



基于计算认知模型的航空差错原因分析
Michael D.Byrne,Alex Kirlik
摘要
我们提出了驾驶员-航空器-视觉场景-滑行道系统的闭环计算模型,可以清晰地显示滑行差错的可能原因。使用ACT-R对模型的认知模块进行建模,要求我们与有关专家合作探索驾驶员的经验在滑行阶段带入的改变。我们总结出了5种决断方法,范围从认知密集精确到精简且稳健。通过与NASA艾姆斯研究中心模拟芝加哥奥黑尔地面运行情况进行对比,我们对模型进行了验证。决断水平变化很大。在有可用时间的前提下,模型选取最精确的方法。研究发现模拟数据有这样的特征,即人们倾向于使用总体稳健的探索方法处理短时决断,由在非典型滑行道几何或指令路线上最经常发生差错可以看出这一点。这些数据为模型提供经验支持。
模型的目的不是处理数据而是突出问题(Samuel Karlin,1983)。
1 引言
调查航空事故和事故征候经常会发现人为差错源于认知因素和环境因素。环境因素包括有缺陷的界面设计(Degani,Shafto&Kirlik,1999)、自动化冲突(Olson&Sarter,2000)以及没有料想到的气象条件(Wiegmann&Goh,2001)。认知因素包括糟糕的情景意识(Endsley&Smolensky,1998)、不遵守程序(Bisantz&Pritchett,已付印)以及差劲的机组合作(Foushee&Helmreich,,1988)。
大部分重大事故和事故征候都源于认知因素和环境因素的某种组合。实际上,诸如航空这类高度程序化的行业,具有强化培训和动机明确的机组,单独因环境或认知因素导致的事故很少。培训和经验足以克服界面设计缺陷造成的混淆,同时环境通常都是冗余的、可逆的、容错的(Connolly,1999),因此大部分的失误和差错都不会引发严重后果。当认知因素、环境因素或者其他因素(比如组织因素)共同作用促发灾难时,大部分重大事故和事故征候就会发生(Reason,1990)。
鉴于此,越来越多的人为因素和航空心理学研究人员发现,“人为差错”和“驾驶员差错”这类最常见的术语将差错致因理论引入歧途(比如,Hollnagel,1998;Woods,Johannesen,Cook&Sarter,1994)。从它们的本性上看,这些术语将差错看成是人或者驾驶员的一种特性,与之相对的是我们已经知道许多操作差错是系统性的,由多重原因引发的。这些误导性的术语通常只会导致“培训和责备”的思考倾向,这种倾向在许多运行环境下仍然存在,并且可能导致在商业航空、军事行动和医疗等领域采取了干预措施却并不能改进安全状态。
差错的系统观点提出的挑战
虽然随着理论的进步,对差错的看法更加开明且系统,我们认为:基于系统观点开发人为因素干预方法最大的障碍是缺乏技术和模型;不能同时反映许多潜在因素是如何导致最终的差错;这些因素如何以动态、复杂和概然的方式相互影响。说多重致因要素“共同作用”促发差错是一回事,提供技术体现这些因素和它们“共同作用”的精确方式是另一回事。在事故调查领域这个问题很困难,但是至少有一些好的迹象(Rasmussen,1980;Wiegmann&Shappell,1997)。这一点对于差错预防和控制来说显得更具挑战性,也被认为是更加重要的(Hollnagel,2000)。
作为解决该问题的一次探索,本文阐述的研究开发了动态综合的计算认知模型和更具体地讲,驾驶员-航空器-场景-滑行道模型,以清晰地显示航空地面运行差错、滑行导航的可能来源。建模包括,将在ACT-R认知框架内开发的驾驶员模型(Anderson&Lebiere,1998;Anderson,Bothell,Byrne&Lebiere,2002)与航空器滑行动力学模型以及可视且可领航的机场道面(比如标识和滑行道)模型进行整合。
建模受到NASA艾姆斯高级概念飞行模拟机所做试验的启发(详见,Hooey&Foyle,2001;Hooey,Foyle&Andre,2000)。NASA试验的目的是更好地理解航空地面运行的差错来源,并评估那些降低差错事件的显示和通讯新技术(Foyle等,1996)。
认知系统建模研究的目的有两方面,一是评估那些缓解滑行差错的备选显示方案,二是评估和扩展计算认知建模用于人的表现和差错预测的最新进展。
2 问题:滑行差错和跑道入侵
在机场道面上导航时出现的差错有时会有严重后果,但并不总是这种情况。这类差错中的大多数飞行机组自己能发现并改正,还有一些由管制员发现并改正。另外,现代滑行道面全方位、多主体、带余度的容错特性使得许多未改正的错误不会导致严重的负面后果。但是,滑行导航过程中有些差错会导致灾难性的后果。
跑道入侵就是一种严重的差错,是指航空器或其他物体与起飞或降落,或者准备起飞或降落的另一架航空器发生碰撞危险的任何一种情况。1972年以来,跑道入侵事故致死719人,损坏飞机20架(Jones,2000)。尽管FAA和NTSB已经认识到了问题的重要性,计划用“机场活动区安全系统”等技术解决该问题(NTSB报告,2003),但是跑道入侵事故问题仍然继续恶化。例如,1996年、1997年和1998年美国跑道入侵的总数分别为287起、315起和325起。1999年,一架载有362名乘客的KAL客机在芝加哥奥黑尔机场(ORD)起飞时突然改变方向以避开冲入跑道的一架喷气式飞机。爱尔兰航空公司一架客机在JFK与误入跑道的一架喷气式货机差点相撞,停下时两机相距只有65m(Jones,2000)。
