



4.2.4 刚体的平面运动
1.运动方程式平面运动作为平动与转动的合成
刚体运动时,若体内各点分别保持在与某一固定平面相平行的平面内运动,即体内各点到该固定平面的距离保持不变,称刚体的这种运动为平面平行运动,简称平面运动。
根据刚体平面运动的运动特征,刚体平面运动可简化为平面图形在其平面内的运动。设刚体T作平面运动,体内各点运动时都保持在与固定平面M相平行的平面内运动。取一平行于平面M的平面N,与刚体相交,截得一平面图形S(图4.2-16)。当刚体运动时,平面图形S将始终保持在平面N内,而刚体内与S垂直的任一条直线A'A″则作平动。于是,只要知道A' A″与S的交点A的运动,便可知道A'A″直线上所有各点的运动。从而只要知道平面图形S内各点的运动,就可以知道整个刚体的运动。由此可见,刚体的平面运动可以简化为平面图形在其所在的平面内的运动来研究。

图4.2-16

图4.2-17
为了描述平面图形S在固定平面N内的运动,在该平面内取静坐标系O1xy,在图形S上任取一点O,称为基点,并任取一段直线OP(图4.2-17)。由于S内各点相对于OP的位置是一定的,只要确定了OP的位置,S的位置也就确定了。而OP的位置可用O点的坐标x0、y0及OP与x轴的夹角φ来确定。当S运动时,x0、y0、φ都随时间而变,都是时间t的单值连续函数,可表示为
x0=f1(t),y0=f2(t),φ=f3(t)
这个方程组是平面图形S的运动方程,也是刚体平面运动的运动方程。我们将不直接求解方程组,而是利用合成运动的方法来分析平面运动。
若取O1xy为静系,平面图形上任一点O为基点,并在O点上固结一随其作平动的动系Ox'y'(图4.2-17)。则图形S的相对运动为绕基点O的转动;图形的绝对运动就是平面运动;而牵连运动为动系随同基点O的平动。由此可见,平面图形S的运动可以分解为随基点的平动和绕基点的转动。为了方便,在下面叙述中,一般将不再图示动系和静系。
应当注意,平面运动随同基点的平动规律与基点的选择有关,而绕基点的转动规律与基点的选择无关。因此,在论及角速度和角加速度时,无需指明它们是对哪个基点而言的,并可统称为图形的角速度和角加速度。又因动系作平动,故在动系中观察到图形的角速度与角加速度就是图形相对静系的绝对角速度和绝对角加速度。
2.平面图形内各点的速度速度瞬心
前已指出,要解平面图形S内任一点M的速度不是用建立运动方程式求速度的方法,而是采用合成运动的方法。假设已知图形内某点O的速度vO及图形的角速度ω,则由速度合成定理得图形内任一点M的速度为

图4.2-18
vM=ve+vr=vO+vMO
即平面图形内任一点的速度等于基点的速度和该点绕基点转动的速度的矢量和(图4.2-18)。这个方法称为基点法,表明了图形内任意两点速度之间的关系。式中vMO是垂直OM的,指向由ω的转向决定。式中共有大小、方向(或方位)六个量,若知道其中四个量,则其余二个量可求。若把该式投影至该两点的连线,则得
(vM)OM=(vO)OM
即表示平面图形内任意两点的速度在该两点连线上的投影相等。这个方法称为投影法。在某些问题中采用此法十分方便。
如果在某一瞬时,平面图形内有一点I的速度为零,则由基点法可得图形内任一点M的速度为
vM=vI+vMI=vMI
称I点为该瞬时的瞬时速度中心,简称速度瞬心。表示图形内任一点的速度等于该点绕速度瞬心I点转动的速度。显然,vMI=MI·ω,vM⊥MI,指向由ω的转向决定。
求速度瞬心的位置有两种常见的情况,如图4.2-19所示。一是已知图形的ω和一点速度vO,则速度瞬心I在过O作由vO顺ω转向转90°的半直线OL上,取OI=v0/ω,I点就是速度瞬心。因为vIO=OI·ω=vO,但vIO与vO方向相反,所以vI=0。二是已知图形内任两点A、B速度的方位,则过A、B两点分别作vA、vB方位线的垂线,此垂线的交点即为所求的速度瞬心I。若还知任一点速度的方向,如已知vA,则求得I后可求图形S的ω是逆时针方向的,于是vB的方向也可定了。还有几种特殊情况:如果已知图形内任两点速度大小不等,方向相同且垂直于两点连线,则根据速度大小与到速度瞬心距离成正比的关系容易找出I点并进而求出ω的转向;若两点速度反向且垂直两点连线,则同样可找出I点位置并求得ω的转向;又若两点速度vA=vB,此时速度瞬心在无穷远处,ω=vA/∞=vB/∞=0,即图形作瞬时平动(请注意与刚体作平动的区别),此时各点加速度不等,角加速度不为零。

