



3.1 TCP定点(重定位)
机器人手动操作练习,重定位的作用以及操作。
 机器人工具坐标系是由工具中心点TCP与坐标方位组成。
机器人工具坐标系是由工具中心点TCP与坐标方位组成。
 机器人联动运行时,TCP是必需的。
机器人联动运行时,TCP是必需的。
 机器人程序支持多个TCP,可以根据当前工作状态进行转换。
机器人程序支持多个TCP,可以根据当前工作状态进行转换。
 机器人工具被更换,重新定义TCP后,可以不更改程序,直接运行。
机器人工具被更换,重新定义TCP后,可以不更改程序,直接运行。
 可以通过工具坐标系转换来定义机器人工作为主。
可以通过工具坐标系转换来定义机器人工作为主。
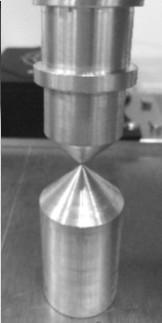
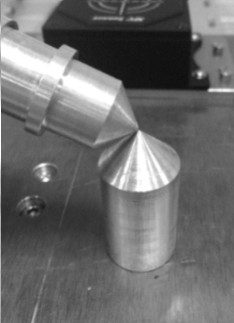
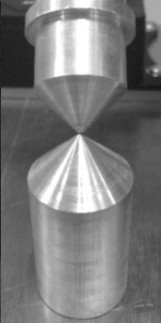
抓取工具1,并且定义工具坐标,通过两条编程指令Move L,Move J来完成前、后、左、右和正上方的对位工作。 最后跟换工具2,在不更改程序的条件下,使其正常工作。

动作1:
动作2:
动作3:
动作4:

工具1:

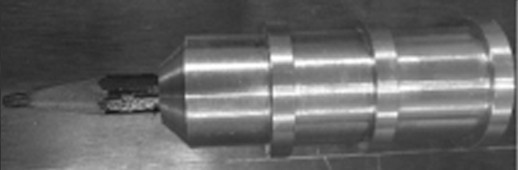
工具2:
本TCP定点应用的操作流程如下图所示。 从机器人启动到定点完毕回到工作原点,本操作选取一系列的示教点,然后在这些示教点之间使用Move L、Move J指令。
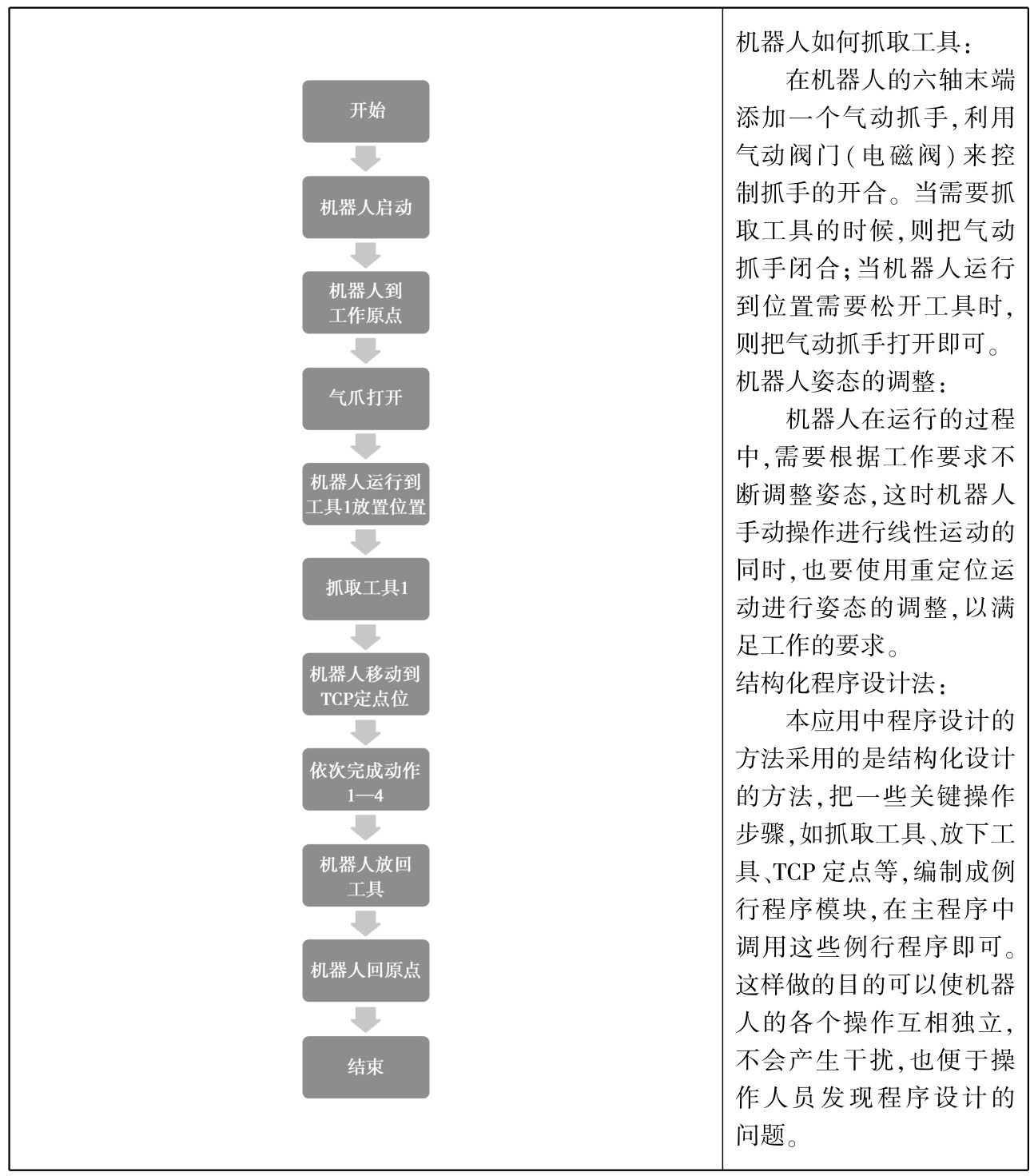