这些问题没有立刻消失的迹象。2002年美国总共发生337起跑道入侵,是10年前同期数量的1.5倍多。NTSB(2003)报告“尽管FAA致力于减少入侵,在2002年1月只有14起,但是2003年1月却达到了23起”(P.15)。部分由于到目前为止还是不能解决入侵问题,NASA正在开展航空系统安全项目应对这种或其他的航空安全问题。下一节中的NASA模拟和技术评估尝试着使用航空心理学和人为因素研究技术应对航空安全的关键问题。
2.1 模拟、试验和数据收集
这篇文章中称之为T-NAS2的试验需要18个飞行机组,由来自6个商业航空公司的特征驾驶员组成,在芝加哥奥黑尔国际机场(ORD)完成进近、着陆、滑行到停机门。各飞行机组对奥黑尔国际机场道面构形有不同的经验。试验条件包括两种,一种是基线条件(只使用当前的纸质航图技术),另一种是给驾驶员提供各种新显示和通讯技术,包括带有实体标识的(比如在停止点叠加“停止”标识)移动地图和平视显示。本次研究中的建模关注基本条件(当前技术)下的表现。
2.2 T-NASA2数据集
T-NASA2基本条件模拟试验使用9条不同的滑行路线。18个机组中的每一个要在有3条不同路线经均衡的子集上进行试验,试验总次数是54次。每次试验都是在距奥黑尔国际机场大约12nmile的平飞进近阶段开始。根据最终飞行阶段获得的许可信息以及纸质机场图表,驾驶员进行自动着陆,副驾驶通报机长,他们相对于跑道出口的位置。在飞机获准着陆跑道时,机组将无线电频率调到地面管制频率,管制员提供从当前位置到目的登机门的滑行指令(交叉和方向设置)。然后要求机组成员在不良的目视条件下(RVR1 000)模拟滑行到登机门。Hooey和Foyle给出了详细过程(2001)。应该注意的是,模拟并不能反映全部的标准操作程序(执行完着陆检查单后,记录和公司文书工作),也不能反映所有通信活动(客舱机组、签派和登机门)。因此,机组工作负荷低于机组在运行环境下经历的负荷,这就意味着对于差错而言试验情况接近于“最佳情况”而不是“最差情况”(不是指低能见度)。
54组基线条件T-NASA试验总共出现了12次偏离路线的导航差错。就每个差错来说,机组沿着错误的路线前行并没有立刻发现,同时地面管制也未要求改正。T-NASA2研究团队将这12次差错划定为“严重差错”。另外,还发现其他14次偏差,但是由机组发觉并进行修正。NASA团队将后面的14次偏差定义为“轻微差错”,并指示我们建模时关注严重差错。NASA为我们的建模小组提供每个严重差错的描述包括交叉口的复杂性和转弯的剧烈程度,并且从计划、决策制定或执行过程几个方面对每个严重差错进行了等级划分(Hooey&Foyle,2002;Goodman;2001)。
T-NASA2数据集的两个方面给目前的建模工作提供主要动力。首先,我们认为建模后可以清晰地看出试验模拟中发现的差错的潜在原因。第2个动力是这样的事实,TNASA2试验的新技术条件下使用导航辅助设施,再配合情景意识几乎能够完全消除导航差错(Hooey&Foyle,2001)。因此,我们把研究的目的定义为对发现的差错给出系统的解释。提高辅助导航信息的质量以后没有出现差错,解释应该与这个结果一致。
3 ACT-R建模:一般介绍
ACT-R是一种计算框架,用来支持人的认知和表现的详细建模过程(Anderson&Lebiere,1998;另见Anderson,Bothel,Byrne,&Lebiere,2002)。图1描述了系统的总体框架。由于系统输出的是时间标记的低水平行为流,比如个人的视觉注意转移、按键、诸如回想起一个简单事实等基本的思维过程,所以ACT-R可以对闭环中的人进行建模。为了开发系统,ACT-R必须提供两件事情:知识和操作在其中进行的世界或环境(通常模拟情况)。环境应该对ACT-R的输出做出动态反应,必须进行高逼真度模拟。提供给ACT-R用来完成一定环境下人的建模的知识主要有两类:陈述性知识和程序性知识。陈述性知识,比如“乔治华盛顿是美国的首任总统”,“IAH”代表休斯顿布什国际机场,用块状的符号结构表示。

图1 ACT-R认知框架
程序性知识,有时候是指“如何”知识,比如如何放下B747飞机起落架的知识,就储存在符号结构中,称为产生式规则或简言之产生式。这些结构由“如果-那么”配对组成,如果出现某种条件,那么执行这种或多种行动。另外,块状和产生式包含定量信息,反映特定知识的统计历史。例如,根据使用该特定块的频率和提取的新近性及其与上下文的关系,每个块涉及到一个数量,称作“激活”。由于通常不知道实际统计数据,许多情况下这些值遗留在系统默认项中,或者由建模人员进行评估,尽管原则上ACT-R也可以学习它们。
