



4.4.1 数据质量控制
图4-11 DGPS水下定位系统中的浮标
水下声学导航定位系统定点测量数据可以采用数理统计的方法,通过中值平均法滤除测量结果中的异常数据,提高测量数据的集中度和平均值的符合度;而对于动态导航定位数据,可以采用卡尔曼滤波消除粗差,改善和提高导航定位结果。
1.定点测量数据质量控制
超短基线声学定位系统定位中,采集的数据包括GPS RTK测得的船位坐标(x,y)、应答器相对换能器的距离和方位、换能器的三个姿态角(Row、Pitch、Yaw),并通过计算得到海底应答器的三维坐标(x,y,z)。这些数据具有同步性、离散性、确定性、有限性等特点,其中主要处理的数据为海底应答器的三维坐标。
潜航器AUV/ROV或潜航员携带应答器为其进行定点定位时,应答器在一段时间内静止不动,以保证所采集数据的质量。因此,可以通过对应答器坐标采用数理统计分析方法提取出各种反映总体特征的真实信息。根据统计原理,测得的应答器坐标中的误差Δx和Δy均为独立变量,均应符合正态分布。因此,对采集的数据也可使用数学统计的方法进行处理。其典型特征量主要有位置特征量(数学期望值、算术平均值、中值、众值等)、离散特征量(极限误差、平均误差、相对误差、标准差、离差系数等)、相关系数及其显著性检验等。除了可以用上述各种统计特征值来概括和描述外,也可以用图示法和频率统计法来描述实测数据。基于上述方法,可实现超短基线定位系统定位解中粗差的剔除,以确保水下潜体的定位精度。
(1)潜航器位置的确定
每一个待测数据,可以假想存在一个“真值”。假设测量所得位置解中只存在随机误差,那么增加测量次数,使随机误差的分布符合正态分布,则所有测量值xi(i= 1,2,…,n)的平均值将随着测量次数增加而越接近“真值”。
![]()
(2)特征量的计算
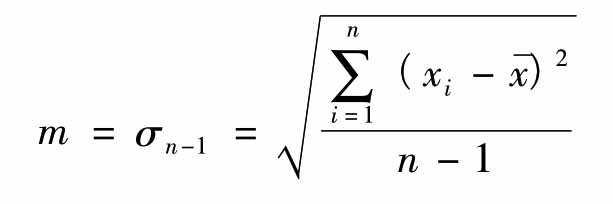
每一个数据与算术平均值的差值,称为偏差。当测量个数足够多(n→∞)时,取偏差平方和的平均值的平方根定义为总体分布的标准偏差(代表数据分布的精密度,或称离散程度),记为σn,在测量工作中也称标准差为中误差,计算公式为

而当测量个数有限多时,借助下式计算中误差。
对于某些观测量,如距离,单靠中误差还不能完全表达观测值的优劣,需要借助相对误差来反映。实际测量中,若应答器到换能器实测距离的中误差为Δs,实际距离为S,则二者的比值即相对中误差M可通过下式来确定。
![]()
M更能准确地描述水下声学导航定位系统的测距精度。
(3)粗差的剔除
通常当测量次数足够多时,测量数据的随机分布满足正态分布。
在大量等精度观测的数据中,误差落在(-σ,+σ)的概率为68.3%,误差落在(-2σ,+ 2σ)的概率为95.5%,误差落在(-3σ,+ 3σ)的概率为99.7%。通常以1倍中误差作为测量数据的精度,以2或3倍中误差作为测量数据的极限值即极限误差。
在测量数据中,如果其误差超过了极限误差,则认为它是粗差,相应的观测值应剔除,即采用如下原则进行粗差剔除:
![]()
式中,k取2或3。
(4)图示的方法
散点图是描述实测坐标数据的一种最简易、最直观的方法,可从图上一目了然地看出最大值、最小值、离散度、分布方式等,并且具有绘制简单的优点。
直方图也是一种常用的数据表示方法,适合于图示一维数据。绘制时,先将数据分成k组,落入第i组的数据个数记为ni。一般分为5~20组。
2.动态测量数据质量控制
前面阐述了潜航器静态或原地运动情况下数据质量的控制方法,而对其动态导航情况下的数据质量控制多采用卡尔曼滤波来实现。
