激光雷达测量系统来说,起点Os为遥感器光学系统的投影中心,其坐标(Xs,Ys,Zs)可利用动态差分GPS或精密单点定位技术测定;向量S的模是由激光测距系统测定的机载激光测距仪参考中心到地面激光脚点间的距离,姿态参数(φ,ω,κ)可以利用高精度姿态测量装置获得。此外,还必须顾及到一些系统安置偏差参数:激光测距光学参考中心相对于GPS天线相位中心的偏差,激光扫描器机架的三个安装角,即倾斜角、仰俯角和航偏角,IMU机体同载体坐标轴系间的不平行等。这些参数都需要通过一定的检校方法来测定。有关定位原理的内容详见第3章。
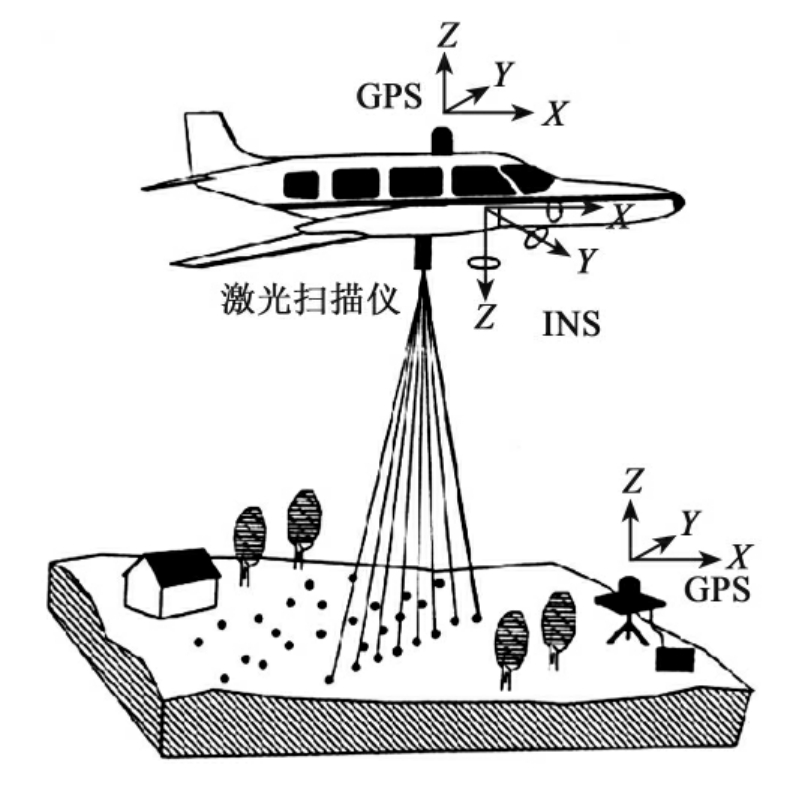
图2-5 机载激光雷达测量系统对地定位示意图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。











