



【摘要】:在下面的例子当中,数据来自丹麦国家空间研究中心在格陵兰岛的航空激光雷达测量,数据由Riegl LMS-Q140i型号的机载激光雷达采集。为了检校系统安置角误差,对位于格陵兰岛的Kangerlussuaq机场的规则房屋沿四个相互垂直的航线扫描了四次。图4-12描述了检校时的飞行航线。使用上面提出的检校方法,将恢复出的安置误差角进行改正后得到的规则房屋的激光点云与建筑物边缘吻合得很好,见图4-15。
4.5.6 机载激光雷达测量系统安置误差检校算例
在下面的例子当中,数据来自丹麦国家空间研究中心在格陵兰岛的航空激光雷达测量,数据由Riegl LMS-Q140i型号的机载激光雷达采集。系统所采用的激光波长位于近红外频段,扫描角为60°,扫描频率为40条扫描线/s,每条线描线的激光脉冲次数为208次,激光测距精度优于5cm。作业使用Twin-Otter飞机,飞行高度为200~300m(见图4-11)。
为了检校系统安置角误差,对位于格陵兰岛的Kangerlussuaq机场的规则房屋沿四个相互垂直的航线扫描了四次。图4-12描述了检校时的飞行航线。图4-13(见彩图插页)显示的是从其中一个方向经过房屋顶部进行扫描所得到的点云数据的距离图像。
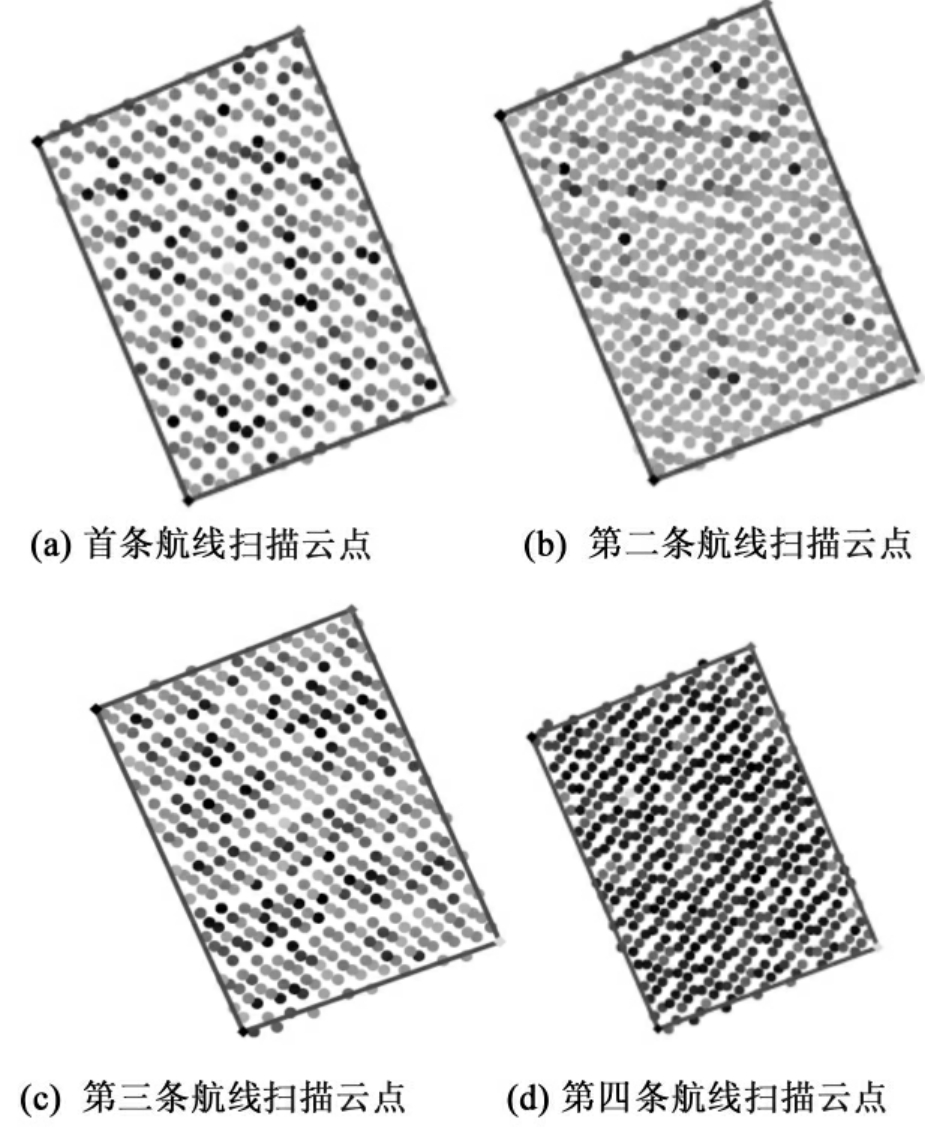
