



13.2 声表面波检测
13.2.1 声表面波检测的物理基础
声表面波(Surface Acoustic Wave,SAW)是沿物体表面传播、透入深度浅的弹性波,通常由叉指换能器(Interdigital Transducer,IDT)激发产生。IDT由于声电转换损耗低,设计灵活且制造简单,并容易工作在0.5~3GHz的范围内,已经成为激发与检测声表面波的主要技术。
1.叉指换能器的基本结构
IDT是在压电基片上真空蒸发淀积一层金属薄膜,再用光刻方法得到若干电极,这些电极条互相交叉配置,两端由汇流条连在一起,形状如同交叉平放的两排手指,叉指电极由此得名,其基本结构如图13-9所示。

图13-9 叉指换能器的基本结构
IDT有如下几个几何参数:叉指电极的指对数N,电极宽度a,电极间距b,叉指周期T=2a+2b。均匀(或非色散)IDT的电极宽度a和电极间距b相等,即a=b=T/4。两个相邻电极构成一个电极对,其相互重叠的长度为有效指长,称为换能器的孔径W。若换能器的各电极对重叠长度相等,则称为等孔径(等指长)换能器。
2.叉指换能器激励SAW的物理过程
利用压电材料的逆压电与正压电效应,IDT既可用作为发射换能器,用来激励SAW,又可作为接收换能器,用来接收SAW,因而这类换能器是可逆的。
当在发射IDT上施加适当频率的交流电信号后,压电基片内所出现的电场分布如图13-10所示。该电场可分解为垂直与水平两个分量(EV和EH)。由于基片的逆压电效应,这个电场使指条电极间的材料发生形变(使质点发生位移)。EH使质点产生平行于表面的压缩(膨胀)位移,EV则产生垂直于表面的剪切位移。这种周期性的应变就产生沿IDT两侧表面传播出去的SAW,其频率等于所施加电信号的频率。一侧无用的波可用一种高损耗介质吸收,另一侧的SAW传播至接收IDT,借助于正压电效应将SAW转换为电信号输出。

图13-10 叉指电极下某一瞬间电场分布
13.2.2 声表面波检测的基本原理
外界因素(即被测参量如温度、压力、磁场、电场、气体等)对声表面波的传播特性会产生影响,利用这些影响可以制成各种类型的声表面波传感器。声表面波传感器是一种将声表面波技术与电子技术结合起来的新型传感器,它将各种非电量信息(温度、压力、磁场强度、流量、加速度等)的变化转换为声表面波振荡器振荡频率的变化。

图13-11 延迟线型SAW振荡器
声表面波传感器的核心是SAW振荡器,SAW传感器的工作原理就是利用SAW振荡器这一频控元件受各种物理、化学和生物量的作用而引起振荡频率的变化,通过精确测量振荡频率的变化,来实现检测目的的。SAW振荡器有延迟线型(DL型)和谐振器型(R型)两种。
延迟线型振荡器由声表面波延迟线和放大电路组成,如图13-11所示。激励输入换能器T1激发出声表面波,传播到T2转换成电信号经放大后反馈到T1,以便保持振荡状态。它应满足包括放大器在内的环路相位必须是2π的正整数倍的振荡条件,即

式中,f——振荡频率;
l——声表面波传播路程,即T1与T2之中心距;
VR——声表面波速度;
φ——包括放大器和电缆在内的环路相位移;
n——正整数,通常为30~1000。
当φ不变时,外界被测参量变化会引起VR、l值发生变化,从而引起振荡频率改变Δf:

因此,根据Δf的大小即可测出外界参量的变化量。
谐振器型振荡器结构如图13-12所示。SAW谐振器SAWR由一对叉指换能器与反射栅阵列组成。发射和接收叉指换能器用来完成声—电转换。当发射叉指换能器上加以交变电信号时,相当于在压电衬底材料上加交变电场,这样材料表面就产生与所加电场强度成比例的机械形变,这就是所谓的声表面波。该声表面波在接收叉指换能器上,由于压电效应又变成电信号,经放大器放大后,正反馈到输入端。只要放大器的增益能补偿谐振器及其连接导线的损耗,同时又能满足一定的相位条件,这样组成的振荡器就可以起振并维持振荡。其振荡频率f为

