



所谓刚体,是由无数个相对距离保持不变的质点组成的集合。与质点模型一样,刚体是力学的第二个理想模型,它代表在任何情况下,其形状和大小都不会发生变化的物体。刚体内有一直线保持不动的运动,称为刚体的定轴转动,简称转动,这条固定的直线称为刚体的转轴。显然,刚体内的其他各点分别在垂直于转轴的各平面内做圆周运动,圆心都在转轴上。
一、刚体定轴转动研究背景
生活中我们观察到的运动,除了平动以外,还有一类广泛存在的运动形式——转动。为了使问题简化,我们讨论一种称为刚体——但实际上并不存在的理想物体的转动。这里,刚体的意思是说物体的原子之间的作用非常强,由于这种特性,使它运动的力不会使它发生形变,或者说刚体运动时它的形状保持不变。对于一些发生在刚体转动中的宏观量的研究,往往通过将刚体分成无穷多个小的质量元,每个质量元可以看作一个质点,这样刚体可以看成是由无穷多个相对位置保持不变的质点组成的特殊质点系。对每个质点应用力学定律,只需求和,便能推出刚体的转动定律。刚体转动分定轴转动和定点转动两大类。其中定轴转动是指刚体内存在一条直线保持不动,其他点绕着这条直线上的某点做圆周运动的运动形式,这条直线叫定轴转动的转轴,它是我们这一讲的主要学习内容;定点转动是指刚体内仅存在一点保持不动,其他点绕这点做圆周运动且运动平面方向可以改变的运动形式,这种运动形式将在下一讲中阐述。
二、刚体定轴转动的数学描述及物理解析
1.刚体运动的运动学描述
我们首先来定义描述刚体转动的物理量。与质点运动不同,刚体做定轴转动时其运动范围与它本身尺度在一个数量级,因此不能把刚体看成一个点而要把它视为没有相对位移的无穷多个质点的组合。小时候大家都玩过老鹰捉小鸡的游戏,知道排在前面的小朋友基本不需要怎么跑动,而排在后面的一些小朋友需要跑得很快。为什么会这样呢?如果小朋友排成的一条龙不散架的话可以视为一个刚体。从这个例子我们知道刚体中各点的线速度(沿圆周跑动的速度)是不一样的。如果我们用线速度来描述刚体的运动,无穷多个质点组成的刚体就需要无穷多个线速度来描述它的运动。显然,这是不可能做到的,也是不必要的。那到底用什么物理量来描述刚体定轴转动合适呢?我们进一步观察排成一条龙的小朋友的运动,假设最前面的小朋友不动,看成一个固定轴,其他小朋友围绕第一个小朋友做圆周运动,他们在同样的时间内跑过的圆周的长度不一样,但他们跑过的角度却是相同的!如果我们用这个角度除以跑过这个角度所需要的时间,我们就得到角速度的概念。这样,由于刚体上各点具有相同的角速度,我们就可以用角速度来描述刚体的转动。仿照线速度的定义,我们定义角速度的大小为
式中,φ是刚体中垂直于转轴平面内从转轴引出的任意一条直线与选定的参考方向之间的夹角,角速度的方向沿转轴方向。角加速度的大小为
那么,角速度与线速度又有怎样的关系呢?上面讲到的排成一条龙的小朋友跑动的圆周长度不一样而角度一样,这是怎么回事呢?实际上这个角度可以用他们各自跑过的线长除以各自所在位置的半径得到,即
如果我们把各自的方向也考虑进来写成矢量关系式有
v=ω×r(14-4)
式(14-4)就是线速度与角速度之间的矢量关系式。
2.定轴转动动力学
1)作用于定轴转动刚体的合外力矩
刚体可以看成是由无穷多个质量元组成的特殊质点系,质点系内部的作用力对刚体的运动没有影响,所有内力对任意参考点的合力矩为0,故只需讨论合外力的力矩。设第i个质元受到外力Fi的作用。对于固定轴z轴,任何平行于z轴方向的外力都不会产生任何效果,因此,我们可以假设外力Fi垂直于z轴。如图14-1所示,其中O为质量元Δmi对转轴的垂足,而Ri为从原点O′引向Δmi的矢量,O对原点O′的位置矢量为OO′,ri为Δmi对O的位矢。外力Fi对点O′的力矩为
