



【摘要】:3.3.6 机载激光雷达测量综合几何模型综合式(3.13)~式(3.19),得激光脚点在WGS-84系下的坐标为:如果用向量的形式来表示为:PWGS-84=RW·RG·RN(RM·RL·r+tL-tG)+APCWGS-84(3.21)式中,PWGS-84=(x84,y84,z84)T是激光脚点在WGS-84系中的坐标;是天线相位中心与惯性
3.3.6 机载激光雷达测量综合几何模型
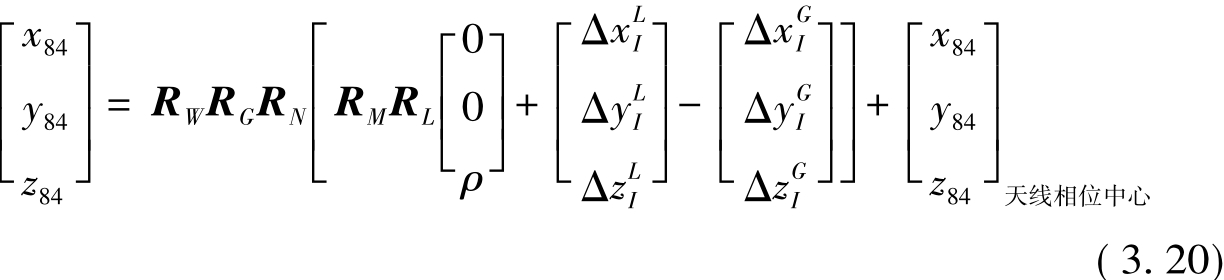
综合式(3.13)~式(3.19),得激光脚点在WGS-84系下的坐标为:
如果用向量的形式来表示为:
PWGS-84=RW·RG·RN(RM·RL·r+tL-tG)+APCWGS-84
(3.21)
式中,PWGS-84=(x84,y84,z84)T是激光脚点在WGS-84系中的坐标;
 是天线相位中心与惯性平台参考中心的偏移量;
是天线相位中心与惯性平台参考中心的偏移量;
 是激光发射参考中心与惯性平台参考中心的偏移量;
是激光发射参考中心与惯性平台参考中心的偏移量;
APCWGS-84=(x84,y84,z84) 是天线相位中心在WGS-84系的坐标(航迹);
是天线相位中心在WGS-84系的坐标(航迹);
r=(0,0,ρ)T是激光脚点在瞬时激光束坐标系中的位置向量;
RW、RG为和当前位置有关的坐标转换旋转矩阵;
RN、RL为实测或内插的姿态角和扫描角有关的旋转矩阵;
RM是安置误差旋转矩阵。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。