图4.2-19
【例4.2-10】图4.2-20示平面机构由杆AB、BC、DE、EF组成,已知AB=20cm,BC=DE=EF=30cm,CE=CD,ω=4πrad/s,求图示位置F点的速度vF和杆ED的角速度ωED。
解:vB=AB·ω=80πcm/s,由投影法(vC)CB=(vB)CB,得vC=vBcos45°= cm/s;也可找到BC杆的速度瞬心IBC,则vC=vB,
cm/s;也可找到BC杆的速度瞬心IBC,则vC=vB, πcm/s,并由vB方向可定ωBC的转向,从而确定vC的方向。vE=2vC=
πcm/s,并由vB方向可定ωBC的转向,从而确定vC的方向。vE=2vC= πcm/s,方向同vC。于是ωED=vE/ED=vC/CD=
πcm/s,方向同vC。于是ωED=vE/ED=vC/CD= rad/s,转向由vE方向定,如图4.2-20所示。又作平面运动的杆EF,由于速度瞬心在无穷远,即杆EF作瞬时平动,所以vF=vE=
rad/s,转向由vE方向定,如图4.2-20所示。又作平面运动的杆EF,由于速度瞬心在无穷远,即杆EF作瞬时平动,所以vF=vE= cm/s,vF方向同vE。
cm/s,vF方向同vE。

图4.2-20
3.平面图形内各点的加速度
假设已知平面图形某一点O的加速度aO及该瞬时图形的角速度ω和角加速度ε,求图形的任一点M的加速度aM。由于动坐标作平动,即牵连运动是平动,则由加速度合成定理得(见图4.2-21)
aM=aO+aMOτ+aMOn
式中:aMOτ=OM·ε,垂直OM,指向由ε转向决定;aMOn=OM·ω2,由M点指向O点。上式是一个平面矢量方程,故可用以求解式中两个未知量。
假若图形内找到一点A,其加速度aA=0,则任意点M的加速度aM=aMA=aMAτ+aMAn。称此点A为加速度瞬心。加速度瞬心的求法这里不作介绍。但须注意,速度瞬心的加速度不为零,不是加速度瞬心。
【例4.2-11】轮O在直线轨道上作纯滚动,轮子半径R,轮心的vO、aO已知,求速度瞬心I点和轮缘上A点的加速度(图4.2-22)。

