



一种陆标定位训练平台的开发
刘小虎 吴岿华
(海军工程大学管理工程系,湖北武汉430033)
摘 要:本文提出了一种简单实用的陆标定位训练平台开发方案。该方案使用工控机的串口资源,分别控制沙盘系统,分罗经系统,以及LED电子屏系统,给出了沙盘控制系统的自定义协议通讯方法,分析了模拟罗经的控制软件流程。该系统目前在实际教学中得到了较好的评价。
关键词:陆标定位 单片机 串口通讯
陆标定位训练平台对于航海基础的训练教学非常重要。陆标定位的五个关键步骤是:认、选、测、绘、填。为了让学员熟练掌握陆标定位的五个关键环节,一般采用训练室教学结合海上航行教学两种手段。海上航行教学以海上的真实岛屿等为测量对象,实测船只的位置,教学效果比较好,但是海上航行教学成本高,而且很多学员在海上实习前由于没有很好掌握陆标定位的技能,因而海上训练的效果就打了很大的折扣。为了解决这个问题,必须让学员在航行实习前在陆标定位训练平台进行大量模拟训练。本文给出了一种简单经济的陆标定位训练平台开发方案。
1 系统框图
陆标定位训练的核心是以目标沙盘代替海上的真实物标,同时根据相对运动原理,采用两个步进电机拖动沙盘运动来模拟舰艇的运动,陆标定位训练平台由控制台、分罗经、沙盘系统和LED显示四个部分组成。系统如图1所示。

图1 陆标定位训练平台结构
2 沙盘拖动控制系统
采用横轴步进电机X和纵轴步进电机Y两个步进电机来拖动沙盘,根据步进电机的功率、控制精度要求,选用了合适的步进电机驱动器。步进电机的控制则采用了非常廉价经济的单片机89C51,工控机经过电子海图模型计算出船只的速度、航行等信息,并且将这些信息转化成X轴电机和Y轴电机的运行速度指令和运行距离指令,这些指令通过工控机的串口RS232与单片机进行通讯联系,单片机接收到串口送来的指令后,转换成控制脉冲输入步进电机驱动器。步进电机控制系统如图2所示。
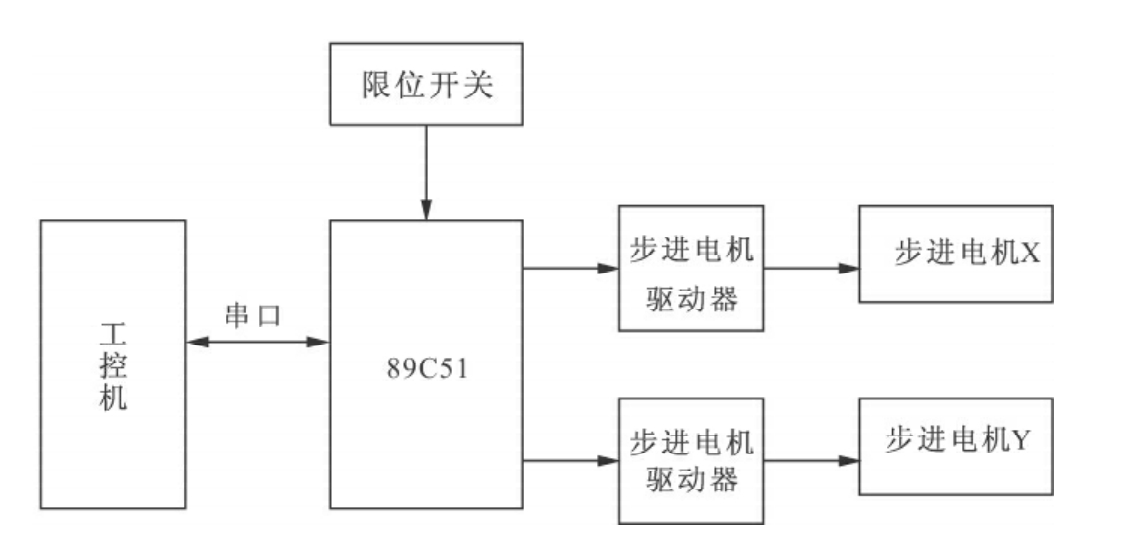
图2 沙盘拖动控制系统
工控机发出的串口指令数据格式定义如下。
首先所有的参数和命令均采用10个字节,其中:运行命令为AA55AA0155;停止命令为AA55AA0255;自检命令为AA55AA0455;速度设定AA55AA03XX,缺省XX=0,速度为16节。四个象限的偏移量均用3个字节表示,A表示正方向,5表示负方向。
具体格式设定如下:
第一象限AXXX20AXXX;第二象限5XXX20AXXX
第三象限5XXX205XXX;第四象限AXXX205XXX
下位机回送的ACK数据格式比较简单,长度为4个字节,前两个字节为AA,后两个字节依次为:01第一象限数据正确,02第二象限数据正确,03第三象限数据正确,04第四象限数据正确;05运行命令;06停止命令;07自检命令;08速度设定正确;09计划航线执行完毕;0A电机运行超出边界。
为了保证通讯的可靠性,上位机发送命令或者参数,下位机收到数据后,先进行数据检查,数据如果认定有效之后,回送一个应答信号ACK,表示收到了的正确的命令和参数。而上位机收到了来自下位机的应答信号后,本次通讯就正常结束EOT。通讯正常情况下流程图如图3所示。
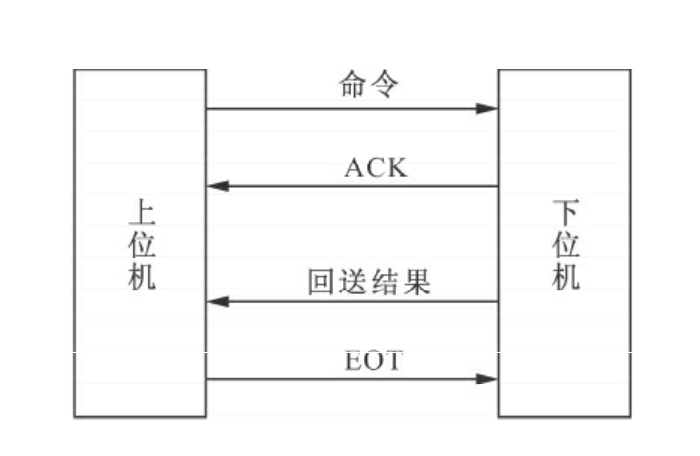
图3 通讯流程
由于拖动沙盘的两个电机运行在两个相互垂直配置的轨道上,轨道的长度必然受限制,因此两个电机的运行不能超出轨道范围,否则发生脱轨就会损坏沙盘。为了防止电机运行超出边界,采用了两级措施:首先在软件层次,实时计算两个电机的位置,一旦将要出界,则发出停机指令,使电机停止运行;其次在硬件层次,在轨道上配置了4个位置传感器,当位置传感器检测到电机将要出界时,送出中断信号给单片机,使系统停止运行。X轴轨道位置传感器的配置如图4所示。