从图4-14(见彩图插页)可以看出,含有安置误差的激光点云数据与建筑物边缘吻合得并不好,并且从不同的飞行方向进行扫描得到的安置角误差的影响结果不相同。使用上面提出的检校方法,将恢复出的安置误差角进行改正后得到的规则房屋的激光点云与建筑物边缘吻合得很好,见图4-15(见彩图插页)。
采用上面的分步几何法恢复出系统的安置角误差值分别为: pitch0=0.25°;roll0=0.20°;hdg0=-0.05°。
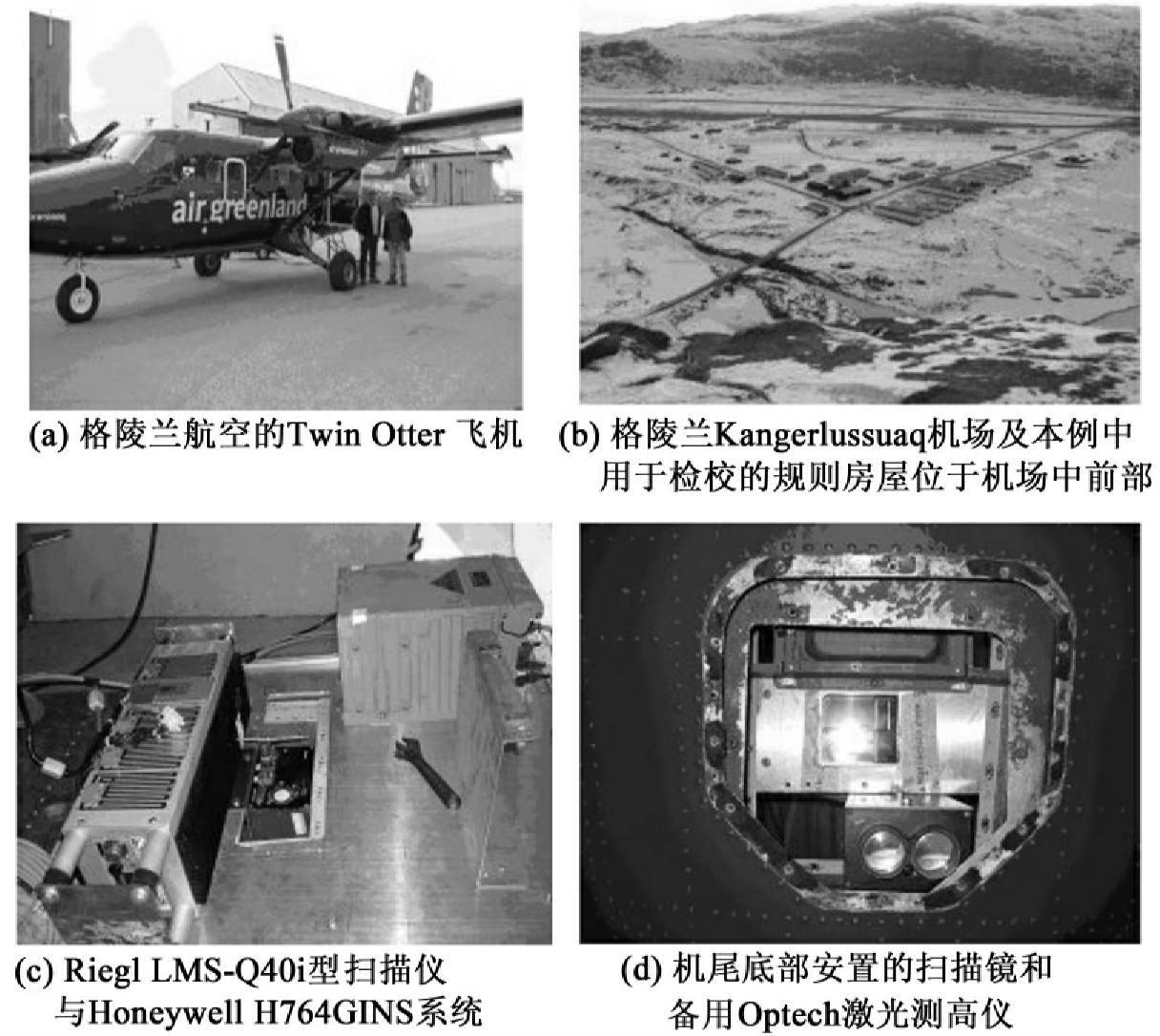
图4-11 机载激光雷达设备安置及机场
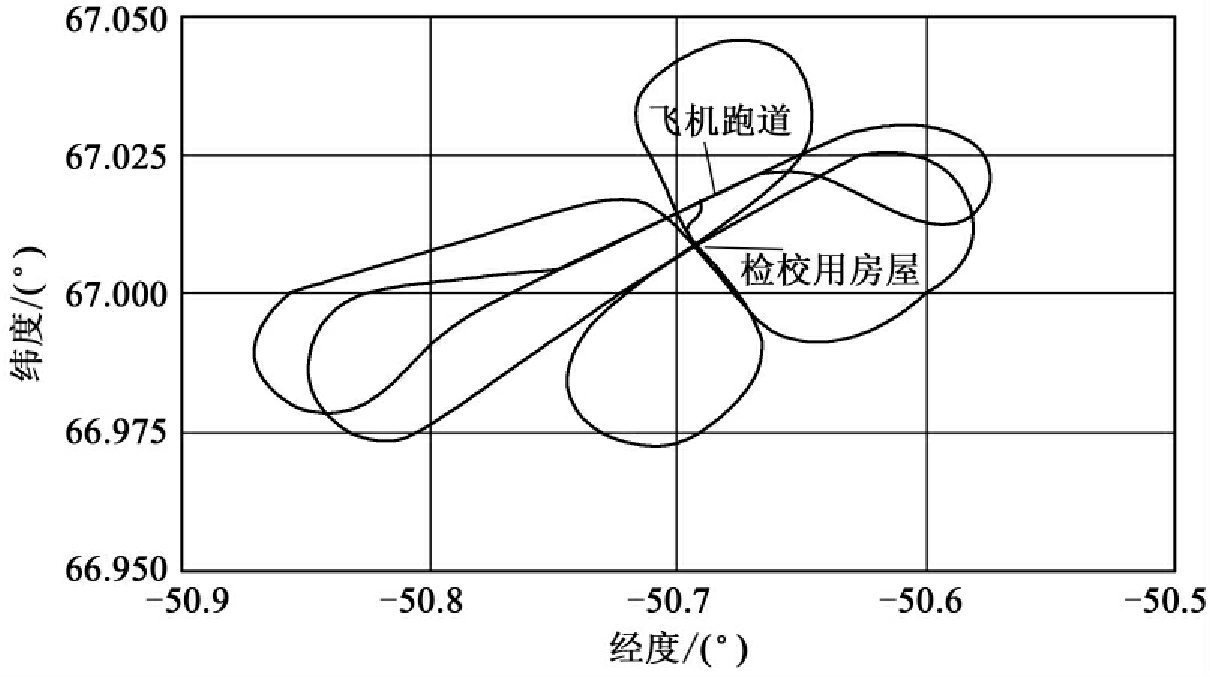