ACT-R的基本操作如下。系统的状态是通过一组缓冲器来反映。所有产生式的“如果”方面与那些缓冲器的内容相配。如果多重产生式匹配,使用一种称为冲突解决的程序决定启动哪个产生式或采用那么行动。一般来说,这至少会改变一个缓冲器的状态,然后会每50ms模拟时间重复一次此循环。另外,产生式没有明显改变它,缓冲器也可能产生变化。例如,有一种缓冲器反映当前视觉注意的目视物体。如果物体变化或消失,该缓冲器将会出现变化。即是说,不同的感官和机动过程(也包括公布的记忆)在彼此之间和中央认知产生式循环是同时进行的。采用各种逼真度对这些过程进行建模。例如,ACT-R并不包含高级的机器视觉部分,能够从类似光线输入中分辨出物体。在一定程度上,ACT-R需要提供注意目标的详细描述。
ACT-R最初用来对认知心理试验室试验的结果进行建模,被看做是解决人的认知和表现问题的“从底到上”或“首要原则”方法。ACT-R是否可以扩展应用于复杂领域是一个经验问题,但是目前在驾驶等动态领域运用得很好(Salvucci,2001),而且我们相信现在该方法已经足够成熟可以用于航空测试。
4 建立滑行过程的ACT-R模型
商业喷气式客机的滑行是一项复杂任务,驾驶员完成这项任务的ACT-R模型结构与多维度建模同样复杂。
4.1 建模范围
首先需要做出的决定是确定范围。一般而言,在滑行阶段,甚至在简单的NASA模拟过程中都会有各种类型的人。其中有机长,向上看窗外并操控飞机,副驾驶向下看给机长和地面管制员提供帮助。为了限定项目的范围,我们将模型设定在ACT-R的机长上,将地面管制员和副驾驶看成环境因素。我们认为这个决定能够平衡易处理性和关联性,因为机长做出最后的决策并控制航空器。
建模的第2个重要方面是选取关注的心理活动。我们的研究团队是许多相同的TNASA2数据认知建模团队中的1个(比如,见Deutsch和Pew,2002;Gore &Corker,2002;Liebiere,Bielfeld,Archer,Archer,Allender&Kelley,2002;McCarley,Wickens,Goh&Horrey,2002)。在这方面,我们与其他研究团队采用的不同方法相对照,探索ACT-R方法的优点和缺点,目的是为整个研究做一些特别的工作。例如,我们不研究多重任务,是因为在该领域ACT-R比其他模型显得更不成熟。我们也不研究情景意识(Situation Awareness,SA)问题(迷失在机场道面的位置),是因为这是另一个团队的核心内容(Wickens等,2002)。考虑到所有事项,包括以前我们在人为表现建模上的经验(比如,Kirlik,1998;Kirlik,Miller&Jagacinski,1993),我们决定研究闭环中促成任务完成的交互且动态决策。因此,我们集中研究差错原因要素,这些要素源于任务环境结构的交互效应以及根据因记忆指令信息衰退、能见度低、航空器动态缓慢造成的不完善信息做出快速决定的需要。
4.2 模型的环境
我们给出了驾驶员的ACT-R模型,但驾驶员模型仍然需要置于精确的环境中。本次研究对3个外部输入进行建模以反映环境:由驾驶员模型控制的模拟飞机;用于驾驶员模型的模拟视觉信息;模拟飞机经过的模拟跑道和滑行道。这三个环境输入项使用计算建模,融合了驾驶员模型的认知部分,能够全面反映交互影响的人-机-环系统。
遗憾的是,用来驱动实际的NASA飞行模拟机(可以从中收集表现数据)的动力装置动态代码不可用。因此,我们需要建立一个简单的动力车辆模型,使得驾驶员模型能与之进行交流。但是,即使给出了动力车辆的尺寸、重量和动力学数据,我们依然需要对试验中的航空器实际动力学给出合理的近似估计以解决计时问题。尽管我们并不关注控制问题本身,但是航空器的动力学在判断决策时间范围上起重要作用,是反映驾驶员认知活动的关键因素。在我们建立的航空器模型中,驾驶员以3种方式控制模拟飞机:应用发动机功率,刹车和转向。对于航空器滑行建模的目的,这3种控制方式已经足够了。根据Cheng,Sharma和Foyle(2001)对NASA模拟飞机动力学的分析,我们给出了模型,该模型合理地假设油门和刹车输入可以产生与航空器速度线性相关的作用力。
但是,转向操纵是另外一回事。考虑到该操纵输入在T-NASA2场景中具有的功能的作用,我们做出决断,假定如果人工控制的操纵转向问题在观察到的导航问题中不是重要方面,然后就可以解决操控动力学问题。即是说,我们假定制定正常次序做一个正确的转弯只是一个做出决策的问题,没有正确次序转弯决策引起的次序差错都是对正确执行的执行错误引起的转弯差错。需要注意的是,这种假设并不会完全分离模型的人工和认知内容方面。模型中人工控制的加速和刹车动作仍然决定航空器相对紧接转弯的位置。更重要的是,限制了航空器每次进近入转弯的最大速度。