图4.2-21

图4.2-22
解:轮O作纯滚动,I点是速度瞬心,则ω=vO/R,而ε=dω/dt =aO/R,由
=aO/R,由
aI=aO+aIOτ+aIOn
式中:aIOτ=Rε=aO,aIOn=Rω2= ,所以
,所以
aI=aIOn
aA=aO+aAOτ+aAOn
式中:aAOτ=Rε=aO,aAOn
![]()
由本题讨论可知,速度瞬心的加速度并不为零;当轮沿固定面作纯滚动时,恒有关系式vO=Rω和aO=RεO。
【例4.2-12】曲柄连杆机构(图4.2-23),OA=r,AB=l及角φ、ψ,设曲柄转动的ω=常量,试求图示位置滑块B的加速度aB。
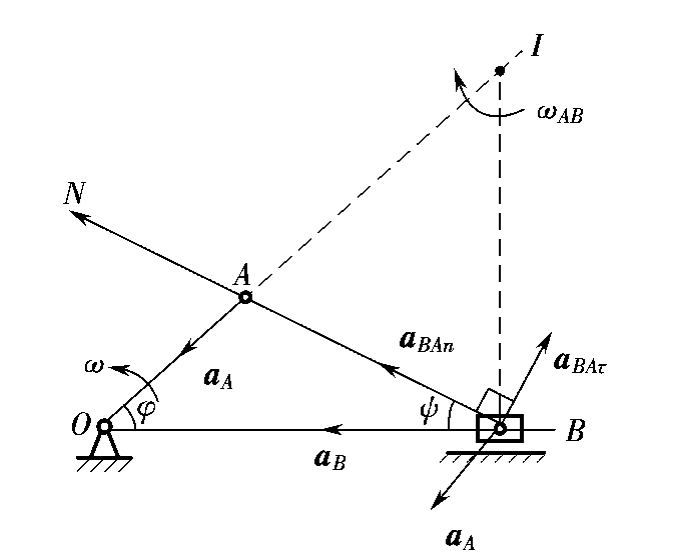
图4.2-23

图4.2-24
解:连杆AB作平面运动,取A为基点,则
aB=aA+aBAτ+aBAn
式中:aA=rω2,方向由A向O(因ε=0,所以aAτ=0);aBAτ=lεAB未知,方位垂直AB;aBAn= ,方向由B向A;设aB水平向左。
,方向由B向A;设aB水平向左。
把上式投影至沿BA的N轴上,则

【例4.2-13】轮O在直线轨道上作纯滚动,轮心O以匀速率vO=20cm/s运动,半径R= 20cm,轮缘上用销钉连接杆AB,滑块B可沿水平直线滑动,图4.2-24所示位置AI= cm,AB⊥AI,AB=60cm。求vB和aB。
cm,AB⊥AI,AB=60cm。求vB和aB。
解:轮和杆的速度瞬心分别为I点和I'点,由vO方向可知vA方向,从而可知ωAB的转向,和vB水平向右。

