



机载激光雷达测量与航空摄影测量在某些方面具有一定的相同点,具体如下。
(1)两者都需要配备GPS/INS和数字摄影测量传感器;
(2)处理原始数据的方法有类似之处,如粗差过滤、非地形特征地物数据的剔除、数据压缩、断裂线的探测等;
(3)机载激光雷达测量数据经过格网内插后也能形成纹理图像,然后应用各种图像分析和处理算法进行后续的图像分析和理解,因此,传感器的集成以及图像(数字信号)的处理和分析是它们共同研究的两大主题。
航空摄影测量处理的数据是灰度影像,其主要产品是DTM、DSM、正射影像,还可应用于2D或3D重构,地物分类以及可视化(地图、3D景观、动画和仿真)。处理航片时,通常是用解析测图仪。当前已进入数字摄影测量时代,数字摄影测量系统处理的对象是数字影像,不少处理算法还在不断的发展完善。摄影测量理论的发展历程已超过一个世纪,近20年来的研究重点是借助图像处理分析算法从数字影像中自动提取地物信息。
机载激光雷达测量获得的原始数据通常用机载激光雷达硬件生产厂家提供的专用软件处理,而这些软件的算法通常不会公开。特别是数据后处理过程中的数据滤波,数据分类的处理算法更为复杂,针对不同的地形特征条件,所使用的方法就可能不同。目前,国际上还没有一套完整而成熟的独立于硬件系统的商用化激光雷达测量数据处理分析软件。当然也有一些商用软件能够处理GPS/INS数据、大地坐标转换、可视化、DTM的内插。因此,相对航空摄影测量而言,机载激光雷达是一种新技术,其应用会受产品价格、系统集成度以及处理算法的成熟程度、供应商的数量等因素的影响(Baltsavias,1999b)。
尽管两者都可用于获取地形表面数据或对单个目标进行三维量测,如果没有辅助另外的光学传感器数据而单纯利用机载激光雷达测量数据进行地物的分类和识别往往非常困难,甚至不可能实现。举例来说,要从数以万计的包含多种地物的激光点云数据集中提取独立房屋,首先,我们必须将属于房屋的激光点观测值探测出来(数据的分类),然后基于探测出的激光脚点以及应用其他数据源将房屋模型化。由于纯粹基于距离或高程数据进行内插非常困难,所以在记录激光数据的同时,还要能按时间顺序记录(Baltsavias,1999b)。
机载激光雷达测量技术是一种高新技术,该系统在高温条件下工作不太理想。目前的机载激光雷达测量系统功率大,操作较复杂,可靠性较差,系统成本造价高。而摄影测量系统操作更容易,更简单,也更可靠,系统成本造价便宜。机载激光雷达测量系统中激光器的使用寿命较短(主要取决于工作温度的高低),一般的Nd:YAG激光器的使用寿命为10 000h,而有些系统会随着长时间的使用,其性能指标迅速下降。