计算NASA模拟中不同类型转弯飞机最大速度时,考虑到乘客的舒适性以及Cassell,Smith和Hicok给出的机场数据(1999)侧向加速度限制为0.25g(Cheng等,2001)。在我们的模型中,温和(转向)转弯速度为20kts(节)[1],右转为16kts,U型转弯为14kts,同时这些速度也是根据ORD滑行道布局的实际转弯半径测出来的。最大允许速度部分地决定可用于转弯的时间,在我们的模型中时间减少了更容易做出错误的转弯决定。简化的转向操作过程可概括为,一旦模型决定如何转弯,就能正确无误地执行该转弯。
为了实现模型的这些简化,我们决定将ORD机场滑行道设定为一系列互相连接的轨道,模拟飞机的行走路线都限定在这些轨道上。在试验中滑行道上做出决定可以简化为在每个滑行道交叉口选择合适的轨道。照这样,我们不需要对航空器转弯的动力学进行建模,只需要沿着转弯轨迹以转弯半径相应的速度移动航空器。
NASA飞行模拟机的软件库给出了模型,可以代表我们用在ACT-R驾驶员模型上的视觉信息。数据库包含ORD道面上的位置代码物体(比如,滑行道,标识等),或者至少是NASA试验对飞行机组呈现的那些物体。模型中驾驶员能够看清的远处物体,同样的距离同样的物体在T-NASA2试验中驾驶员也能看清。
4.3 驾驶员背景知识的建模
显然,理解这项研究中驾驶员的表现最为重要的两个方面是环境和动态属性,但是它们并不完全决定驾驶员的行为,因此使用基于知识的表现模型,比如ACT-R。就像前面提到的,ACT-R模型必须提供如何完成这项任务的知识。构建模型过程的这一部分通常被称为“知识工程”,因为在这类领域中收集和组织完成任务所需要的知识是重要的。我们的研究工作集中在该领域内程序的辨识,驾驶员使用的问题解决方法,包括这些程序和方法的代价-收益结构。
4.4 任务分析和知识工程
通过研究各种滑行任务分析(比如,Cassell,Smith&Hicok,1999),大量咨询从事过航线驾驶的主题专家(Subject Matter Experts,SMEs),获取构建模型所需的任务信息。我们首先会发现,在许多情况下,滑行时驾驶员有多重任务。基于此发现,我们的ACT-R模型研究仅涉及在迫近决策时导航决策的制定。在过渡期间,模型反复执行涉及航空器安全的4项核心任务。
这4项任务包括:目视监控入侵物,尤其是在低能见度下难以探测的地面车辆这类物体,视觉场景的监测;保持航空器速度,因为商业喷气式客机的动力学经常要求调整油门和/或刹车以维持恒速;听地面管制员的等待指令;更新航空器滑行道的道面位置和目的地位置的表达。尽管这些任务通常不会直接影响导航,但是需要花时间去完成,而时间是我们的综合驾驶员-航空器-环境系统模型中做出导航决定时的关键有限资源。
谈到导航决定,我们发现做出决定的过程很有限。也就是说,计划过程很短;着陆后飞行机组很忙,在ORD能见度低的情况下,他们没有时间“提前计划”考虑转弯或交叉情况,除非是马上就要处理的那项任务。另外,决策过程是分层次的,驾驶员首先需要考虑是否在下一个交叉口转弯,如果转弯的话再决定转向哪边。在我们可以获得的差错集合中,我们发现第一个决策的差错(转弯还是不转弯)很少,因此我们着重研究驾驶员如何做出第2个决定。
首先要提到的问题是,真实的驾驶员在NASA研究案例中驾驶员经历的那种情况下会采用哪种知识和策略。通过走访许多SME,我们找到了若干驾驶员采用的重要方法,同时发现大部分这些方法不适用于NASA研究中的参与者。这里面的许多方法涉及地面管制员和其他航空器之间的开放通讯。例如Qantas1132号航班得到的指令与联合航空公司的302号航班得到的指令重复,切实可行的方法是联合航空公司的驾驶员跟在Qantas飞机后面。
同时,驾驶员可以使用不同的指令排除某种决策选择。例如,面对交叉口时,要求驾驶员在A10和D滑行道之间进行选择,如果驾驶员听到另一架飞机得到指令涉及A10,那么很可能会选择D,因为地面管制员不可能安排从不同方向来的两架飞机滑向同一条滑行道。
在任务分析和SME访谈的最后,我们确定了如下用于转弯决策的5个主要方法。
(1)记住正确的指令。尽管很快,这种方法随着时间间隔增加会越来越不准确,间隔指的是获取指令给出的转弯清单的时刻到实际上要求转弯的时刻之间的时间推移。
(2)转向登机门。尽管比第一个办法要慢一些,这种方法在许多机场准确度水平都很合理。
(3)朝减少航空器和登机门之间X或Y(驾驶舱定方向)距离的方向转弯。我们认为这种方法中度快,好比方法(2),但是由于要考虑更多因素准确度高于方法(2)。
(4)由地图/空间知识推断。这是最慢的方法,只有经验丰富的飞行机组(在给定的机场)才能获得很高的准确度。
(5)随机猜。这个方法非常快,尽管不大可能非常准确,尤其是在多转弯的交叉口。但是,我们把它包括在模型的可能方法中,原因有两点:一是在某些情况下给定可用决策时间这可能是唯一的方法;二是它能洞察随机表现水平。
建模的下一个问题是作出有时间约束的决定时,如何选择方法。
使用冲突解决机制ACT-R对这种决策进行建模,可以判断多重产生式与当前情形的匹配情况。方法(1)(回想指令)和方法(4)(源于地图知识)的准确性是这些任务要求的原始认知操作准确性的函数。原始认知操作的准确性受ACT-R记忆衰退和工作记忆约束等因素调控。但是,方法(2)、(3)和(5)的准确性受认知的约束较少,关键取决于实际指令路线和滑行道的几何结构。因此,我们聘请一名SME参与研究以提供数据用于分析判定探索方法(2)和方法(3)(随机猜,方法(5)的准确性取决于滑行道本身的几何结构)。
