



7.4 根轨迹分析法
系统的性能取决于由电路结构和器件参数决定的传递函数,而系统的传递函数的本质特征在于复平面内的零点、极点位置及其所决定的零点、极点频率,以及直流下与频率无关的信号传递即直流增益。通常对于低阶系统,尤其是开环系统,其传递函数即开环系统零点、极点的求解相对简单明了,而且对于物理可实现的开环因果系统,本质上都是收敛或稳定的。然而,当开环组成闭环系统后,与开环零极点相关的闭环零极点将发生变化,这种变化既与开环增益自身的结构性质有关,同时也与反馈网络的性质有关。
7.4.1 根轨迹原理
Bode图分析是一种利用开环零极点分析闭环频率特性及闭环系统稳定性的一种行之有效的方法。其特点在于物理概念清晰、方法简单、结果明确;不足之处在于该方法仅对简单的常系数反馈闭环系统适用,不适合含相位迟滞的复杂反馈网络的闭环分析,并且电路参数变化引起对闭环零极点变化的影响,难以清楚描述。
根据闭环特征多项式的系数,采用劳斯判据等相关准则,在无需求解闭环极点具体位置的前提下,即可判定系统的稳定性质。然而,一个稳定系统对不同输入激励下的响应特性分析,则需进一步掌握系统零极点的相关性质。通常对于高阶系统,直接求解极点是一件十分困难的工作。根轨迹法则是采用直接图解分析技术确定极点的可能变化范围,为高阶闭环系统的稳定性和瞬态响应特性的分析提供另一种行之有效的方法。与传统的Bode图频率特性的分析相类类似,通过对开环零极点位置的分布及相互关系分析,确定闭环极点位置的分布状态,从而确定闭环系统的频率特性和系统稳定性。两种分析方法所得的结果完全相同,其中根轨迹法虽然数学分析过程相对复杂,并需依赖开环传递函数或开环零极点的分布。但此法提供的信息量更大,能够清楚地了解电路及器件参数变化对闭环系统零极点的影响。
对于环路增益为T(s)的闭环负反馈系统,闭环极点满足的特征方程为T(s)=A(s)F(s)=-1+0j,这对应于T(s)必须满足以下相位和幅值条件,即
∠T(s)=(2k-1)π,|T(s)|=1 (7-55)
式中k为整数,表明闭环极点的相位为π的奇数倍。根据相位条件可判定根轨迹的可能范围,再由幅值条件进一步确定闭环极点的具体位置。根轨迹范围判断的关键在于实轴区域上的根轨迹范围,再由此扩展到整个s复频域。
对于实轴上满足相位条件的根轨迹,当不考虑RHP零点,并且当所有零极点都位于s点的左侧时,则s点到所有零极点的相位角均为零,不满足相位条件,因此不是根轨迹。当s点右方存在一个LHP零点或极点时,只有到该零点或极点的相位角为π,而相对其他点的相位角均为零,相位条件满足。近一步推导发现,当s点右侧的LHP极点或LHP零点的个数为奇数时,相位条件满足,构成实轴上的根轨迹。根据以上规则,对于LHP的多极点和零点系统,按其大小依次编号排列,则(1~2)、(3~4)、(5~6)……括号内两点区间所构成的区域为实轴上的根轨迹。当存在两个或偶数个RHP零点时,实轴上s点相位角变化为2π的整数倍,相位条件没有本质变化,以上实轴根轨迹的判据同样成立。当RHP零点的个数为奇数时,导致相位角变化π的奇数倍,则实轴根轨迹范围的判据即其右方极点或LHP零点的个数变为偶数。对于正反馈,根轨迹满足的条件与负反馈根的特征方程仅相差一个负号,即相位条件相差的角度为π,则在相同条件下,正反馈根轨迹与负反馈根轨迹的判据正好互补对称。当零、极点个数的一种配置为负反馈时,则另一种配置为正反馈。
在实轴根轨迹区域内,以环路低频增益T0为参变量,可确定闭环极点的具体位置。通常,N阶闭环系统共包含N条根轨迹分支。设A(s)=N(s)/D(s),T(s)=F(s)N(s)/D(s),则1+T(s)=0的特征方程为F(s)N(s)+D(s)=0。每条根轨迹的起点均对应为T0=0(F=0)即开环系统的极点,D(s)=0;而终点对应为T0→∞(F=∞)即开环零点N(s)=0。由于零点的数量m<N,则其中N-m条支路根轨迹的终点为无穷远零点。总之,在每支根轨迹中,随着环路增益T0由零趋向无穷,闭环的极点由开环的极点趋向开环的零点,当零点数量不够时,用无穷远零点代替。以上结果表明,开环极点零点通过环路增益的调制实现对闭环极点不同程度的影响。
当N>m,则当T0→∞时,将有N-m条根轨迹趋于s平面的无穷远,N-m中的最大耦散项形成s复频域的闭环根轨迹,最多只有一项形成实轴无穷远的根轨迹。
s复平面上满足相位条件的根轨迹可以通过对无穷大半圆的相位条件进行判断。由于闭环系统的共轭复极点特性,即共轭复极点关于实轴对称,则当开环零点数m低于开环极点数N时,总有成对且关于实轴对称的根轨迹趋向无穷远零点,并在无穷远处与根轨迹的渐进线相互重合。由于闭环无穷远根轨迹上的s点与实开环零极点的夹角均近似相同,并等效为渐进线与实轴的夹角,则对于偶数或奇数个开环RHP零点的电路系统,渐进线与实轴的夹角θ分别为