图14-1
Mi=Ri×Fi(14-5)
由图14-1可知,Ri=OO′+ri,这样式(14-5)可写为
Mi=Ri×Fi=OO′×Fi+ri×Fi
式中,OO′×Fi垂直于z轴(O与O′的连线),它被固定轴的轴承反力矩所抵消,因此可以不考虑;第二项平行于z轴,是使刚体绕z轴转动的力矩,将其记为Miz,因此
Miz=ri×Fi(14-6)
其大小为Miz=riFisinθi。这样,所有外力产生的力矩沿转轴方向的分量为
Mz称为合外力矩的z分量,它可改变刚体绕z轴的转动状态。由式(14-7)可知参考点可选择在转轴的任意点上,力矩在z方向的分量都一样,都等于以转动平面内轴心为参考点计算的力矩。
2)刚体转动的角动量和刚体定轴转动定理
类似上节的讨论,第i个质元对点O的角动量为
Li=Ri×Δmivi(14-8)
由于刚体做定轴转动,Ri与vi垂直,有Li=RiΔmivi,进而有
Liz=RiΔmivisinθi=riΔmivi(14-9)
考虑到vi=riω,式(14-9)可写成
总分量
记为
Lz=Jω(14-12)
式(14-12)中
称为刚体的转动惯量。刚体绕某个固定轴转动时转动惯量J是一个常数,它与平动惯性量度——质量一样是量度物质转动惯性的物理量,但也有不同,对于宏观低速运动的物体,我们一般将质量视为常数,与参考系无关;而转动惯量是一个与参考点选择有关的量,所以必须指明相对于哪个参考点(或者哪个参考轴)的转动惯量。根据角动量定理
Mzdt=d Lz(14-14)
将式(14-12)代入(14-14),并令 =β为角加速度,Mz用M表示(Mx,My被作用在轴上的反力矩抵消可不考虑对转动的影响),有
=β为角加速度,Mz用M表示(Mx,My被作用在轴上的反力矩抵消可不考虑对转动的影响),有
式(14-15)称为刚体的定轴转动定理。与牛顿第二定律表示的质点一维平动方程F=m =ma有类似的形式。如果牛顿第二定律方程中的m有平动惯性的含义,那么显然式(14-15)中的J表示物体转动的惯性,故称之为刚体的转动惯量。
=ma有类似的形式。如果牛顿第二定律方程中的m有平动惯性的含义,那么显然式(14-15)中的J表示物体转动的惯性,故称之为刚体的转动惯量。
3)刚体的转动惯量
(1)刚体转动惯量的一般计算。
由于转动惯量与参考轴有关,不同的参考轴有不同的转动惯量,我们需要对它进行一些讨论。首先对于质量连续分布的刚体,根据转动惯量的定义
J=∫r2dm(14-16)
来计算刚体的转动惯量。例如,考虑一根木棒绕穿过其一端的垂直轴转动的情况,如图14-2(a)所示。按照式(14-16),我们以轴心为坐标原点,沿木棒为x轴建立一维Ox坐标。按转动惯量定义式(14-16)对木棒的质量微元与距离x平方的乘积求积分(在此例中y等于零)即为木棒绕该轴的转动惯量,即
图14-2
J=∫x2dm(14-17)
假设木棒质量均匀分布,总质量为M,总长度为L,则质量微元与长度微元的关系是
将式(14-18)代入式(14-17)可得
由于转动惯量的量纲总是质量乘以长度的平方,所以我们真正关心的是因子1/3。如果转轴选取在木棒的中心[见图14-2(b)],则将x的积分范围变为- 到
到 ,再积分式(14-19)可得