在这项研究中,SME,美国某大型航空公司的B767在职飞行员,可以使用美国所有大型机场的杰普逊航图。由于SME有着丰富的滑行经验,要求他选择这些机场的航图,同时还要求他用荧光笔在航图上画出每个机场从接地到公司的登机门区域可能或者期望的滑行路线。我们可能没有考虑过,进行该项试验时ACT-R模型并没有要求我们采用驾驶员决定滑行过程中如何转弯的高水平方法,也并没有要求我们考虑相关的代价(要求的时间)和收益(准确性)。
5 滑行决策探索研究
为了获取那些模型要求的信息,我们为SME提供了美国所有大型机场的杰普逊航图,鉴于他在滑行路线和指令方面的丰富经验,要求他为那些他有经验的机场选择杰普逊航图。他选出了9个机场(DFW,LAX,SFO,ATL,JFK,DEN,SEA,MIA,ORD)。SME使用航图荧光笔在每个机场画出从接地点到其公司的登机门的可能或者期望滑行路线。采用这种方式总共画出了284条路线。
到这一步,我们的目的是确定在任务分析和知识工程过程中认定的探索方法能否做出准度水平可以接受的决定。使用SME给出的9个机场的数据,我们比较了这些探索算法给出的预测,得到了探索方法(2)(转向公司的登机门)和方法(3)(朝减少当前位置和登机门之间X或Y轴最大间距的方向转变)的准度估计值。我们认识到,由于其他公司的登机门会分布在9个机场的不同区域,与我们的SME的经验基础相比,那些驾驶员得到的指令从直觉的几何结构来说或多或少更复杂,因此那些准度估计值特指SME所在的(大型)航空公司。但是,我们相信,这次研究得到的结果会突显出在复杂的操作环境下简单快速且简短的决策探索方法(Gigerenzer&Goldstein,1996)具有令人惊奇的高准确度。

图2 “到航站楼”和“减少XY间距中的最大值”探索方法的准确性
图2显示的是这两个探索方法效能分析的结果。可以看到,在许多美国的大型机场,XY探索方法效能很好,甚至更简单的“到航站楼”探索方法的准度也很合理。因此,按照前面提到的5个方法,包括图2给出的2个极为简短和稳健的“到航站楼”和“XY”探索方法,我们给出了驾驶员决策模型的转弯决策模块。可以认为这5个方法是按照它们的代价(时间要求)和收益(准确性)进行等级划分的。认知模型中决策模块的功能就是选取在允许的决策时间内实现最高准度的方法。
动态决策模型的详细描述从时间代价考虑,选择决策方法时需要估计做出决定之前的可用时间。可用时间取决于航空器到交叉口的距离以及确保可以转弯而放慢的速度大小,这与航空器的动力学相关。回想一下,我们提到了一个算法能够计算对应给定类型转弯的最大转弯速度。计算可用时间时,假设每个交叉口的情形最糟。做出决策的时间范围取决于交叉口的距离和航空器动力学的知识,根据这些信息确定踩刹车是否可充分减缓航空器的速度以实现对应交叉口的最急转弯。
在ACT-R中不能计算“可用时间”(也就是说,我们没有建立一个驾驶员如何估计这一时间的认知模型),但是ACT-R可以调用外部运算子程序,这样模型能够判断在特定情况下5种决策方法中的哪种可用。我们认为驾驶员估计这些时间的能力是有缺陷的,所以在基于航空器模型的计算结果中加入噪声影响,这样得到的结果在真实可用时间的80%到120%之间。
每个转弯决策方法都有一个产生式规则,只有模型用来执行程序的平均时间比决策范围少0.5s以下时,才允许给出冲突解决方案。使用这种比较保守的方法是为了补偿时间估计和方法使用时间上的随机误差。符合这个准则的那些产生式以ACT-R标准冲突解决程序稍加修订的形式相互竞争。在默认的ACT-R程序中,使用PG-C值估计每个产生式的使用情况,其中P是选择的产生式的成功概率,G是时间常数(默认值是20s),C是该产生式如果激活到得出结果所用的时间。只要时间代价小于可用时间,由于时间代价在这一应用中不相关,就可以去掉这一项,但是若产生式的时间代价包含在可用的0.5s内,对该产生式要惩罚1s,再一次采取了保守的做法以确保选取那些肯定能完成的决策方法。ACT-R中假设每个产生式的应用都有噪声项,因此不可能确保系统选取的方法具有最高的PG-C值。这种情况下有两处噪声来源,可用时间的评估和方法自身的效用。
在驾驶员模型中,根据每个决策方法的实际成功概率估计每个产生式的P值。因为方法的成功率取决于SME研究,起动“转向登机门”的产生式P值是80.7%。其他两个决策方法(上面的(3)和(5))的P值计算采用同样的方式,方法(1)(回想实际的指令)和方法(5)(源于地图)的P值由ACT-R认知结构固有的有界推理认知机制确定。整个模型建好了,我们可以启动Monte Carlo模拟(50个时间范围的每一个重复300次)以可用时间为横坐标得到每种方法的概率,模拟结果见图3。