在导航过程中,往往要求支撑船在计划航线上尽可能作匀速直线航行,然而作业船在海上不可避免地受风、流、浪、涌等各种因素的综合影响和驾船者经常性的实时修正,这不但使得支撑船的航迹呈不规则变化,还导致GPS、罗经、姿态等设备数据由于更新或重新稳定产生定位误差,而且还使得声学导航系统导航时的环境不稳定造成导航精度降低。常用的处理方法是建立测点与测点之间的函数相关模型,例如卡尔曼滤波模型,削弱定位误差,实现对测量数据的最佳线性估计。
卡尔曼滤波是一种最优化自回归数据处理算法,通过处理一系列带有误差的实际测量数据,最终得到物理参数的最佳估算。只要获知上一时刻状态的估计值以及当前状态的观测值就可以计算出当前状态的估计值,因此不需要记录观测或者估计的历史信息。卡尔曼滤波以最小均方误差为估计的最佳准则,采用信号与噪声的状态空间模型,利用前一时刻的估计值和当前时刻的观测值来更新对状态变量的估计,求出当前时刻的估计值。在水下测量中,人们感兴趣的是跟踪目标,但目标的位置、速度、加速度的测量值往往在任何时候都有噪声。卡尔曼滤波利用目标的动态信息,设法去掉噪声的影响,得到一个关于目标位置的最佳估计。这个估计可以是对当前目标位置的估计(滤波),也可以是对于将来位置的估计(预测),还可以是对过去位置的估计(插值或平滑)。
卡尔曼滤波具有如下特点:
(1)卡尔曼滤波数学模型不再是高阶的微分方程,而是一阶的(连续系统是一阶微分方程,离散系统是一阶差分方程),适合计算机处理;
(2)用状态转移矩阵来描述实际的动态系统,扩大了适用的范围,在许多工程领域中都可以使用;
(3)卡尔曼滤波的每次运算只要求前一时刻的估计数据和当前的量测数据,而不用存储历史数据,减少了对计算机存储的要求;
(4)卡尔曼滤波处理的对象是随机信号;
(5)被处理信号无有用和干扰之分,滤波的目的是要估计出所有被处理的信号;
(6)系统的白噪声和测量噪声不是需要滤波的对象,它们的统计特性是估计过程中需要利用的信息。
下面给出卡尔曼滤波的实施过程:
首先,引入一个离散控制过程的系统,该系统可用一个线性随机微分方程来描述。
X(k)= AX(k-1)+ BU(k)+ W(k)
系统的测量值:
Z(k)= HX(k)+ V(k)
以上状态方程和观测方程中,X(k)是k时刻的系统状态,U(k)是k时刻对系统的控制量。A和B是系统参数,其中A是作用在X(k-1)上的状态变换矩阵,B是作用在控制器向量U(k)上的输入-控制矩阵。Z(k)是k时刻的测量值,H是测量系统的观测模型矩阵。W(k)和V(k)分别表示过程噪声和测量噪声,均假设为高斯白噪声,其均值为零,协方差矩阵分别是Q、R。
然后,利用系统的过程模型来预测下一状态的系统。卡尔曼滤波器的状态由时刻k的状态估计 和误差相关矩阵
和误差相关矩阵 来表示。卡尔曼滤波器的操作包括预测和更新两个阶段。在预测阶段,滤波器使用上一状态的估计,做出对当前状态的估计;在更新阶段,滤波器利用对当前状态的观测值优化在预测阶段获得的预测值,以获得一个更精确的新估计值。
来表示。卡尔曼滤波器的操作包括预测和更新两个阶段。在预测阶段,滤波器使用上一状态的估计,做出对当前状态的估计;在更新阶段,滤波器利用对当前状态的观测值优化在预测阶段获得的预测值,以获得一个更精确的新估计值。
卡尔曼滤波模型在第8章中将给予详细介绍。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。