在机器人接近工具时,手动操纵的速度要尽可能慢,在路径上多添加一些示教点,以便加强路径的可控性。
抓取工具或放下工具时,要使机器人垂直上升或下降,这时使用4—6轴调整垂直方向,并且使用动作模式“线性冶来操纵直上直下,避免发生碰撞。
在不同工位调整机器人姿态时,尽量让机器人在路径上便于运动以便调整姿态。
当机器人离开工作区域运动时,可以加快运行速度,节省操纵时间。 这需要在示教编程时根据实际情况来设定。
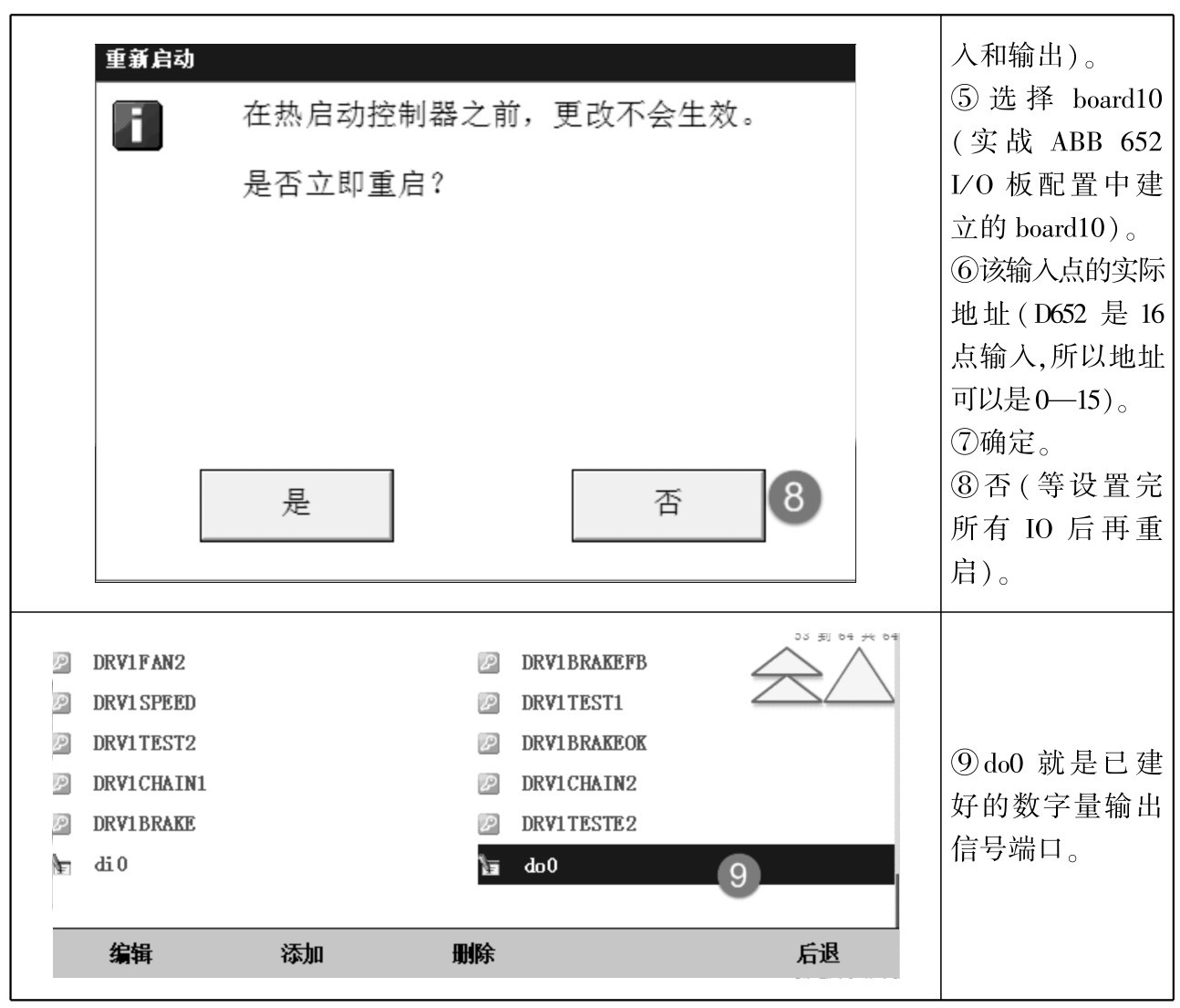
(1)建立IO(抓手)
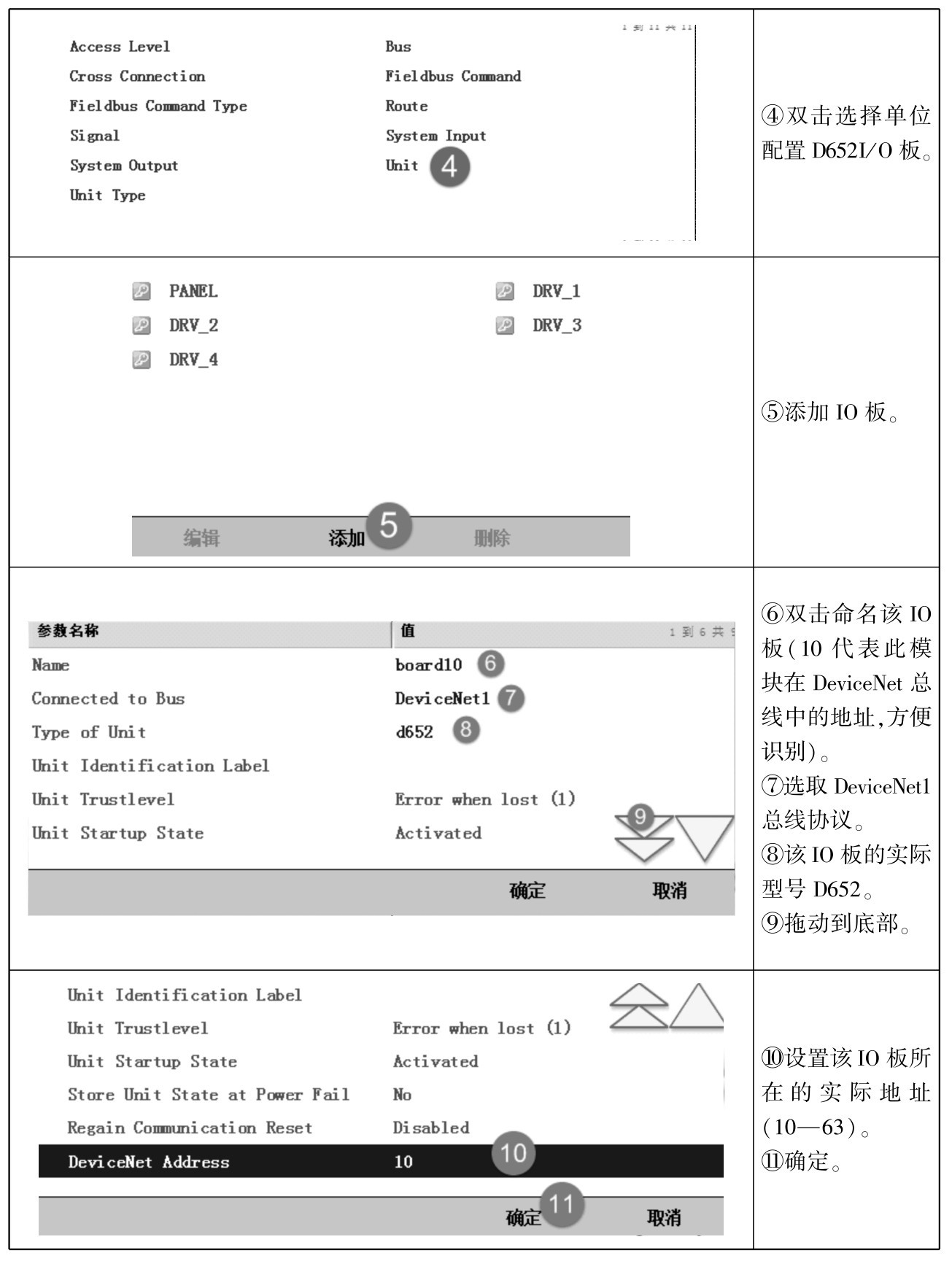
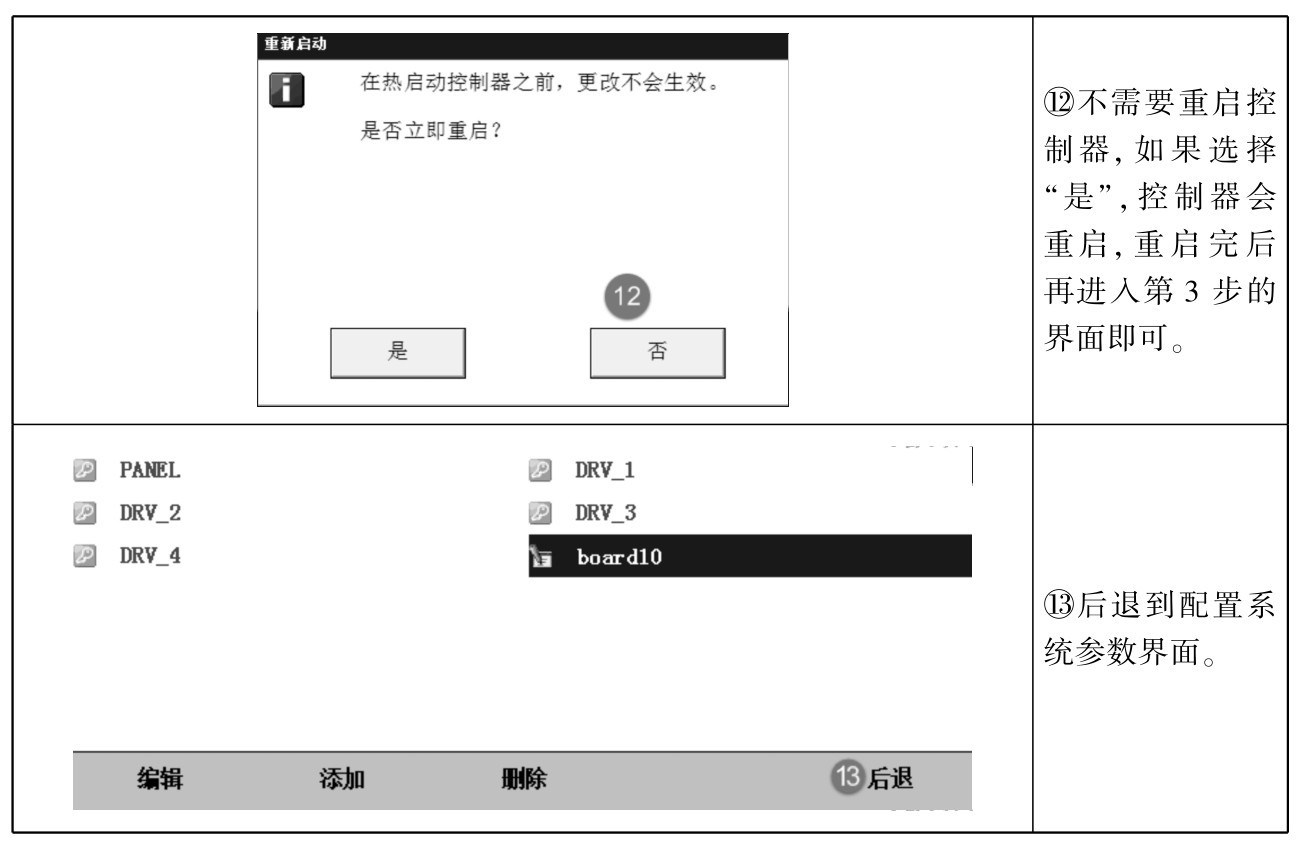