从图3可以清楚地看到,随着决策范围的减少,驾驶员模型更有可能选取不准确方法。但是,这一点可以看作是适应,因为快速且简短的方法能够完成,经常显现出比那些受时间限制需要裁剪的具有更好分析优越性的决策方法表现更好(Gigerenzer&Goldstein,1996)。因此,这些结果也就不足为奇了,但是确实需要认识到,减少差错需要新的决策方法,评估这些策略效果将以更简短探索算法的适用性为依据。这些更加简短的探索算法或许相对稳健,但是当这些探索算法中的环境规则不能满足时就会失效(Reason,1990)。例如,模型显示“转向登机门”试探算法需要大约2.5s,计算准度为80%。理性的驾驶员不会喜欢这种探索算法开发出的新方法或技术,除非新的决策方法的收益/代价比远远高于这种“快,但是不干净的”方法。
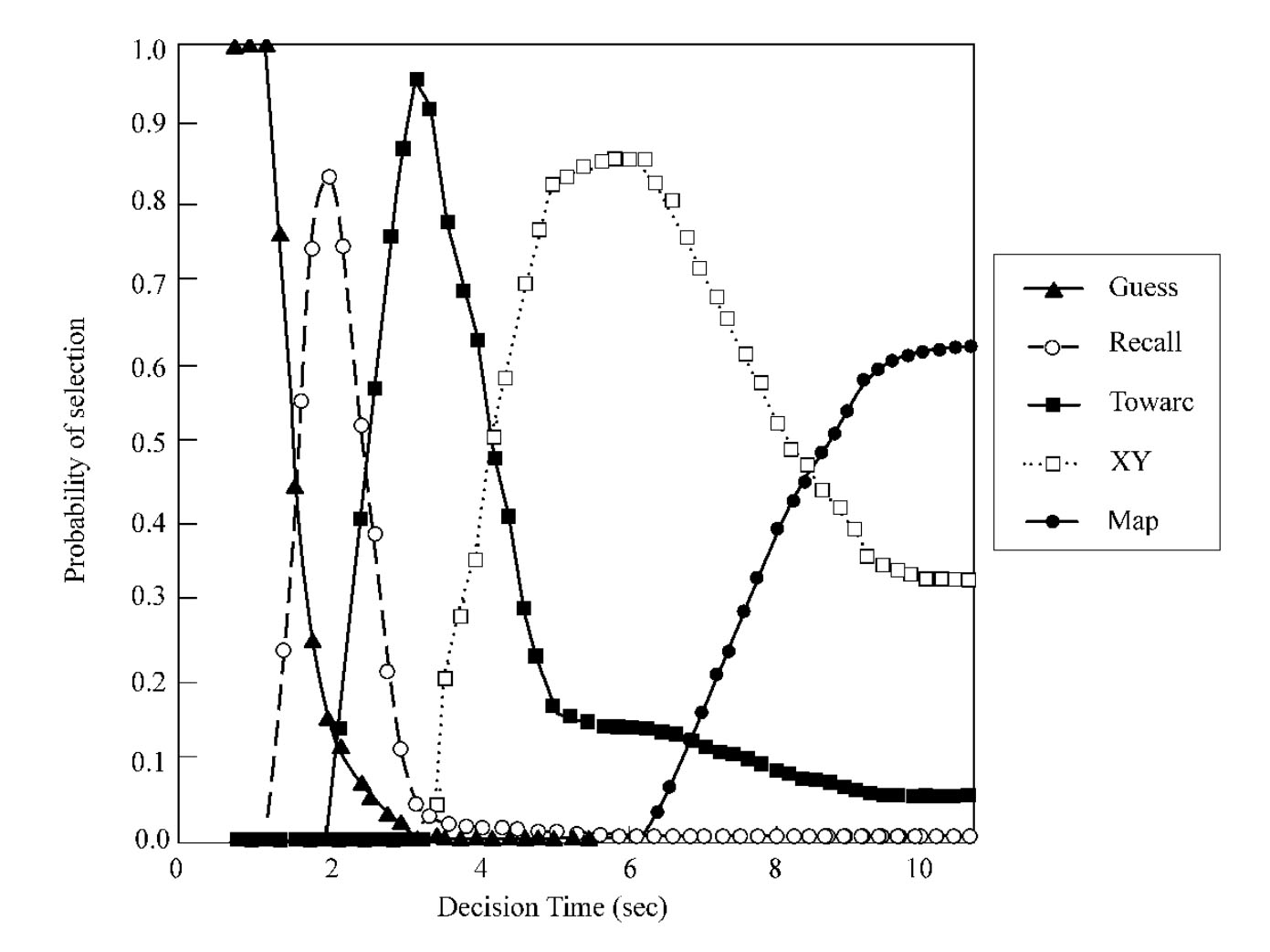
图3 决策时间限制下每种决策方法的选用概率
6 经验验证
当前很关注的一个方面是使用恰当的技术核实和验证基于计算机认知建模的人的表现模型(见Leiden,Laughery&Corker,2001),可以公平地讲这方面还没有统一的标准。下面我们将给出两种经验证据支持驾驶员-航空器-视觉场景-滑行系统的动态综合计算模型。第一种验证是以交叉口类型为自变量综合分析滑行导航差错的出现频率。第二个方法是对差错逐一进行更加细致的分析。
6.1 启发式决策探索方法可靠性的总体证据
T-NASA基本场景使用了9条不同的滑行路线,分离的交叉总共有97个。由于每条路线要用6次,基本试验总共出现了582次交叉。像前面提到的,仅有12例观察到机组严重偏离已给线路,使得差错率(每次交叉,而不是每次试验)约为2%(Goodman,2001)。
就像Goodman(2001)报告的,在582次交叉口穿越中,指令指出机组应该朝登机门方向滑行的情况有534起(91.8%),而指令指示机组朝登机门反方向滑行的情况只有48起(8.2%)。将这一信息与模型中“到航站楼”和“XY”探索的预测对照,我们发现在TNASA2场景下指令路线与这两个探索方法有冲突的情况下,97个线路交叉的每个至少会出现一次滑行差错。这些差错占到了所有12个滑行差错中的7个。
另外,就像下文讨论的,12个滑行差错中另外4个的原因不是决策制定,而是失去了情景意识或者SA(比如,在机场道面上不知道自己的位置,见Goodman,2001&Hooey&Foyle,2001),这是超出当前建模范围的认知现象。建模的时候我们假设位置了解(失去SA)不是导致滑行差错的主要原因,主要原因是时间压力下做出决定以及称为“违反直觉”的交叉口和指令(比如,因为几何结构或指令不典型导致“到航站楼”和“XY”探索方法失败)。
6.2 启发式决策探索方法可靠性的局部证据
Goodman(2001)的报告详细分析了基本试验条件下T-NASA试验中发现的12个滑行差错中的每个。下面我们依次简短地介绍每个差错。当我们使用词语“分类”时,指的是Hooey和Foyle(2001)采用的术语,对于那些我们认为给出了模型验证,尤其是在时间压力下做出决定的“快速且简短”决策探索的差错用黑体标出。对于那些因为丧失SA导致的差错,比如超出我们的研究范围,给定初始建模关注点,对模型既不起支持作用也不起反对作用,我们用斜体标出。下面的文字皆引自Goodman(2001)。
差错1:当给出指令远离登机门时模型中的机组却转向登机门,这种差错定为“决策”(与“计划”或者“执行”相对)差错。
差错2:与“不知道机场布局和廊道位置”有关,这种差错也定为决策差错。我们将这种差错归因于SA丧失。
差错3:“机组声称由于要远离廊道Tango就显得没有意义”,这种差错定为“计划”差错。他们转向目的登机门。
差错4:感知混淆中心线,机组过早转向廊道,这个差错定为“执行”差错。
差错5:通话显示机组知道正确指令,但是他们却过早转向登机门,这个差错定为执行差错。
差错6:机长声称线路混淆,却过早地转向靠近目的登机门的停机坪区域,这个差错定为执行差错。
差错7:副驾驶口头上遗漏了指令中向Foxtrot中间转弯,但是“转向Foxtrot驾驶员会远离廊道,副驾驶认为应该转向廊道Alpha”,这个差错定为计划差错。
差错8:滑出跑道后机组立刻转向登机门,但是指令要求远离登机门的转弯,这个差错定为决策差错。
差错9:副驾驶声称难以理解中心线,这个差错定为执行差错。机组过早(1-登机门)转到廊道区域,但是指令要求他们在转向廊道之前应该继续向前滑行。
差错10,11和12:这三个差错都定为丧失情景意识,副驾驶“低头看杰普逊航图并没有认识到他们在机场道面上的位置”(差错10),机组“声称不清楚机场布局”(差错11),“副驾驶不清楚他们在机场道面上的位置”(差错12)。
6.3 总结
显然,T-NASA2试验中的差错是由于糟糕的情景意识和转弯决策制定引起的。就像前文提到的,我们的建模努力集中在与决定相关的差错,与情景意识相关的差错是其他建模过程关注的。总之,根据上面给出的经验结果,我们认为我们的模型有合理的良好的经验支持。
7 结论
