



【摘要】:激光脚点数据经过前面的滤波或过滤,只是分离出了地面脚点和地物脚点。如果要提取地物,必须在此基础上进一步进行地物脚点的分类,有时地面脚点系列也要进行进一步的分类,如要进行道路的提取。利用机载激光雷达测量数据自动提取地面目标,如房屋或植被,首要的关键任务就是对该数据进行分类。为此,人们提出了一系列用于机载激光雷达数据分类(分割)的算法。
5.5 机载激光雷达测量数据分类分割
激光脚点数据经过前面的滤波或过滤,只是分离出了地面脚点(DTM)和地物脚点。如果要提取地物,必须在此基础上进一步进行地物脚点的分类(区分人工地物和自然地物),有时地面脚点系列也要进行进一步的分类,如要进行道路的提取。利用机载激光雷达测量数据自动提取地面目标,如房屋或植被,首要的关键任务就是对该数据进行分类。为此,人们提出了一系列用于机载激光雷达数据分类(分割)的算法。目前,绝大多数算法都是先将原始数据直接内插成规则格网的距离图像,在此基础上提出了基于高程纹理特征的分割算法(Mass,1999a);利用2D GIS数据进行分割(Haala/Brenner,1997,Lemmens,et al,1997);基于小波变换和尺度空间理论分割激光雷达数据(VU,et al,2001);利用局部直方图分析技术并融合激光强度信息进行分割(Hug/Wehr,1997)等,这也是很多文献称为分割的原因。前面已经指出,滤波算法是基于离散的激光脚点进行的,在滤波过程中并不内插形成规则格网数据,对数据的操作还是对每个激光脚点的操作。所以本书约定,如果对激光脚点的属性进行识别,就是分类;如果对激光距离或强度图像进行处理,并以一定的方式标识出每一块的属性,就称为分割。
下面给出数据分类的原理示意图(见图5-13)。图5-13(a)表示一个激光扫描剖面的激光脚点没有进行分类,图5-13(b)(见彩图插页)表示对该剖面的激光脚点进行分类的结果。
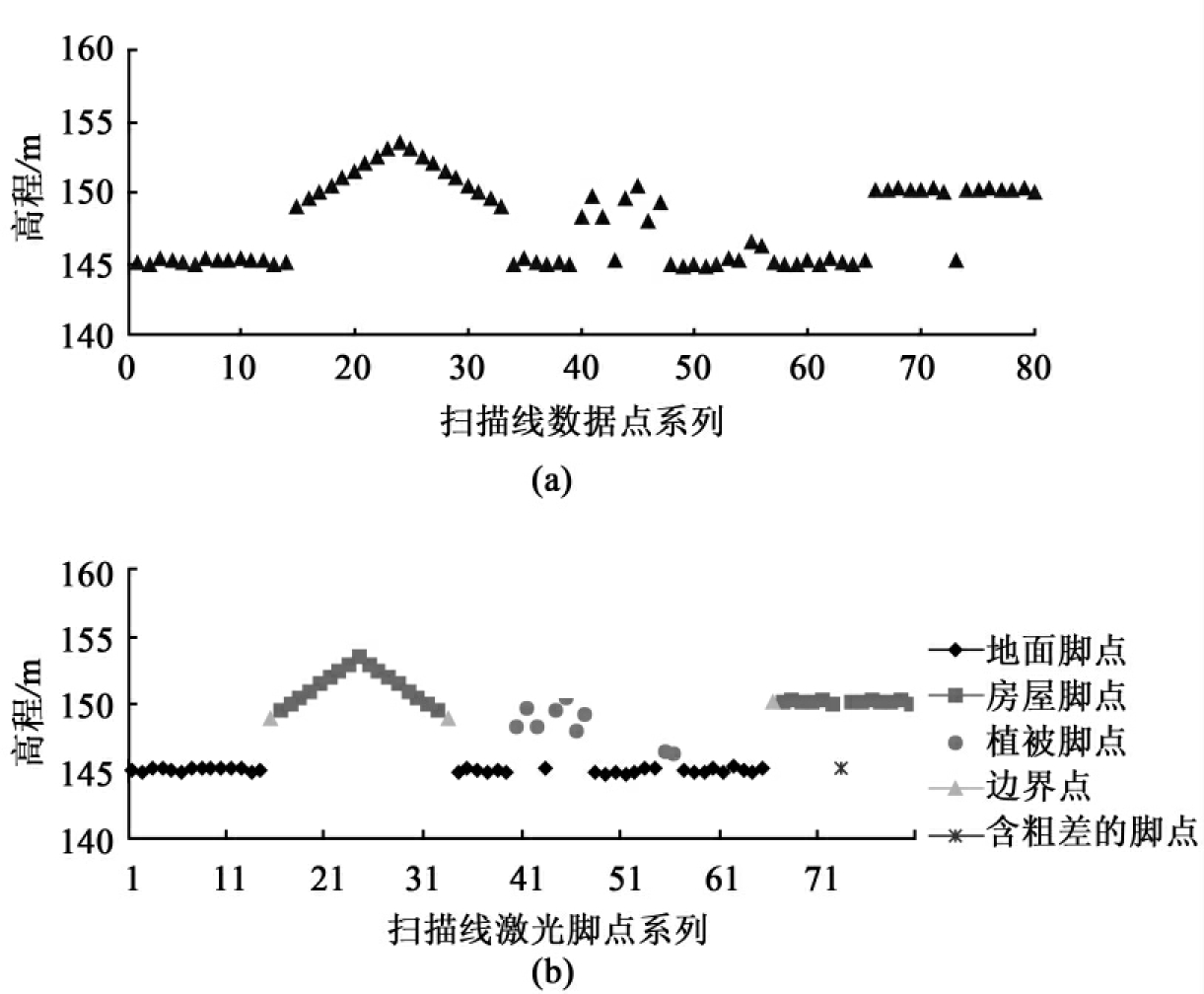
图5-13 激光扫描剖面分类示意图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。