图13-12 谐振器型SAW振荡器

式中T为叉指电极周期长度。
因此,外界待测参量变化时会引起VR、T变化,从而引起振荡频率改变

所以,测出振荡频率的改变量,就可以求出待测参量的变化。以上就是SAW传感器的基本原理。
13.2.3 声表面波检测技术的应用
1.声表面波温度传感器
SAW温度传感器是根据温度变化会引起表面波速度改变从而引起振荡频率变化的原理设计而成的。由于外界温度变化所引起的基片材料尺寸变化量很小,在式(13-21)、(13-23)中的后边一项都可以忽略。因此有

选择适当的基片材料切型,可使表面波速度VR只与温度T的一次项有关:

式中,T0为参考温度。
将式(13-24)代入式(13-25)可得

即振荡频率变化率与温度变化率之间呈线性关系。若预先测出频率-温度特性,则由振荡频率的变化量可检测出温度变化量,从而得到待测温度T。
为了获得较高的灵敏度,应选择延迟温度系数大、表面波速小的基片材料,如石英、铌酸锂(LiNbO3)、锗酸铋(Bi12GeO20)等单晶。石英衬底的温度传感器较成熟,典型切割方向是JCL和LST切型,其灵敏度可达2.2kHz/K和3.4kHz/K,固有分辨力约0.0001℃,具有较好的线性度和较高的灵敏度。
SAW温度传感器可以制成接触式和非接触式两种。前者要求将传感器与被测物体直接接触。由于基片、电池与元件的限制,接触式测量温度不能太高,同时会破坏被测温度场的分布,因此有一定局限性。非接触式温度传感器不要求将传感器与被测物体接触,具有更大的优点。它主要是利用被测物体辐射出的红外线使SAW振荡器的传播通路的表面温度升高,引起振荡频率发生变化,通过测量振荡频率的变化来获得温度变化值。由于这种采用测辐射温升方式,接收红外辐射部分的热容必须很小,否则灵敏度不高。另外,在室温附近测量温度时,易受环境温度影响,所以应使用两个振荡频率相同的元件进行差分,并将它们安装在同一个底座上封入同一外壳中。它们的振荡频率相同,一个作为温度探头,另一个作为频率参考,将其混频后取出频率差即可。
利用非接触式SAW温度传感器可制成远距离温度无线遥测系统,其系统结构框图如图13-13所示。其中SAW振荡器和振荡元件构成温度传感器,输出信号通过小型简易天线发射出去,接收信号通过外差法变成低频,并用IC计算器计频,计数器的输出送入微机并转化为温度值显示出来。
由于SAW温度传感器具有高稳定性和高灵敏性,在军用及民用领域颇具潜力,可广泛应用于光学仪器、兽医、农业及无线电信号传输等诸多领域。可用于气象测温、粮仓多点测温、火灾报警及空调、冰箱的控温等。在医学领域中,可用于对癌症进行准确无误的诊断。

图13-13 SAW温度遥测系统框图
2.声表面波气体传感器
SAW气体传感器是比较复杂、涉及面比较广的传感器类型。它以SAW元件为基底材料,在其上形成选择性气体敏感膜并配以外部电路而构成,其结构如图13-14所示。敏感膜处于SAW传播通道上,当敏感膜吸附气体分子与气体结合时,会引起膜密度和弹性性质等发生变化,从而使表面波速度VR发生变化,结果导致振荡频率f变化。通过检测振荡频率的变化量即可测出被吸附气体的浓度。