研究结果很理想,鼓励我们继续开发动态的航空环境下人为表现的计算机认知模型。我们认为T-NASA场景下发现的差错符合我们对信息不足、动态决策以及包含在ACTR模型框架中的机制分析得到的结论。就这一点而言,我们认为ACT-R中的认知观点,有条件地适用于先前经历的任务环境的统计和代价-收益结构,从这项研究也得到了一定的支持。
T-NASA2中滑行差错分析的关键是驾驶员有很多方法处理各个转弯决定,在时间允许的情况下可以使用最准确的方法(比如,Payne&Bettman,2001)。当时间很短时,以不良的能见度、工作负荷和航空器动力学为自变量,模型假设驾驶员趋向于依赖计算更方便却不特定的信息,这些信息可以从当前决策为其事例的各种情况下的经验中获取。。在TNASA2场景下,这种更一般化的信息符合典型的滑行路线和指令,可以在美国的大型机场从接地点到登机门看到。
这一描述也符合以下事实:通过为辅助决策提供改进信息,在T-NASA2试验中的高技术条件下使用成套的显示辅助设施可以有效地减少滑行差错。我们希望该研究能够促使更多的人为因素和航空心理学研究人员使用计算机认知模型的新技术研究人的表现。我们认为动态综合的人-机-环境系统的详细建模技术,为应对复杂操作系统中出现的差错致因系统观点提出的挑战带来了希望。
致 谢
该研究受NASA艾姆斯NCC2-1219,莱斯大学NDD2-1321以及伊利诺伊大学NAG 2-1609的合同资助。作者感谢作为主题专家的Bill Jones和Robert机长,莱斯大学的Brian Webster、Michael Fleetwood和Chris Fick。我们感谢T-NASA研究团队提供的时间、数据和专业知识,尤其是David Foyle、Tina Beard、Becky Hooey和Allen Goodman。
参考文献
Anderson,J.R.,Bothell,D.,Byrne,M.D.,Lebiere,C.(2002).An integrated theory of the mind.Manuscript submitted for publication.Available at http://actr.psy.cmu.edu/papers/403/IntegratedTheory.pdf
Anderson,J.R.,Lebiere,C.(1998)The atomic components of thought.Mahwah,NJ:Lawrence Erlbaum.
Bisantz,A.M.&Pritchett,A.R.(in press)Measuring judgment in complex,dynamic environments:A Lens Model analysis of collision detection behavior.Human Factors.
Cassell,R.,Smith,A.,Hicok,D.(1999).Development of airport surface required navigation performance(RNP).NASA/CR-1999-209109.
Cheng,V.H.L.,Sharma,V.,Foyle,D.C.(2001).Study of aircraft taxi performance for enhancing airport surface traffic control.Manuscript accepted for IEEE-ITS publication.
Connolly,T.(1999).Action as a fast and frugal heuristic.Minds and Machines,9,479-496.
Degani,A.,Shafto,M.&Kirlik,A.(1999).Modes in human-machine systems:Review,classification,and application.International Journal of Aviation Psychology,9(2),125–138.
Deutsch,S.&Pew,R.(2002).Modeling human error in a real-world teamwork environment.Proceedings of the 24th Annual Meeting of the Cognitive Science Society(pp.274-279).Fairfax,VA.
16Endsley,M.R.,Smolensky,M.W.(1998).Situation awareness is air traffic control:The big picture.In M.W.Smolensky &E.S.Stein(Eds.),Human factors in air traffic control.San Diego,CA:Academic Press.