图4 位置传感器配置
位置传感器配置在轨道边界的侧面,当拖动沙盘的滑轮经过传感器时,传感器就会送出中断信号,由于沙盘与工控机的距离有15m左右,为了提高传感器信号的抗干扰能力,传感器采用了24V供电,由于传感器输出位集电极开路方式,因此其输出通过电阻上拉到5V就可以送到单片机的I/O引脚了。
3 模拟罗经驱动系统设计
实际的分罗经信号来源于主罗经,而一套主罗经价格非常昂贵,这里采用了模拟罗经的方式,模拟航海罗经有单片机、步进电机、自整角机和其驱动电路形成闭环控制系统。模拟罗经的控制如图5所示。

图5 模拟罗经驱动控制
步进电机作为模拟罗经的执行元件,用来驱动表盘的转动,因此,对其主要靠转动方向的脉冲和转动位置的脉冲来完成。如果在单位时间段内,航向变化频率是不同的,这就需要不同频率的信号源实时驱动步进电机的转动。由于自整角机与步进电机通过齿轮连接,步进电机的转动也带动了自整角机的转动。模拟罗经的控制软件流程如图6所示。

图6 模拟罗经软件流程
4 控制台软件设计
工控机是整个训练平台的大脑,主要工作如下:用户通过模拟电子海图系统设定了计划航线后,根据计划,计算出每个航线的航向、航速、每个航线的经度差、纬度差;然后根据航向信息控制模拟罗经系统;根据航速、每个航线的经差、纬差控制沙盘拖动系统,最后输出一些提示信息方便学员填写航海日志。工控机采用VC6进行编程,调试步进电机界面如图7所示。

图7 步进电机控制界面
5 结束语
本文设计了一种简单实用的陆标定位训练平台,该训练平台能够满足陆标定位的训练需要,工作可靠,模拟训练效果好,具有一定的应用前景。
胡定军,张芊,石红梅.基于DDS的模拟航海罗经控制[J].船海工程,2008(4):114~116.
贾宝贤.圆弧插补的中点判别法[J].机械工艺师,2001(1):14~15.
杨光友.单片微型计算机原理及接口技术[M].北京:人民邮电出版社,2002:26~35.
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。










