



4.2.2 刚体的平行移动与定轴转动
根据刚体的运动特征来判别刚体的运动形式。本节先讨论刚体的基本运动——平动和定轴转动。它们是讨论复杂运动的基础。
1.刚体的平动
刚体运动时若体内任一直线始终保持与其初始位置平行,刚体的这种运动称为平动。如果体内各点的轨迹是直线,则称为直线平动;如果体内各点的轨迹是曲线,则称为曲线平动。
刚体作平动时,体内各点的轨迹形状相同,在每一瞬时,各点具有相同的速度和加速度。因此,整个刚体的运动,完全可由体内任一点的运动来确定。
2.刚体的定轴转动
刚体运动时,体内(或其延展部分)有一直线始终保持不动,称这种运动为刚体的定轴转动。保持不动的那条直线称为转轴或转动轴。表4.2-5列出了转动刚体的运动学公式。
表4.2-5 刚体定轴转动的公式
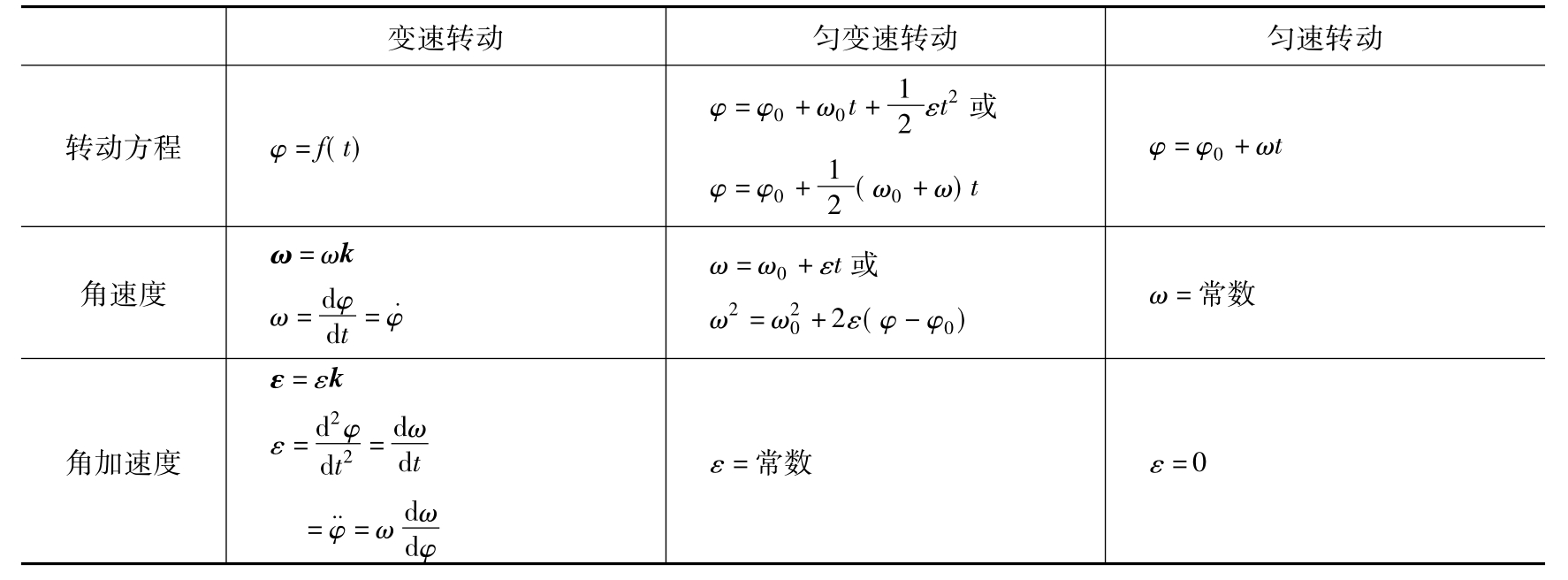
表中,角φ称为刚体的转角,单位为rad(弧度)。转角φ和角速度ω均是一个代数量,可根据右手法则确定其正负号(图4.2-7(a))。角速度ω的大小表示了转动的快慢,其正负号表明了刚体转动的转向。角速度的单位为rad/s(弧度/秒)。工程上常用转速n来表示转动快慢,其单位为r/min(转/分)。角速度与转速的关系为
![]()