相反,质量可靠的摄影相机能用数十年时间。目前,机载激光雷达测量系统在同时提供多光谱信息数据方面还不能同被动光学传感器相媲美(Baltsavias,1999b)。在相同的飞行高度和飞行速度,且航带间的重叠带宽一样的条件下,摄影测量(视场角为75°)拍摄的区域面积是机载激光扫描面积的2.9倍(Baltsavias,1999b)。两种技术的具体比较如下:
(1)生产DTM/DSM。对于机载激光雷达测量系统,一些随机商用软件可能提供从DSM到DTM的滤波算法。这些算法仅依据几何特性将房屋或树等地物过滤,该方法只适用于过滤相对平坦地区的独立房屋或树。在崎岖不平的山地,某些地形特征也可能被过滤掉,如山顶。另外,当激光脚点中地形点所占的比率偏小时,如林区的小块空地或建筑物密集区一条窄小的街道,那么这些地形点就有可能当成是非地形点而被过滤,而此时占多数的非地形数据反而被保留下来(Baltsavias,1999b)。为了从DSM中得到更为理想的DTM,除了利用几何信息之外,还要依据其他辅助信息,如多光谱数据、纹理等。由于每个国家对DTM的定义有所差别(如有些国家把桥划到DTM,有些国家将桥定为非DTM地物),因此,实际上全自动化地探测非地形地物的过程非常困难,有时甚至不可能(Baltsavias,1999b)。在使用机载激光雷达测量技术时,原始观测数据的采样密度及其分布就成为保证DTM/DSM质量和保真度的决定性因素(Baltsavias,1999b)。
(2)精度比较。机载激光雷达测量同摄影测量相比,所受的误差影响的因素更多,理论推导误差传播模型更为复杂。对摄影测量来讲,平面和高程相互独立,能分别加以考虑。另外,机载激光雷达测量中存在的常数项系统误差较摄影测量系统中的该项误差要大(Baltsavias,1999a)。机载激光雷达测量中,姿态误差对高程精度的影响会随着扫描角的增大而增大,尤其是飞行高度较高时。机载激光雷达测量系统供应商给出的精度统计较为乐观,高程方向的精度要高出平面精度2~5倍。一般来讲,在400~1000m的航高范围,摄影测量所获得的精度平均要比机载激光雷达测量获得的精度要略好一些。当然,有些时候后者比前者好,对于更高的飞行高度,如果姿态精度较高且有足够的激光回波能量,那么后者所获得的精度要比前者高(Baltsavias,1999b)。摄影测量所获得的平面精度要高出高程精度的1/3;而机载激光雷达高程方向的精度要高出平面精度的2~5倍,对机载激光雷达测量而言,在坡度较大的地方,平面位置的精度也会影响高程方向的精度(Baltsavias,1999a)。