aB=aA+aBAτ+aBAn=aAOn+aBAτ+aBAn
式中:aA=aAOn 只有aB和aBAτ的大小未知,故把上式投影至垂直aBAτ的沿BA的N轴上:
只有aB和aBAτ的大小未知,故把上式投影至垂直aBAτ的沿BA的N轴上:
![]()
【例4.2-14】平面机构由杆OA、AB、CD、DO'和轮E组成,如图4.2-25(a)所示。当杆OA以角速度ω绕O轴转动时,带动各杆在平面内运动,也使轮E在直线轨道上作纯滚动。试图示该机构内作平面运动构件的速度瞬心,并画出A、B、C、D、E各点速度的方向。
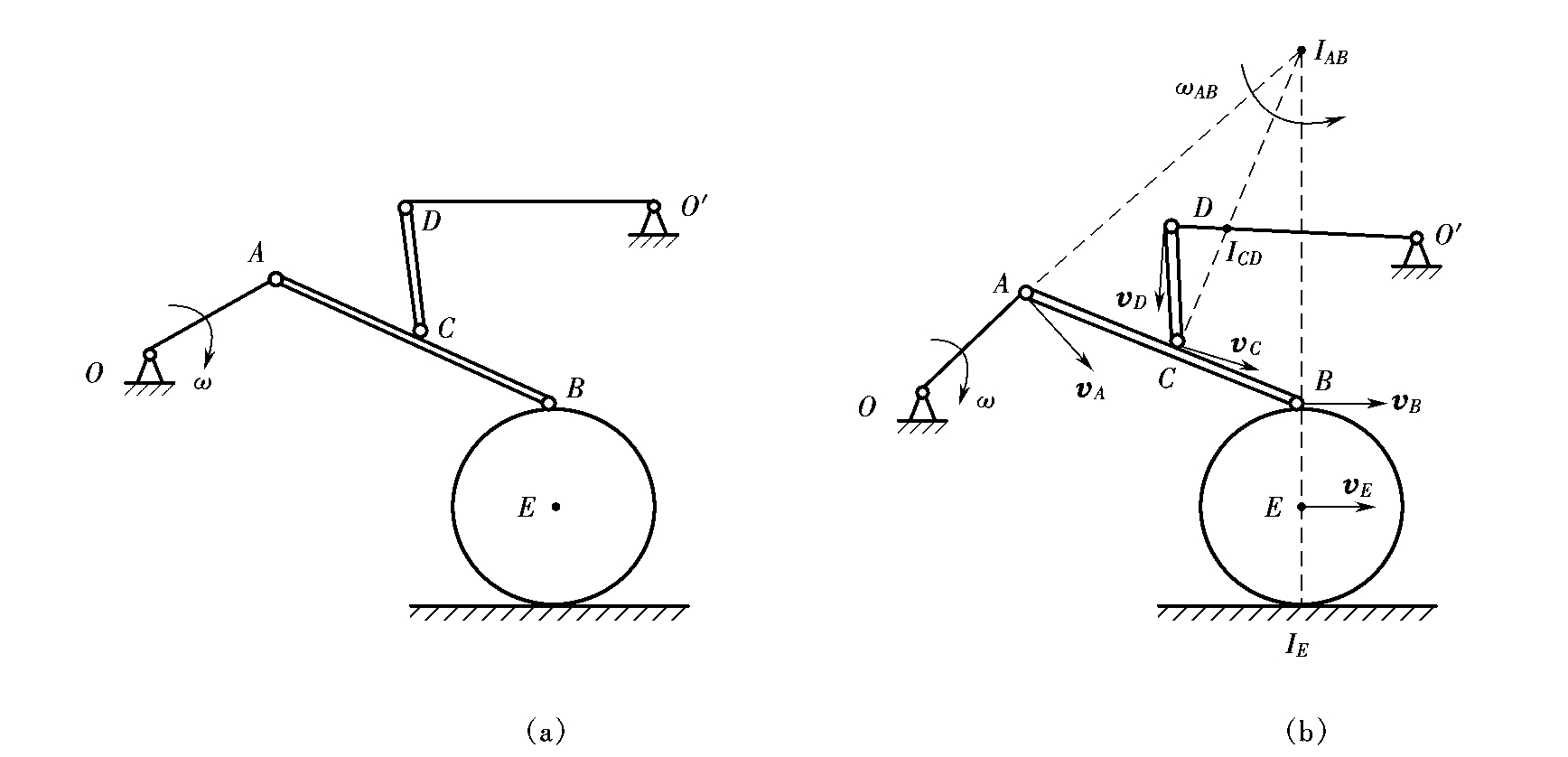
图4.2-25
解:杆OA、DO'分别绕O轴和O'轴作定轴转动,杆AB、CD和轮E都作平面运动。因轮E作纯滚动,则轮与轨道接触点IE即为轮的速度瞬心;因已知杆OA转动角速度ω,所以A点速度vA垂直OA顺ω转向,如图4.2-25(b)所示;OA和IEB相交于IAB点,此点即为杆AB的速度瞬心,且由vA方向可知杆AB的角速度ωAB转向为逆时针方向,所以vB垂直BIE向右;同时C点速度vC垂直CIAB向右;D点速度方向垂直DO',则杆CD的速度瞬心在CIAB与DO'的交点ICD上;由vC方向可知杆CD的角速度ωCD转向为逆时针方向,所以vD垂直DO'向下;由vB知轮顺时针方向转,所以vE水平向右。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。