,再积分式(14-19)可得
比较式(14-19)和式(14-20),我们发现绕中心转动一根棒比绕它的端点转动要容易得多。
(2)薄板的垂直轴定理。
如图14-3所示,对于一些厚度远远小于宽度的薄板,我们可以证明沿厚度方向轴的转动惯量Jz与沿平板长度方向的转动惯量和沿平板宽度方向的转动惯量满足
图14-3
Jz=Jx+Jy(14-21)
式(14-21)为刚体转动的垂直轴定理。
证明:如图14-3所示,在厚度可以忽略不计的情况下,有
代入刚体转动惯量的一般表达式J=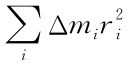 ,得
,得
即
Jz=Jx+Jy(14-23)
刚体垂直轴定理得证。
(3)薄板的平行轴定理。
如图14-4所示,过质量元Δmi与两平行轴垂直的平面分别交两平行轴于点O和点O′,质量元Δmi相对于点O和O′的位矢分别为ri和 ,点O′相对O的位置矢量为d。假设过O点的转轴是过刚体质心的转轴,按照定义,刚体对O′轴的转动惯量为
,点O′相对O的位置矢量为d。假设过O点的转轴是过刚体质心的转轴,按照定义,刚体对O′轴的转动惯量为
图14-4
由于
将式(14-25)代入式(14-24)可得
在质心坐标系中有
将式(14-27)代入式(14-26)可得
即
J=Jc+md2(14-28)
其中Jc= 为刚体相对于通过质心的轴的转动惯量,d为考察轴与过质心的轴之间的距离。
为刚体相对于通过质心的轴的转动惯量,d为考察轴与过质心的轴之间的距离。
三、实验测量刚体惯性系数
转动惯量是刚体转动中惯性大小的量度。它与刚体的质量、形状大小和转轴的位置有关。形状简单的刚体,可以通过数学计算求得其绕定轴的转动惯量;而形状复杂的刚体的转动惯量,则大都采用实验方法测定。下面介绍一种用刚体转动实验仪测定刚体的转动惯量的方法。
实验上测定刚体的转动惯量,一般都是使刚体以某一形式运动,通过描述这种运动的特定物理量与转动惯量的关系来间接地测定刚体的转动惯量。测定转动惯量的实验方法较多,如拉伸法、扭摆法、三线摆法等,本实验采用拉伸法利用“刚体转动实验仪”来测定刚体的转动惯量。
刚体绕固定转轴转动时,刚体转动的角加速度β与刚体所受到的合外力矩M,以及刚体对该转轴的转动惯量J之间有M=Jβ的关系,这一关系称为刚体的转动定律。本实验所用仪器装置如图14-5所示。当忽略了各种摩擦阻力,不计滑轮和线的质量,并且线长不变时,塔轮仅仅受到线的拉力T的力矩作用,砝码m以加速度a下落,则
图14-5
T=m(g-a)(14-29)
Tr=Jβ(14-30)
式中,g为当地重力加速度;r,β为塔轮的半径和转动角加速度;J为转动系统对轴的转动惯量。若砝码m由静止开始下落高度h所用的时间为t,则
将式(14-31)代入式(14-29),并利用a=rβ可以解得m 。如果实验过程中使g≫a,则有
。如果实验过程中使g≫a,则有
下面就公式(14-32)分两种情况来讨论:
(1)若保持m,h大小不变,改变r,测出对应的时间t。根据(14-32)式有
作r 图,如果图线是一条直线,则公式(14-33)被验证,从而间接地验证了刚体的转动定律,同时由直线的斜率可求出系统转动惯量J。
图,如果图线是一条直线,则公式(14-33)被验证,从而间接地验证了刚体的转动定律,同时由直线的斜率可求出系统转动惯量J。
(2)若保持r、h及J不变,改变砝码的质量,测出砝码下落高度的时间,式(14-32)可化为