由于渐进线也是关于实轴对称的,因此一对共轭复数根轨迹的渐进线一定交于实轴相同的一点。渐进线交点与开环极点pi、零点zi的关系为
实轴上的两个开环极点随着T0的增大而相向运动,并在实轴上交汇成一个二重实极点,根轨迹在重极点处的切线一定为90°垂线。当继续增加T0后,该两重实极点耦合成一对共轭复极点,并随T0的增加而沿其渐进线趋向于复平面中的无穷远零点。实数重极点存在分离点与汇合点的差别。当实轴上相邻开环极点之间的区域为根轨迹,且重极点位于其间时则为分离点,或者说分离点实轴两边为开环极点;否则,实轴上相邻开环零点(其中之一可以是无穷远零点)之间的区域为根轨迹,则为汇合点,或者说汇合点两边为开环零点。
分离点的计算可采用闭环重极点的条件,同时也对应于开环增益T0的极值条件。设环路增益T(s)=T0N(s)/D(s),则分离点满足的函数为N′(s)D(s)-N(s)D′(s)=0。设开环系统在实轴上的零极点个数分别为m1、n1,则分离点还满足以下关系,式中σd为分离点的坐标

根轨迹离开开环共轭复极点处切线方向与正实轴夹角称为根轨迹的出射角,根轨迹趋于开环共轭复零点处切线方向与正实轴夹角称为根轨迹的入射角。此外,利用劳斯判据可求出根轨迹可能与虚轴的交点,交点对应的是闭环系统的临界稳定状态,对应的开环增益为临界稳定增益。
在N-m≥2的条件下,开环系统极点之和与闭环极点之和相同并保持为常数,即∑pi=∑pci=a1。式中a1为常数项归一化为1后开环极点特征多项式中s项的系数。当环路增益T0的变化导致部分闭环极点增加时,则剩余的极点将减小,以保持极点总和为常数。
闭环极点之积与开环极点之积以及开环零点之积的关系为

在以上根轨迹的分析中,均是以开环极点为固定量,环路增益为参变量,讨论闭环极点随环路增益变化的情况。另一方面,当环路增益固定,分析某开环极点变化对闭环特性的影响时,则可采用参量根轨迹分析方法。参量根轨迹的基本原理是将系统原始特征方程经过变化,得到以开环增益为参变量等效开环传递函数,即原来开环增益的根等效为变化后开环增益的环路增益,则等效系统的根轨迹即为原系统的参量根轨迹。利用参量根轨迹,可以分析多回路系统的控制特性。
7.4.2 根轨迹设计
利用闭环系统的根轨迹图,可以方便地判定闭环系统的稳定性。对于不稳定系统,可以通过调节开环零极点的数量与位置,改变闭环的根轨迹,使系统稳定。对于稳定的闭环系统,也可根据根轨迹的不同分布状态,计算系统的动态或瞬态特性,并通过开环与反馈网络的参数调节,在维持闭环稳定的条件下使系统的瞬态速度响应达到最优。
虽然LHP平面都是闭环系统稳定的区域,但系统的瞬态响应特性存在显著差异。在基于Bode图的频率响应分析中,主要依赖于开环增益的相位裕度指标分析。相位裕度可构成闭环系统的稳定性,即相位裕度越大,系统稳定性越高;另一方面,过高的相位裕度可抑制过冲,瞬态响应速度减缓。因此,在保证闭环稳定的前提条件下,选择合适的相位裕度如PM=60°,以20%内的幅度过冲为代价,可大幅度提高瞬态响应速度。对于闭环根轨迹,同样可通过共轭复极点的根轨迹位置的具体分布,计算阻尼因子并由此得到瞬态响应特性,同时得到电路的相位裕度。
利用根轨迹首先可进行系统稳定性的判定。在图7-20所示的两实极点的环路增益中,根据相位关系实轴上的根轨迹为两实极点之间的区域,随着T0的增加闭环极点将在实轴上相对移动,并在某特定的环路增益下重合为一点变为实数二重极点,此时对应的环路增益并不很高。随着T0的继续增加,两重实极点分离为一对共轭复极点,其根轨迹为过交点的垂线,与虚轴平行。对于实际系统,环路增益通常满足此条件使闭环极点变成共轭复极点。随着T0趋向无穷大,则共轭复极点可视为终止于无穷远零点。实际系统由于T0的有限增益,根轨迹存在上限区域。即使考虑理论上的最大变化范围,对于两极点开环系统,由于闭环根轨迹全部位于LHP平面,确保了闭环系统的稳定性。