图4.2-7
角加速度ε也是代数量,其正向与转角φ的正向一致。代数量的正负号表示了ε的转向。显然,当ε与ω同号时,刚体作加速转动;当ε与ω异号时,刚体作减速转动。角加速度的单位为rad/s2(弧度/秒2)。
应当指出,角速度和角加速度可以用沿着转轴的一个滑动矢量来表示,角速度矢ω和角加速度矢ε的指向,可根据它们代数量的正负号按右手法则确定(图4.2-7(a))。
3.转动刚体上各点的速度和加速度
转动刚体与其体上任一点M的运动学关系如表4.2-6所示。
表4.2-6 转动刚体任一点的运动关系

表中,a为加速度矢α与转动半径OM之间的夹角(图4.2-7(b))。由表中各式可知,在每一瞬时,转动刚体内任一点的速度和加速度的大小都与转动半径R成正比,且各点的加速度与转动半径成相同的夹角。
4.刚体基本运动的问题类型
(1)研究平动刚体的运动规律
因平动刚体的运动学问题可归结为点的运动学问题来研究,故一般取传递运动的接触点或连接点作为分析对象。
应当注意,刚体作曲线平动时,各点有各自的曲率中心和自然轴系,这一点在图示平动刚体各点的运动元素时,要多加注意。
(2)研究转动刚体及其体上一点的运动规律
①求ω和ε或转动刚体上某一点的v和a。这类问题,若已知转动方程,则可通过求导得到相应的ω和ε,从而求出刚体上某点的v和a;或已知转动刚体上某点的运动方程,用上述类似方法可求得刚体上其他点的v和a及刚体的ω和ε。
②求转动方程或刚体上一点的运动方程。这类问题一般可通过对已知的ε方程或刚体上一点的a方程,进行积分运算得以解决。但尚须已知运动的初始条件,即t=0时,转角φ0和角速度ω0或弧坐标s0和初速度v0。
【例4.2-5】图4.2-8所示皮带传动机构,主动轮O1的半径为r1,角加速度ε1为常量,初角速度ω10=0;从动轮O2的半径为r2。求任意瞬时t两轮的角速度ω1、ω2和从动轮的角加速度ε2。

图4.2-8
解:因ε1为常量,由匀变速转动的公式得ω1=ω10+ε1t=ε1t,设皮带与轮子间无相对滑动,则皮带在两轮间的连线段可看做平动,因此v1=v2,而v1=r1ω1,v2=r2ω2,由v1=v2,得ω2=ω1 又皮带在连线段上各点的加速度等于轮子上与皮带接触点的切向加速度,即r1ε1=r2ε2,于是ε2=
又皮带在连线段上各点的加速度等于轮子上与皮带接触点的切向加速度,即r1ε1=r2ε2,于是ε2= 可见两轮的角速度和角加速度之比都与半径成反比。ω2和ε2的转向如图4.2-8所示。
可见两轮的角速度和角加速度之比都与半径成反比。ω2和ε2的转向如图4.2-8所示。
【例4.2-6】图4.2-9所示,机构由杆O1A、O2B和矩形板ABCD组成。已知O1A=O2B= r,O1O2=AB=DC=2r,AD=BC=d,杆O1A以ε=2trad/s2的角加速度绕O1轴转动,其中t以s计,长度以m计。设t=0时,φ0=6φ0=0,求当φ=90°时,矩形板顶点D和上边缘中点E的速度和加速度。
解:首先求杆O1A的角速度ω。因杆O1A作变速转动,t=0时φ0=6φ0=0,故有
![]()

由此可知,当φ转过 rad时,经历的时间应为
rad时,经历的时间应为
![]()

图4.2-9
该瞬时杆O1A的角速度
![]()
其次计算点D和E的速度和加速度。因矩形板作曲线平动,其体上各点都有各自的曲率中心,在同一瞬时,各点的曲率半径是互相平行的,如图4.2-9所示的D和E点的运动轨迹,故有
![]()
方向如图4.2-9所示。
![]()
方向如图4.2-9所示。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。