若实验测得一系列m和t,在直角坐标纸上作m 图像。如果得一直线,则说明实验过程中转动定律成立,再由图解法求出直线的斜率,便可求得转动惯量。
图像。如果得一直线,则说明实验过程中转动定律成立,再由图解法求出直线的斜率,便可求得转动惯量。
四、刚体定轴转动的功和机械能
我们知道刚体会在力矩作用下由静止状态发生转动,这个力矩与其角位移的乘积定义为力矩对刚体做的功。我们也可以把刚体看成连续质量分布的质点系,从刚体中某个质元在外力作用下的运动通过微分、积分的方法来推导作用在刚体上力矩做的功。假设作用在质元Δmi上的外力Fi处于质元的转动平面内,当刚体绕固定轴转过dφ时Δmi的位移为dri,则做的功为
d Wi=Fi·dri=Ficosθiridφ=Midφ(14-35)
式(14-35)中Mi表示Fi相对转轴中心的力矩。如果刚体在该力矩作用下从角位置φ0转动到角位置φ,则力做的功为
在式(14-36)基础上对作用在刚体上的所有力矩的功求和,得到所有外力矩对刚体做的功,即
式(14-37)就是作用在刚体上所有外力矩对刚体做功的表达式。
另外,重新改写刚体的定轴转动定理为
将式(14-38)两边同乘以dφ可得
式(14-39)两边积分可得
式(14-40)即是刚体转动的动能定理,它表示外力矩对刚体做的功等于刚体动能的增量,其中Ek= 为刚体的转动动能,则Ek0=
为刚体的转动动能,则Ek0= 表示刚体在初始位置的转动动能。
表示刚体在初始位置的转动动能。
当然,在地球上的刚体,由于受到重力的作用应该具有重力势能。原则上刚体的重力势能等于刚体中各个质元的重力势能之和,即
现在,我们把式(14-41)进行变形,写为
式(14-42)就是刚体的势能表达式,其中zc是刚体质心在竖直方向的位置参量。这样重力对刚体做的功就可表示为刚体势能增量的负值,即
将式(14-40)中力矩的功分为除重力矩以外的其他力矩M′做的功W′和重力矩Mg做的功Wg两部分,并把重力矩做的功用刚体重力势能增量的负值即式(14-43)表示,可得
式(14-44)就是刚体做定轴转动的功能原理表达式,它表示除重力矩以外其他外力矩对刚体做的功等于刚体机械能的增量。
如果M′=0,则有
式(14-45)是刚体机械能守恒的表达式,它说明当除了重力矩以外的外力矩为零时,刚体在任一个位置的机械能与初始位置的机械能相等,或者说刚体的机械能是一个常数,我们称之为刚体的机械能守恒。
五、应用举例
例 如图14-6所示,两物体质量分别是m1与m2,定滑轮的质量为m,半径为r,可视作均匀圆盘。已知m2与桌面的滑动摩擦系数为μ,求m1下落的加速度和绳子两端的拉力。
图14-6
解:由于绳子不可伸长或者断裂,质量为m1与m2两滑块的加速度应该相等,按照牛顿第二定律有
m1g-T1=m1a ①
T2-μm2g=m2a ②
对滑轮用转动定律
另根据绳在滑轮上不打滑的条件有
β=a/r ④
联立式①、②、③、④解得
显然,T1≠T2,但如果我们忽略滑轮的质量,式⑥和式⑦将给出T1=T2的结果。
六、关于转动惯量概念的拓展
关于转动惯量的求法,上面已经做了详细的阐述,主要涉及两种情况:转轴通过质心以及转轴不通过质心。但是,这是否包含所有情况呢?答案是否定的。举一个简单的例子:地球围绕太阳旋转(假定地球自转不受太阳的影响,且地球半径不忽略,地球公转轨道为圆形),此时地球的转动惯量如何求解呢?假设地球半径为r,质量为M,公转半径为R,若按照常规解法,运用平行轴定理,很容易得到