Foushee,H.C.&Helmreich,R.L.(1988).Group interaction and flight crew performance.In E.
L.Wiener &D.C.Nagel(Eds.),Human factors in aviation.San Diego:Academic Press.
Foyle,D.C.,Andre,A.D.,McCann,R.S.,Wenzel,E.,Begault,D.&Battiste,V.(1996).Taxiway navigation and situation awareness(T-NASA)system.Problem,design,philosophy,and description of an integrated display suite for low visibility airport surface operations.SAE Transactions:Journal of Aerospace,105,1511-1418.
Gigerenzer,G.&Goldstein,D.G.(1996).Reasoning the Fast and Frugal Way:Models of Bounded Rationality,"Psychological Review,103,650-669.
Goodman,A.(2001).Enhanced descriptions of off-route navigation errors in T-NASA2.NASA Ames Research Center,Moffett Field,CA.
Gore,B.&Corker,K.M.(2002).Increasing aviation safety using human performance modeling tools:An air man-machine design and analysis system application.In M.J.Chinni(Ed.),2002Military,Government and Aerospace Simulation,34(3).183-188.San Diego:Society for Modeling and Simulation International.
Hollnagel,E.(1998).Cognitive reliability and error analysis method.Oxford,UK:Elsevier.
Hollnagel,E.(2000).Looking for errors of omission and commission or The Hunting of the Snark revisited.Reliability Engineering and System Safety,68,135-145.
Hooey,B.L.&Foyle,D.C.(2001).A post-hoc analysis of navigation errors during surface operations.Identification of contributing factors and mitigating strategies.Proceeedings of the 11th Symposium on Aviation Psychology.Ohio State University,Columbus,OH.
Hooey,B.L.,Foyle,D.C.&Andre,A.D.(2000).Integration of cockpit displays for surface operations:The final stage of a human-centered design approach.SAE Transactions:Journal of Aerospace,109,1053-1065.Warrendale,VA:SAE.
Jones,D.(2000).Runway incursion prevention system(RIPS).Presentation to the SVS CONOPS Workshop,NASA Langley Research Center,February 23,2003.
Karlin,S.(1983).11th R.A.Fisher Memorial Lecture,Royal Society,London.
Kirlik,A.(1998).The ecological expert:Acting to create information to guide action.Fourth Symposium on Human Interaction with Complex Systems.Dayton,OH:IEEE Computer Society Press.http://www.computer.org/proceedings/hics/8341/83410015abs.htm
Kirlik,A.,Miller,R.A.,Jagacinski,R.J.,(1993).Supervisory control in a dynamic uncertain environment:A process model of skilled human-environment interaction.IEEE Transactions on Systems,Man,and Cybernetics,23(4).
Lebiere,C.,Bielfeld,E.,Archer,R.,Archer,S.,Allender,L.,Kelly,T.D.(2002).Imprint/ACT-R:Integration of a task network modeling architecture with a cognitive architecture and its application to human error modeling.In M.J.Chinni(Ed.),2002Military,Government and Aerospace Simulation,34(3).13-19.San Diego:Society for Modeling and Simulation International.
Leiden,K.,Laughery,R &Corker,K.(2001).Verification and validation of simulations.Unpublished report available from:https://postdoc.arc.nasa.gov/postdoc/t/folder/main.ehtml?url_id=90738
McCarley,J.S.Wickens,C.D.,Goh,J.,Horrey,W.J.(2002).A computational model of attention/situation awareness.Proceedings of the 46th Annual Meeting of the Human Factors and Ergonomics Society(pp.1669-1673).Santa Monica,CA:Human Factors and Ergonomics Society.NTSB Reporter(2003).Runway incursions.Vol.21,No.3.
Olson,W.A.&Sarter,N.B.(2000).Automation management strategies:Pilot preferences and operational experiences.The Int'l Journal of Aviation Psychology,10(4),327-341.
Payne,J.W.&Bettman,J.(2001).Preferential choice and adaptive strategy use.In G.
Gigerenzer &R.Selten(Eds.).Bounded rationality:The adaptive toolbox(pp.123-146).Cambridge,MA:MIT Press.
Rasmussen,J.(1980).What can be learned from human error reports?In K.D.Duncan,M.M.
Gruneberg,D.Wallis(Eds.),Changes in working life(pp.97-113).Chichester,UK:Wiley.
Rasmussen,J.(1988).Cognitive engineering,a new profession?In L.P.Goodstein,H.B.
Andersen,and S.E.Olsen(Eds.),Tasks,errors and mental models.London:Taylor Francis.
Reason,J.(1990).Human error.Cambridge,UK:Cambridge University Press.
Salvucci,D.D.(2001).Predicting the effects of in-car interface use on driver performance:An integrated model approach.International Journal of Human-Computer Studies,55,85-107.
Wiegmann D.A.&Goh,J.(2001).Pilots'decisions to continue visual flight rules(VFR)flight into adverse weather:Effects of distance traveled and flight experience(Technical Report ARL-01-11/FAA-01-3).Savoy,IL:University of Illinois,Aviation Research Laboratory.
Wiegmann,D.A.&Shappell,S.A.(1997).Human factors analysis of post-accident data:Applying theoretical taxonomies of human error.The International Journal of Aviation Psychology,7(1),67-81.
Woods,D.D.,Johannesen,L.J.,Cook,R.I.&Sarter,N.B.(1994).Behind human error:Cognitive systems,computers and hindsight.Columbus,OH:CSERIAC.
【注释】
[1]*1kt(节)=0.51m/s=1.152mph
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。