配置D652IO板。

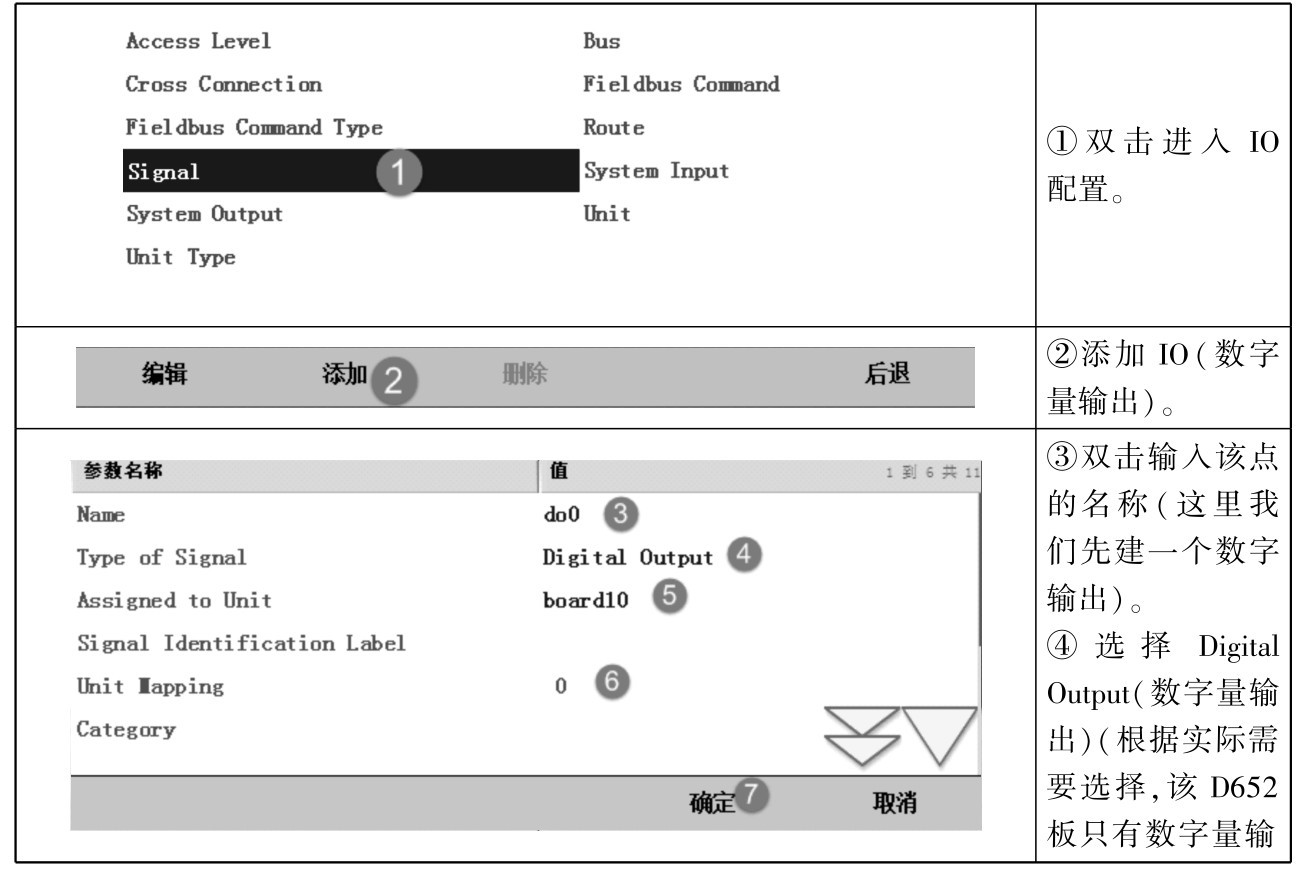
添加抓手控制输出信号do0。
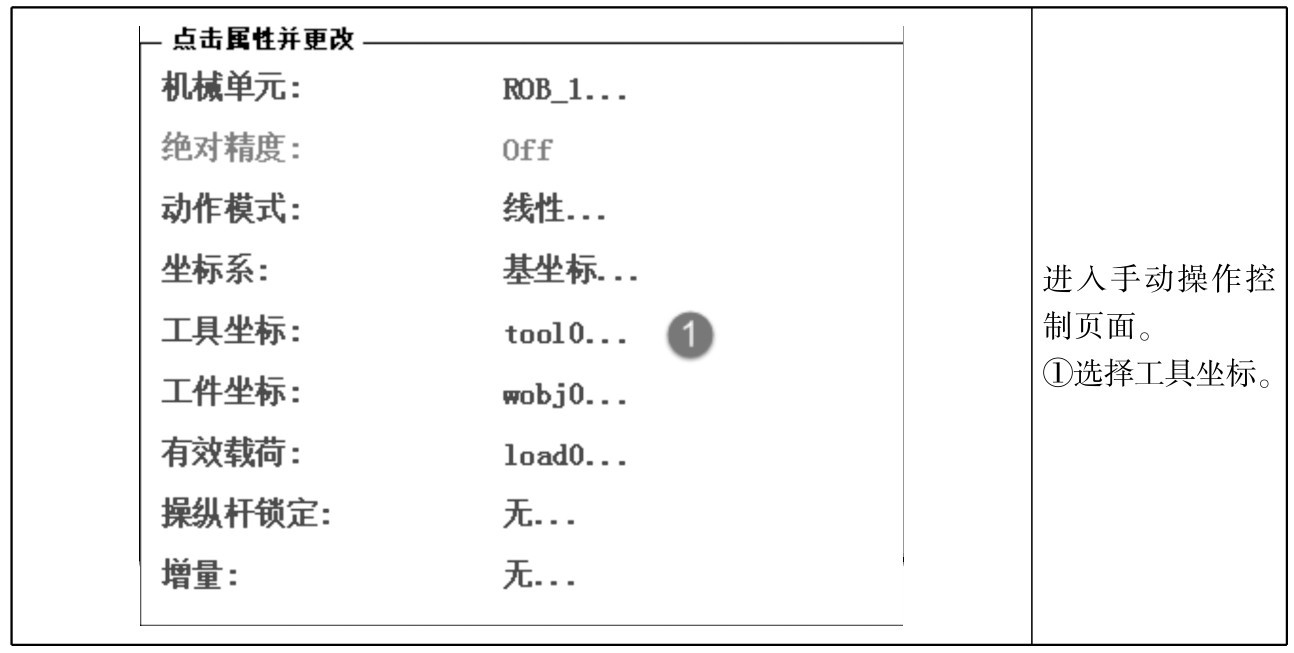
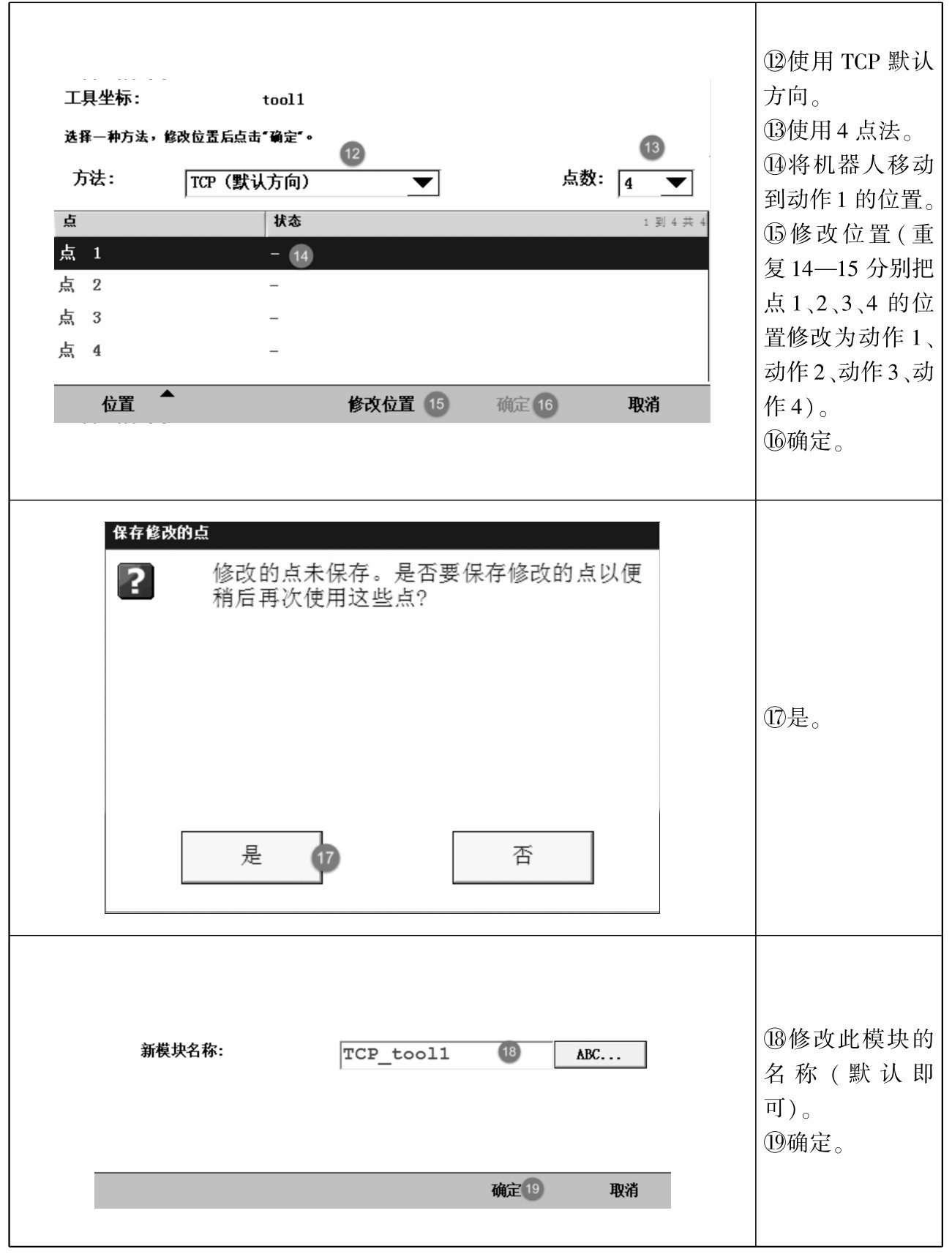
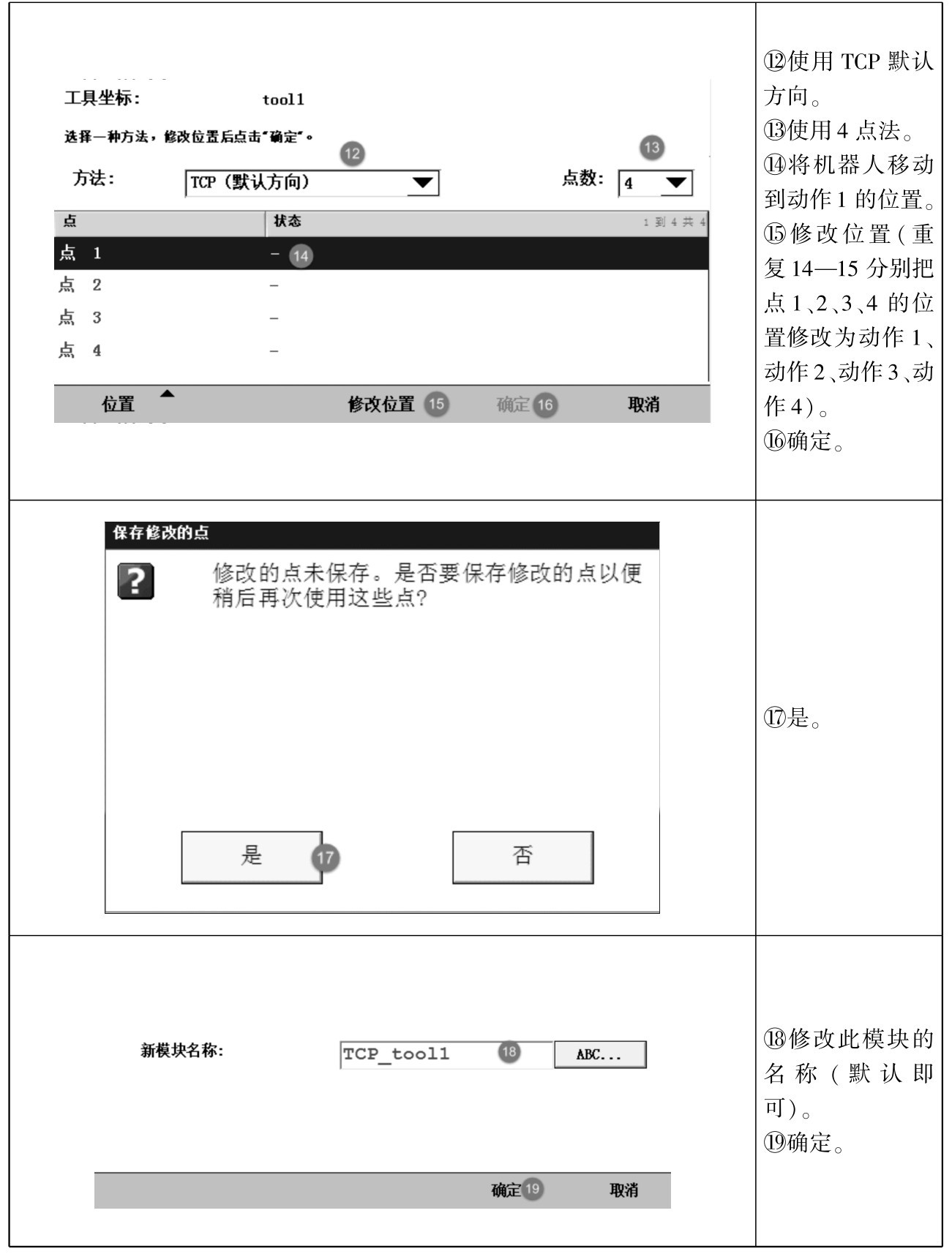