但是根据转动惯量的定义:“刚体由N个质点组成,绕z轴旋转,则其相对于轴的转动惯量为J=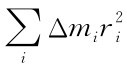 ”,显然地球的例子就不适应了,因为地球不但有公转还有自转。严格意义上讲,地球上的每个质点绕太阳旋转的轨迹不再是圆,而是一种复杂的摆线,从而传统的平行轴定理可能是错误的。下面介绍另一种可能的方法。
”,显然地球的例子就不适应了,因为地球不但有公转还有自转。严格意义上讲,地球上的每个质点绕太阳旋转的轨迹不再是圆,而是一种复杂的摆线,从而传统的平行轴定理可能是错误的。下面介绍另一种可能的方法。
我们首先定义两种惯量。
自转惯量J′:刚体围绕通过其质心的轴转动时的转动惯量。
公转惯量J″:将刚体抽象为质点时围绕某一转轴的转动惯量。
假设任何旋转的物体,其转动惯量可写成J=J′+J″,下面进行证明。
证明 (1)对于质点情形。假设某一质点绕某一转轴旋转。
情况一:转轴通过质点,由于质点到转轴的距离恒为零,所以有
J′=0,J″=0,J=J′+J″
显然假设成立。
情况二:转轴不通过质点,且质点距转轴为R,则有
J′=0,J″=MR2,J=MR2=J′+J″
显然假设成立。
(2)对于细杆情形,假设某一细杆,长度为l,质量为m。
情况一:转轴通过细杆质心,J″=0,J=J′+J″=J′,假设成立。
情况二:转轴不通过细杆质心,质心距转轴为l/2,有
上式对比式(14-19),假设成立。
同理可证,当物体为圆环、圆盘、薄球壳、球体时,应用平行轴定理都可证明假设成立,因此我们认为对于地球这种既有自转又有公转的刚体,假设成立。当然,这种举例式证明的正确性有待进一步证明。
七、课后习题
14-1 一个均质细杆长为l,质量为m,平放在摩擦系数为μ的水平桌面上,设开始时杆以角速度ω0绕过中心且垂直于桌面的轴转动,如图14-7所示。试求:
图14-7
(1)作用于杆的摩擦力矩;
(2)经过多长时间杆才会停止转动。
14-2 质量为m,长度为l的均匀细杆在平面x Oy内,与x轴夹角为α,其一端在原点O,求此杆对x轴和y轴的转动惯量。
14-3 如图14-8所示,一个质量为m的人手拉着一绕过定滑轮的绳子匀速往上爬,滑轮的另一端吊一个质量为 m的物体B。设滑轮质量亦为
m的物体B。设滑轮质量亦为 m,且均匀分布在其边沿,求物体B上升的加速度。
m,且均匀分布在其边沿,求物体B上升的加速度。
图14-8
14-4 一质量均匀分布的圆盘,质量为M,半径为R,放在一粗糙水平面上,圆盘与水平桌面的摩擦系数为μ。开始时,圆盘静止。当一质量为m的子弹以水平速度v垂直于圆盘半径打入圆盘边沿并且嵌在盘边上后,圆盘开始绕其中心轴转动,问:
(1)子弹击中圆盘后圆盘获得的角速度是多少?
(2)经过多长时间,圆盘停止转动?
14-5 有一质量为M,长为l的均匀细杆(见图14-9),其一端固定一个质量也为M的小球,且可绕垂直于细杆的水平轴O自由转动,组成一球摆。现有一个质量为m的子弹以水平速度v射向小球,子弹穿过小球后速率减为v/2,方向不变。试求:
(1)如果要使球摆能在竖直平面内完成一个完全的圆周运动,子弹射入速度的大小是多少?
(2)如果测得球摆摆到与转轴同一水平位置时的角速度为ω1,试计算此位置球摆的角加速度及对支点O的作用力。
图14-9
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。