图13-14 SAW气体传感器结构
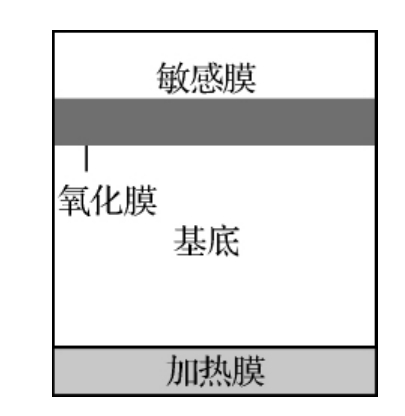
图13-15 薄膜型SAW气体传感器结构
薄膜型SAW气体传感器的工艺结构如图13-15所示。在基底材料背面淀积一层加热膜,基底正面淀积一层掺催化金属的敏感膜(或在形成敏感膜后再采用淀积一层薄的催化金属)。敏感材料和催化金属材料视检测要求而定,如氧化锡掺TbO2可提高对一氧化碳的灵敏度而降低对氢气的灵敏度;氧化锡掺1.5%钯时,传感器对甲烷的灵敏度高于一氧化碳,而当钯含量为0.2%时,对一氧化碳敏感度高于甲烷。若将一些相同的或不同的多种SAW传感器集成在同一芯片上构成传感器阵列,则有利于提高传感器的可靠性和多功能性,能快速地分析有毒、有害、易燃、易爆的混合气体。SAW气体传感器的基片材料可采用ST-石英、YZ-LiNbO3、YX-LiNbO3、ZnO-Si,器件结构有双延迟线振荡器、单延迟线振荡器和谐振器振荡器,可探测SO2(YZ-LiNbO3基片,三乙醇胺,酞花菁)、NO2(ST-石英基片,酞花菁;YZ-LiNbO3基片,酞花菁;YX-LiNbO3基片,铅酞花菁)、H2S(YZ-LiNbO3基片,氧化钨;三乙醇胺)、NH3(ST-石英,铂)、CO、CH4(YZ-LiNbO3基片,酞花菁)、H2(ST-石英;YZ-LiNbO3、钯)、水蒸气(ST-石英,聚合物;ZnO-Si,聚合物)、水(YZ-LiNbO3,吸湿聚合物)、丙酮等。利用气相层析装置可检测出低浓度违禁品,如三硝基甲苯、季戊四醇-四硝酸脂、可卡因、海洛因、大麻等,也可用于监测大气中CO2的浓度以及化工过程控制、汽车尾气排放等。
SAW气体传感器在环境监测、化工过程控制、汽车排放尾气控制、临床分析等领域大有用武之地。目前美国、日本、德国、意大利等国已经投入了大量的人力和物力开发SO2、水蒸气、丙酮、甲醇、H2、H2S、NO2等SAW气体传感器,其实用化已经指日可待。
3.声表面波压力传感器
SAW压力传感器的工作原理是基于SAW器件在基底压电材料受到外界作用力作用时,材料内部各点的应力发生变化,通过压电材料的非线性弹性行为,使材料的弹性常数、密度等随外界作用力的变化而变化。由于SAW在压电材料表面的传播速度v与材料的弹性模量E和材料的密度ρ的关系为v=(E/ρ)1/2,从而导致SAW传播速度的变化。同时,压电材料受到作用力作用后,使SAW谐振器的结构尺寸发生变化,从而导致SAW的波长λ改变。由于SAW谐振器的谐振频率f=v/λ,所以v与λ之变化共同导致谐振频率f的变化。通过测量频率的大小,就可得知外界压力的大小,从而实现压力的精确测量。

图13-16 SAW压力传感器原理图
传感器基片材料可采用40°旋转Y-石英、SiO2、LiNbO3、ZnO等,也可用单晶硅作膜片,在其上形成压电薄膜构成。振荡器可用延迟线型振荡器、谐振器型振荡器。SAW延迟线型压力传感器结构如图13-16所示,将两个SAW延迟线分别连接到放大器的反馈回路中,构成输出频率信号相近的SAW振荡器,使其环境温度保持一致,可近似认为它们的振荡频率随温度的变化量相等,使其中一个在所测压力下工作,另一个所受压力不变。将两路输出的频率经混频、低通滤波和放大,得到一个与外加压力有对应关系的差频信号输出。这种传感器在l~100kPa范围内线性较好,压力灵敏系数为0.55×10-9Pa/cm2。由于SAW谐振器型的Q值比SAW延迟线型的Q值高得多,因此SAW延迟线型的传感器的灵敏度和稳定性没有谐振器型传感器好。
SAW压力传感器的主要问题是基片材料对温度的敏感性大于对压力的敏感性。比如Y-石英基片的压力灵敏性为1000ppm,而温度灵敏性可达4000ppm,因此必须考虑温度补偿问题。高精度SAW压力传感器研究开发的重点在于如何在较宽的温度范围和较大的压力范围内,保持小的温度漂移。
SAW压力传感器已经广泛应用于信号处理、雷达、通讯、电子对抗和广播电视领域。在医学上,可用来监视病人的心跳,用射频振荡器把信号发射出去,实现遥测;还可用来控制汽车的点火,以保证燃料的充分利用,减少污染;可监测汽车轮胎的压力;可做成水下听诊器,监测水下动静;还可用于防盗报警等。利用压力-振荡频率的敏感机理,还可制成SAW加速度传感器、电压传感器,可用于导航、航天制导系统,具有很高的精度。
除了上面介绍的几种传感器,常用的还有声表面波湿度传感器、声表面波质量传感器、声表面波流量传感器和声表面波陀螺等。此外,声表面波还可以用于金属标签的识别,在自动路桥不停车收费、移动工件识别、门禁等系统中的应用将产生很高的经济和社会效益。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。