图4-12 Kangerlussuaq机场检校飞行航迹
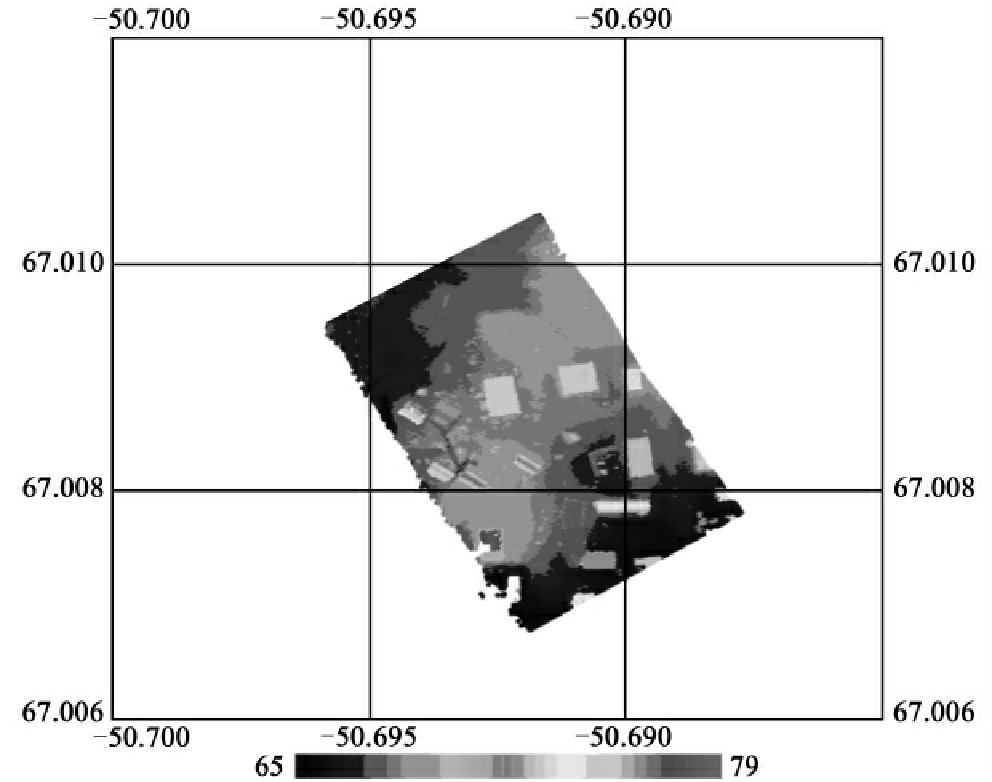
图4-13 Kangerlussuaq机场激光脚点的距离图像
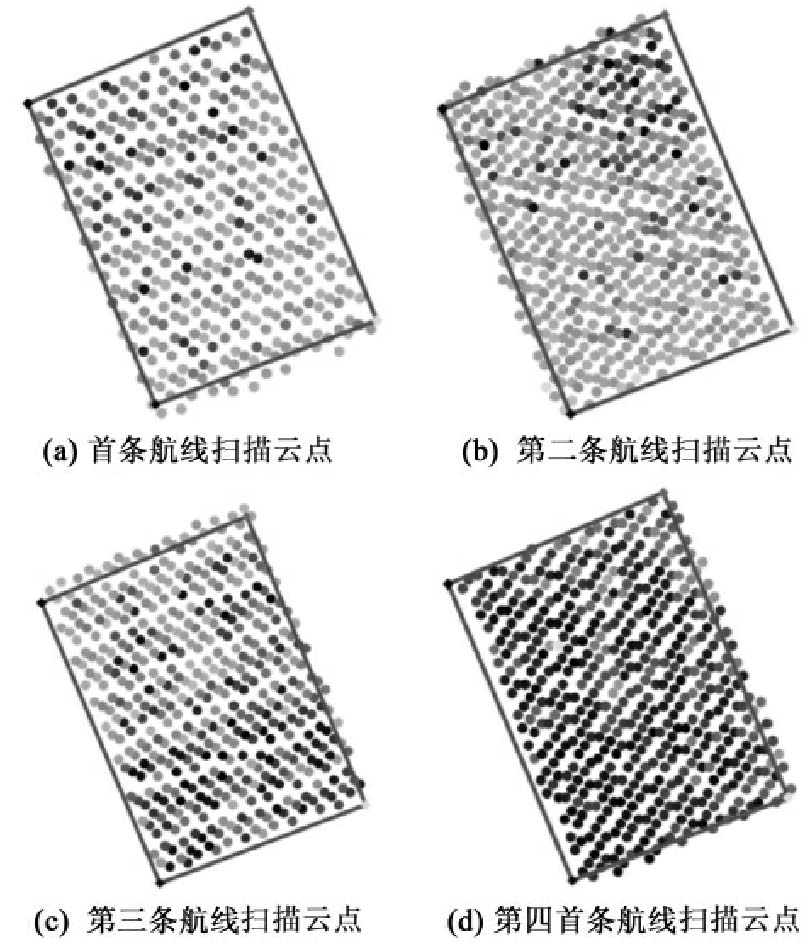
4-14 检校前沿不同航线获得的Kangerlussuaq机场建筑物的扫描点云与屋边缘的符合程度
4-15 检校后得到的沿不同航线的激光点云数据与规则房屋边缘的吻合情况
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。