图7-20 两极点系统
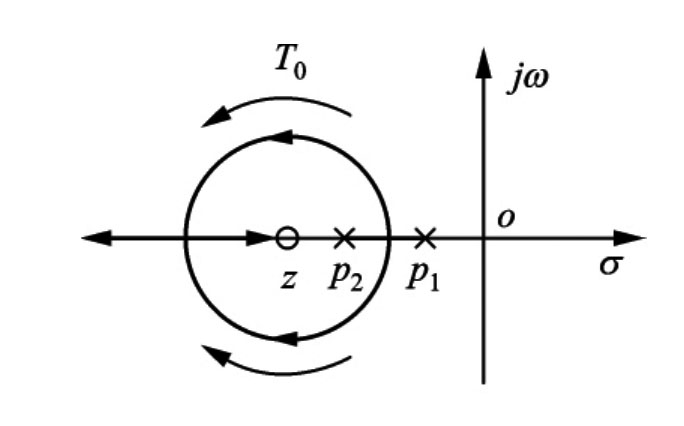
图7-21 两极点一零点系统
图7-21中在开环两极点基础上增加了一高频LHP零点,因此就实轴而言,除了原来两开环极点的区域保持为闭环根轨迹外,零点到负无穷远的区域同样为闭环根轨迹。然而,由于零点的存在导致复平面内的一对根轨迹发生显著的变化。在复平面的第二象限内,由于零点产生正的相位角,需要两实极点形成更大的相位角,则表现为根轨迹被零点所吸引。可以根据分离点和汇合点关系计算出两点的值,即

由此解得的分离点与汇合点值为

可以证明,复平面内的根轨迹是以零点为中心,零点到汇点或分离点的距离为半径的圆,半径随着T0的增大而增加。在第二象限为逆时针方向,而在第三象限为顺时针方向。两闭环共轭复极点汇合后,随着T0的继续增加,闭环的两重极点一个向左趋向无穷远零点,另一个向右趋向零点z。当无穷远零点被另一高频零点取代后,则根轨迹的性质不变,分别为两极点之间和两零点之间的区域,只是共轭复极点的轨迹发生变化。
对比以上两图可以发现,开环LHP极点有排斥闭环根轨迹的作用,而开环LHP零点有吸引闭环根轨迹的作用。图7-21中,若零点的位置越远,则根轨迹的半径越大,分离点越接近主极点p1。对于两极点系统,当增加一高频零点后,相对单纯两极点系统,系统稳定性增强,最小的相位裕度不受环路增益的影响。
如果以上开环电路构成正反馈系统,则实轴上的根轨迹与闭环负反馈的根轨迹区域反相,这样主极点将向RHP平面的无穷大零点移动,次极点移向高频LHP零点或无穷大LHP零点,由于至少有一个闭环极点进入RHP区域,则系统振荡而失去稳定。
对于三极点系统,如图7-22所示实轴根轨迹增加了高频次极点到无穷远零点的一段区域,共轭复根的渐进线夹角由两极点的π/2=90°变化到三极点的π/3=60°。显然,由于高频次极点对共轭复极点根轨迹的排斥作用,随着T0的增加相位裕度逐渐减小,当共轭复极点进入RHP平面后系统失去稳定。
在三极点系统中增加一LHP零点,则共轭复极点渐进线的夹角重新变为π/(3-1)=90°。根据式(7-22)的关系,由于零点绝对值的增加,使渐进线与实轴交点的位置发生变化。当LHP开环零点距离原点很远时,零点绝对值的增大使交点位置右移,零点绝对值的减小使交点位置左移。当|z|>∑|pi|时,交点σa>0,则当T0很大时系统闭环仍然进入RHP平面,闭环系统无法稳定,只能控制T0小于某一临界范围实现条件稳定,其根轨迹如图7-23所示。随着零点从高频方向逐渐接近p3极点,根轨迹渐进线的交点逐渐向原点趋近,当|z|=∑|pi|时,交点σa=0。当零点小于以上临界值后,渐进线交点进入LHP平面,系统稳定性得到保证。随着零点z的继续向原点移动,当z=p3时,则图7-23退化成图7-21的结果。此时渐进线交点位于p1、p2的中点,而且渐进线与复平面的根轨迹完全重合。