(3)地形质量。尽管机载激光雷达测量的原始数据精度较高,密度也较大,但由此获得的DTM的地形质量并非总是令人满意的。因为机载激光雷达测量具有一定的盲目性,数据采样时并不能保证在关键地形点采样。除了缺乏明显的特征线或特征点模型外,最主要的原因还是用于过滤原始数据的滤波算法并非智能化的图像处理方法,有时不能区分要保留的地物脚点与需过滤的目标物体脚点。所以用机载激光雷达测量所获取的DTM往往较平滑,而且会丢掉一些重要的地形特征信息(Kraus,et al,1998)。在裸露地区,获取高质量DTM的最好方法还是传统手工航空摄影测量手段(Baltsavias,1999b)。
(4)生产时间。毫无疑问,机载激光雷达测量直接获取距离观测值,DTM的生产要比传统摄影测量快得多。
(5)成本。摄影测量的成本大家都非常清楚,而机载激光雷达测量生产同类产品的成本对大多数人来说还缺乏了解。该技术还处在开发应用阶段,市场也不稳定,所以有时为了吸引更多的用户,价格可能会定得较低。此外,每个供应商计算成本的方法也不同,并且他们彼此间还存在竞争。整个项目的成本主要取决于仪器厂家、测区大小、点的密度、后处理方式以及一些额外的开支等。就生产DTM而言,机载激光雷达测量要比摄影测量手段便宜不少。德国国家测绘局通过成本效益分析计算表明,对于同一项任务,用机载激光雷达测量技术实现的成本仅为用航空摄影测量技术实现成本的25%~33%(Reiche,et al,1997)。
当然,就将来的发展而言,机载激光雷达技术具有更大的发展潜力,它是一种新技术,还有许多发展空间,特别是在数据处理算法以及软件和系统的开发等方面。随着用户数量的增加,其应用领域将越来越广,特别是随着激光技术的进一步发展,将促进机载激光雷达测量技术的革新。如星载激光对地观测,包括军事方面的应用,这要求提高激光的测距和成像能力。系统还要能记录激光回波信号的特性参数(振幅、极性、相位、频移及垂直轮廓等),以大大提高机载激光雷达测量时物体分类和识别的能力。目前乃至将来一段时间,机载激光雷达测量和摄影测量将并存,相互补充,相互竞争,部分作业将由机载激光雷达测量取代摄影测量。未来的发展方向是多种传感器的高度集成和多源数据的融合处理,从而提高数据分类和物体识别的能力。机载激光雷达测量系统同被动光学传感器以及GPS/INS系统的集成,将给整个摄影测量领域带来一场新的技术革命。
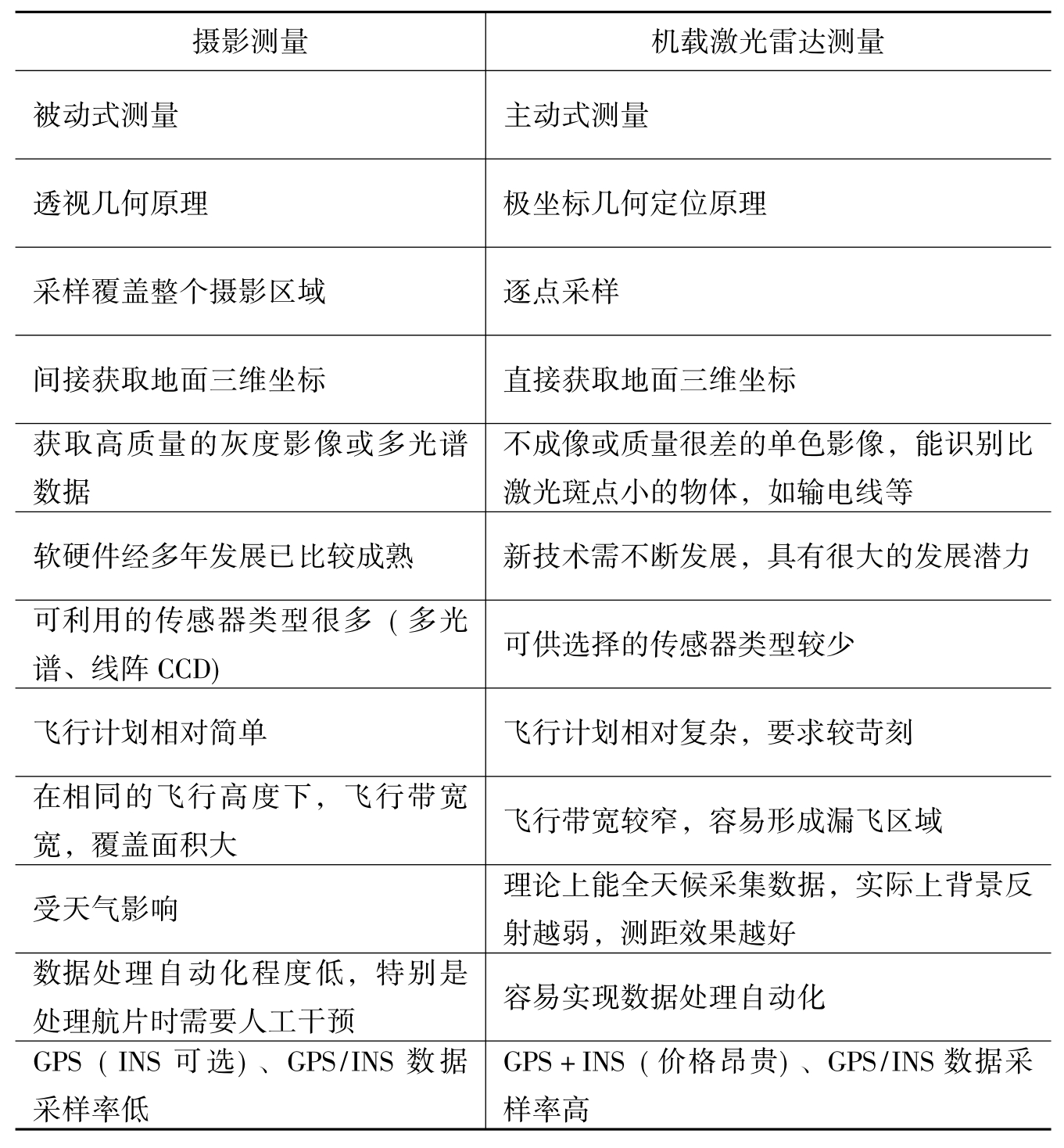
机载激光雷达测量技术同摄影测量间的综合比较见表2-2。
表2-2 机载激光雷达测量与摄影测量的主要区别
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。