图7-22 三极点系统

图7-23 三极点一零点系统
为了实现对三极点系统的稳定性补偿控制,增加的LHP零点至少应充分接近高频p3极点。三极点系统中的零点补偿如图7-24所示。当z=p3或z=p2都可实现两极点系统,但相位裕度存在明显差异。虽然零点与p2的补偿有利于相位裕度的增加,所获得的带宽高,但这种补偿需要更小的零点,代价更大,并且当零极点不完全补偿时,在系统带宽内形成零极对,影响电路的瞬态响应特性。

图7-24 三极点系统中的零点补偿

图7-25 四极点一零点系统

对于图7-25所示的四极点系统,当只采用单零点补偿时,无论零点位置如何,共轭复极点根轨迹渐进线的夹角为π/(4-1)=60°,在开环增益较大的状态下闭环根轨迹一定可以进入RHP平面,只有在环路增益很小的条件下系统才具有条件稳定的特性,而对于多极点开环系统,这一条件通常无法满足。因此,对于多极点系统,在开环增益很大的条件下,为保持系统稳定而引入的LHP零点数量应使有效的极点数N-m=2,三阶系统的单零点图补偿如图7-26所示,三阶系统的双零点图补偿如图7-27所示。
图7-26 三阶系统的单零点补偿

图7-27 三阶系统的双零点补偿
由于根轨迹的实轴对称性,通常只需考虑LHP中第二象限内的闭环根轨迹上的某一复极点的影响,该点与原点的距离为固有振荡频率wo,并且该极点与原点的直线与负实轴的夹角β定义为阻尼角,阻尼因子ζ=cosβ。显然,ζ<1对应于共轭复极点、ζ>1则对应于分离的实极点。当 时阻尼角β=45°,而β=0时则ζ=1。由于在虚轴上临界稳定,相位裕度PM=0°,β越大则PM越小。根据两阶系统超调量Mp与ζ或PM的关系,可以得到Mp与阻尼角β的关系,即
时阻尼角β=45°,而β=0时则ζ=1。由于在虚轴上临界稳定,相位裕度PM=0°,β越大则PM越小。根据两阶系统超调量Mp与ζ或PM的关系,可以得到Mp与阻尼角β的关系,即

理论上极限的幅度过冲比例为100%,即1倍的过冲量,由于过冲随阻尼因子的减小而单调增加,因此根据上式中exp指数项的极值条件,得到过冲超调关系成立的条件为ζ< 时产生过冲,此状态下与超调量Mp相关的阻尼角为
时产生过冲,此状态下与超调量Mp相关的阻尼角为

当过冲 当Mp=0.2,β=63°。随着Mp的提高,阻尼角增加,阻尼因子减小、相位裕度下降。对于常规的PM=60°相位裕度,Mp=0.09,β=52.5°。显然,为保持60°的相位裕度或10%以内的幅度过冲,复频根轨迹的阻尼角不应超过52°。
当Mp=0.2,β=63°。随着Mp的提高,阻尼角增加,阻尼因子减小、相位裕度下降。对于常规的PM=60°相位裕度,Mp=0.09,β=52.5°。显然,为保持60°的相位裕度或10%以内的幅度过冲,复频根轨迹的阻尼角不应超过52°。
以阻尼角β=45°的射线将s复平面中的第二象限一分为二,靠近虚轴的区域幅度过冲大、相位裕度小,即稳定性差而非理想区域;相反,靠近实轴的区域虽然相位裕度大、过冲小、稳定性高,但在相同的带宽下响应速度慢,同样也不是最佳选择。只有在阻尼角β=45°附近区域的根轨迹才是最佳选择,并且离原点尽量远。保持足够远的距离是实现闭环系统尽可能高的带宽,而45°角则保持在同等带宽条件下闭环响应的过冲与瞬态响应特性之间达到平衡。
对于两极闭环系统,在特定的相位裕度PM或阻尼因子ζ下,固有振荡频率ω0决定了闭环系统瞬态响应特性,ω0越大即对应于开环带宽与环路带宽越大,瞬态响应速度越快。
在多极点系统中,可基于Butterworth特性的零极点构造低通传递函数,在保证系统稳定性的同时提高瞬态响应速度。Butterworth响应又称最大平坦度响应,对于n阶Butterworth传递函数,其幅度随频率的响应为

式中特征频率ω0表示系统带宽。当ω《ω0时,M(ω)→1;当 幅度下降-3dB;当ω》ω0时,幅度以(-40n)dB/dec速率下降。阶数n越大,幅度衰减速度越快,过渡带越窄,低通滤波传输特性的频率选择性越强。若构造以下形式的传递函数,即
幅度下降-3dB;当ω》ω0时,幅度以(-40n)dB/dec速率下降。阶数n越大,幅度衰减速度越快,过渡带越窄,低通滤波传输特性的频率选择性越强。若构造以下形式的传递函数,即

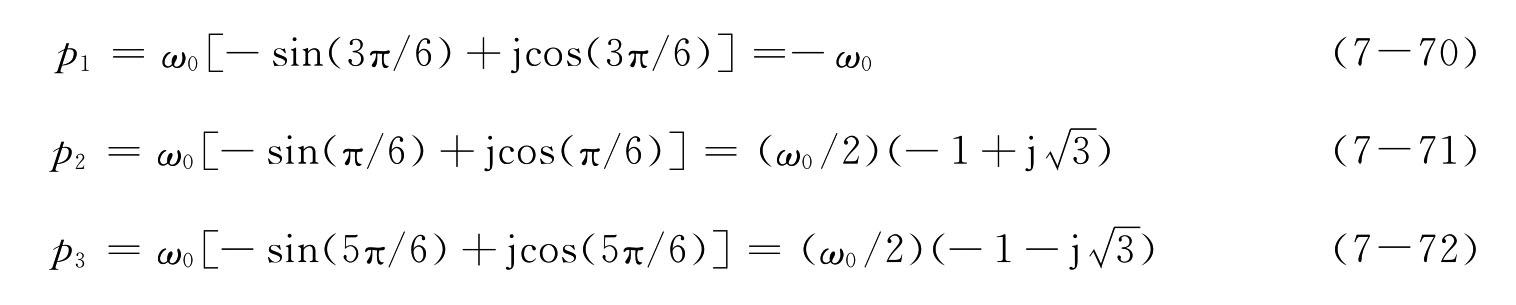
则上式中代入s=jω条件,即可得到Butterworth的频率响应特性,并有M2(ω)=P(-ω2)。由于系统闭环极点可由1/P(s2)=1+(-1)ns2n=0求出。根据P(s2)=F(s)F(-s)的条件,则F(s)与F(-s)的极点一定关于jω虚轴对称,则归一化极点在s域的分布如图7-28所示。

图7-28 Butterworth传递函数的归一化极点分布
n阶Butterworth响应具有n个LHP极点,即特征根中位于LHP平面内的解为

对于n=2的两阶Butterworth响应特性,其两个闭环LHP极点为

则两阶Butterworth传递函数的特征多项式为

式中阻尼因子满足 对于n=3的三阶Butterworth响应特性,3个闭环LHP极点分别为
对于n=3的三阶Butterworth响应特性,3个闭环LHP极点分别为
显然,p1为实极点,p2、p3构成一对共轭复极点,其对应的特征多项式为


图7-29 三阶Butterworth响应
对于闭环两共轭复极点,其阻尼因子ζ=cos(90°-30°)=1/2,阻尼角β=60°,特征频率为ω0,其中两闭环共轭复极点由一对开环共轭复极点变化而来。图7-29给出了三阶Butterworth响应系统中闭环极点(×点表示)与开环极点(△表示)的关系。开环增益的大小包含在特征频率ω0=GBW=p1cA0变量之中,p1c为开环主极点频率,A0与p1c的变化若满足以上ω0和T0的限制,则可确保开环极点趋向闭环极点的根轨迹位于LHP平面内,维持系统的稳定。
在单位负反馈条件下,此开环极点满足的特征方程为D0(s)=D(s)/ω03-1,即

因此,对于构成三阶Butterworth低通滤波所需的一对开环共轭复极点,其阻尼因子 阻尼角为45°,特征频率提高为
阻尼角为45°,特征频率提高为 而开环的环路带宽为ω0。显然,Butterworth响应特性即使在没有LHP零点补偿的条件下,通过控制开环的一对共轭复极点的位置,也能实现闭环系统的稳定与快速响应。
而开环的环路带宽为ω0。显然,Butterworth响应特性即使在没有LHP零点补偿的条件下,通过控制开环的一对共轭复极点的位置,也能实现闭环系统的稳定与快速响应。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。