(2)建立工具坐标(3)编程

1)建Main程序和子程序
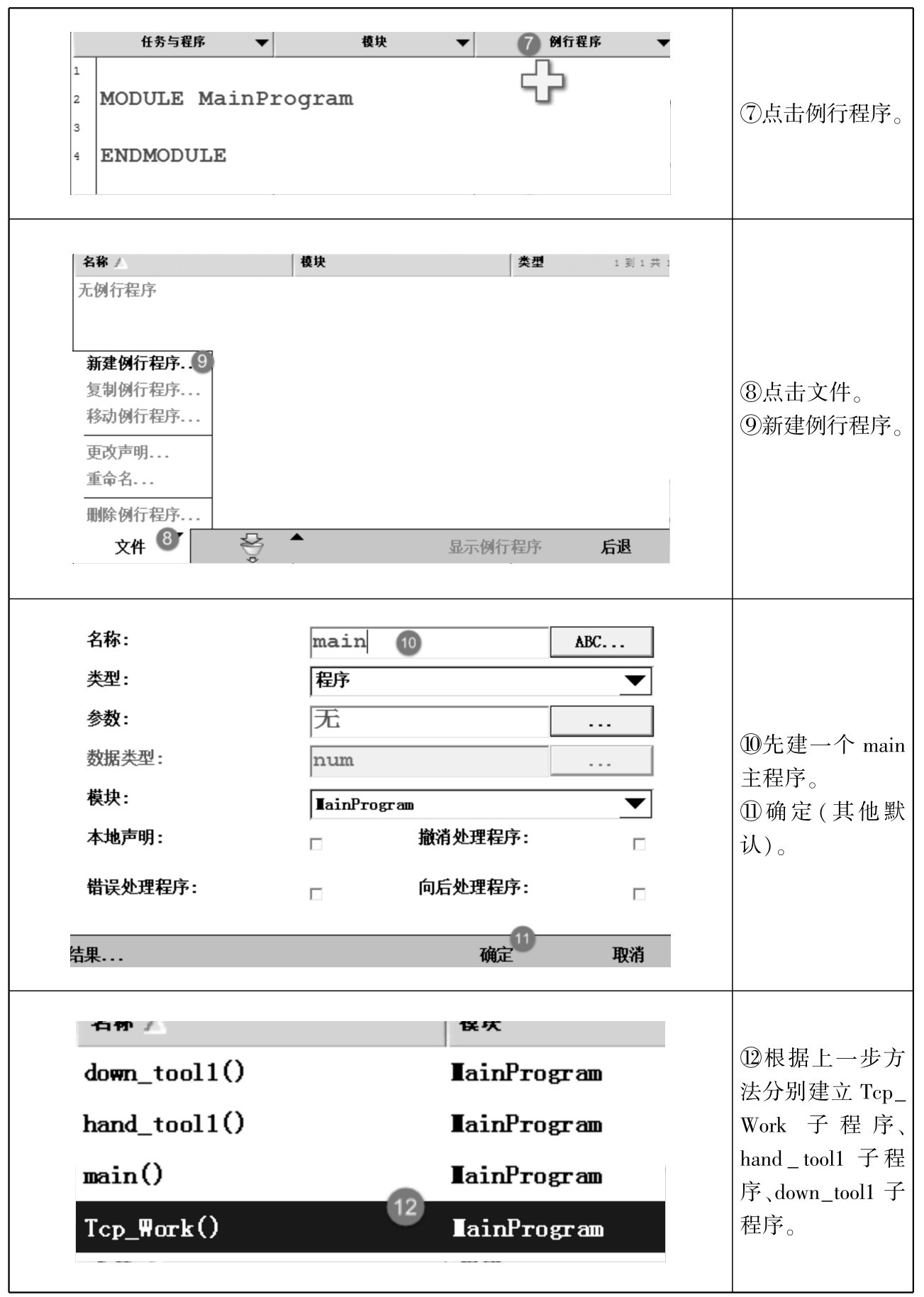
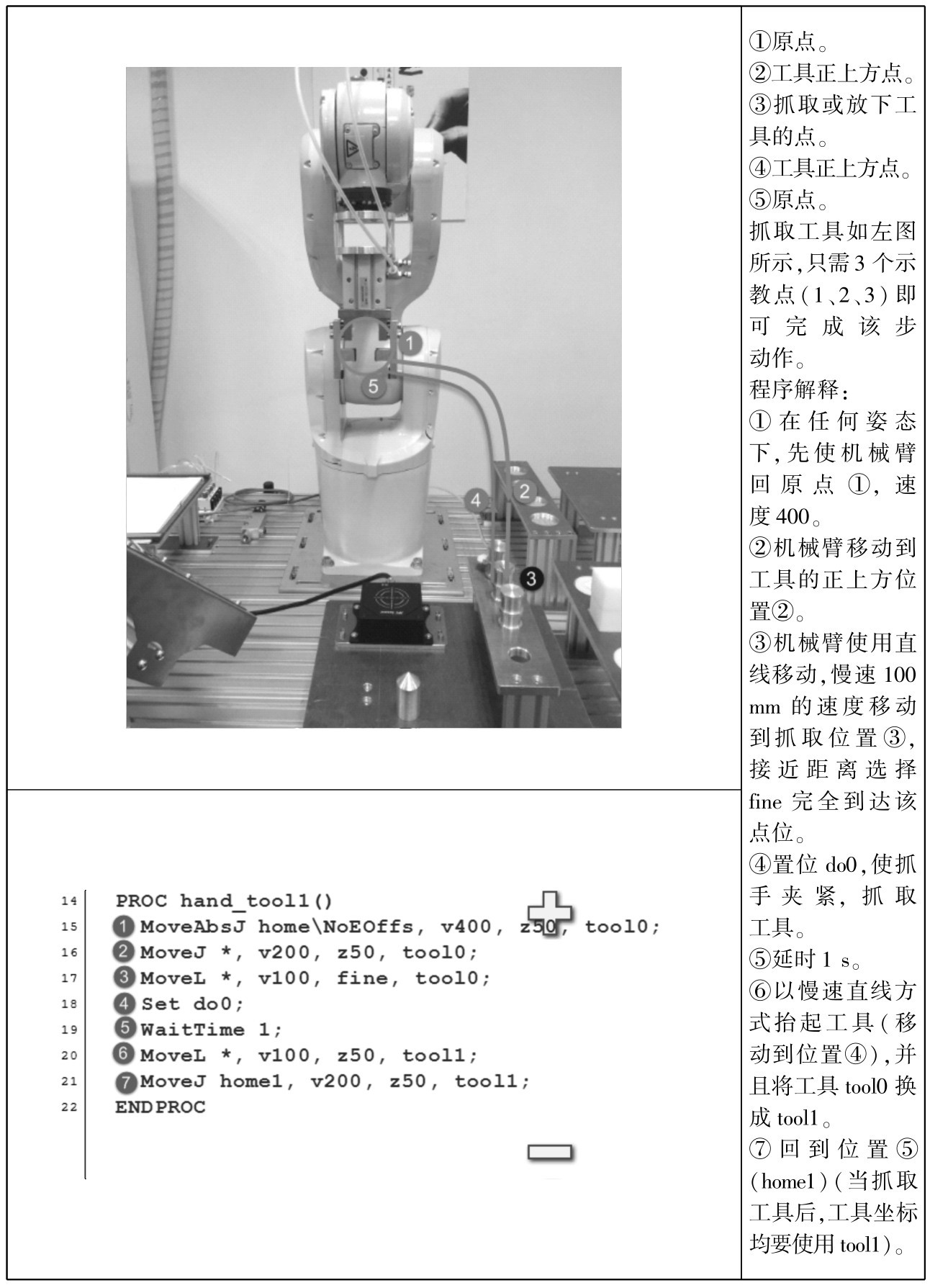
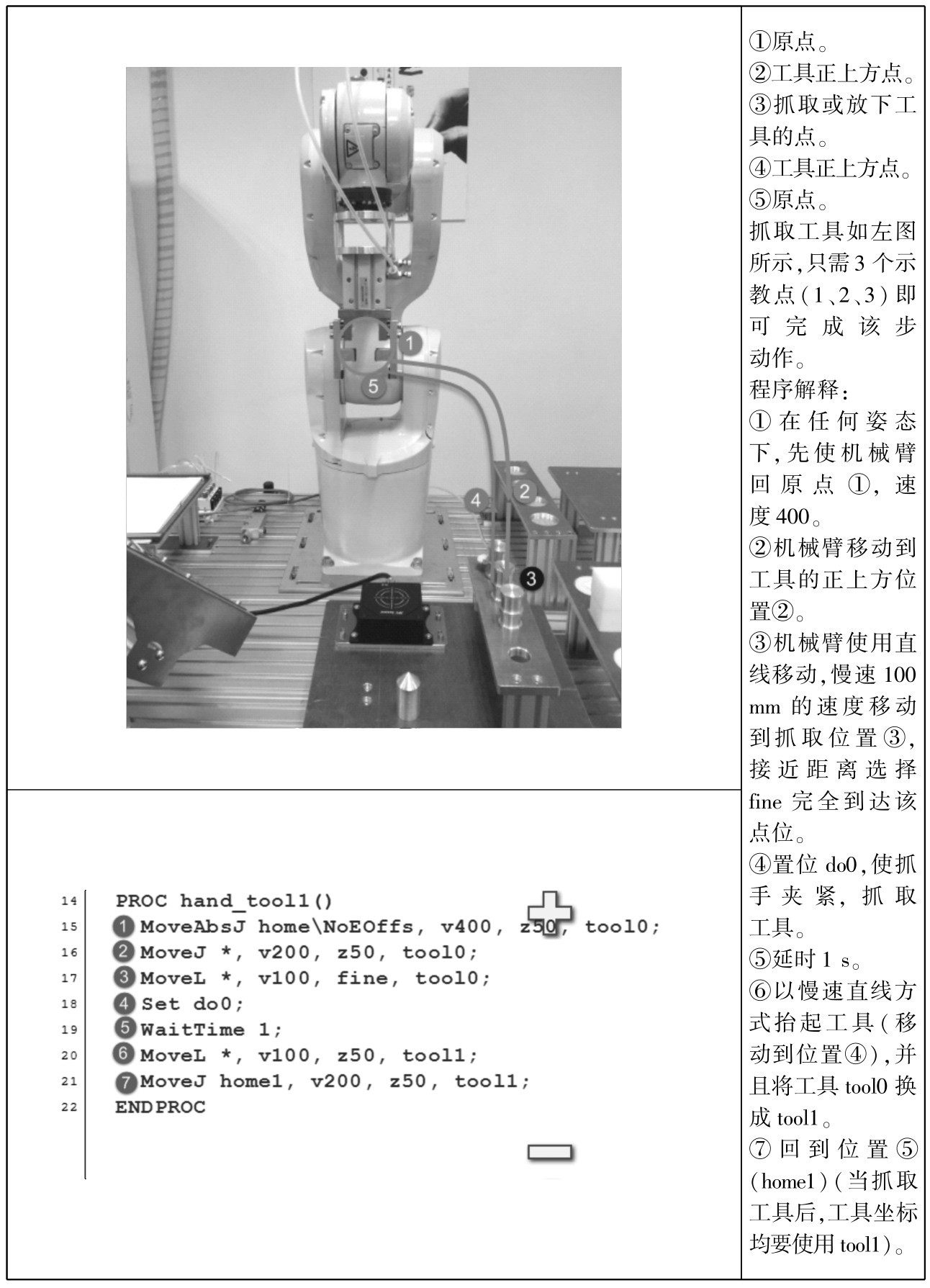
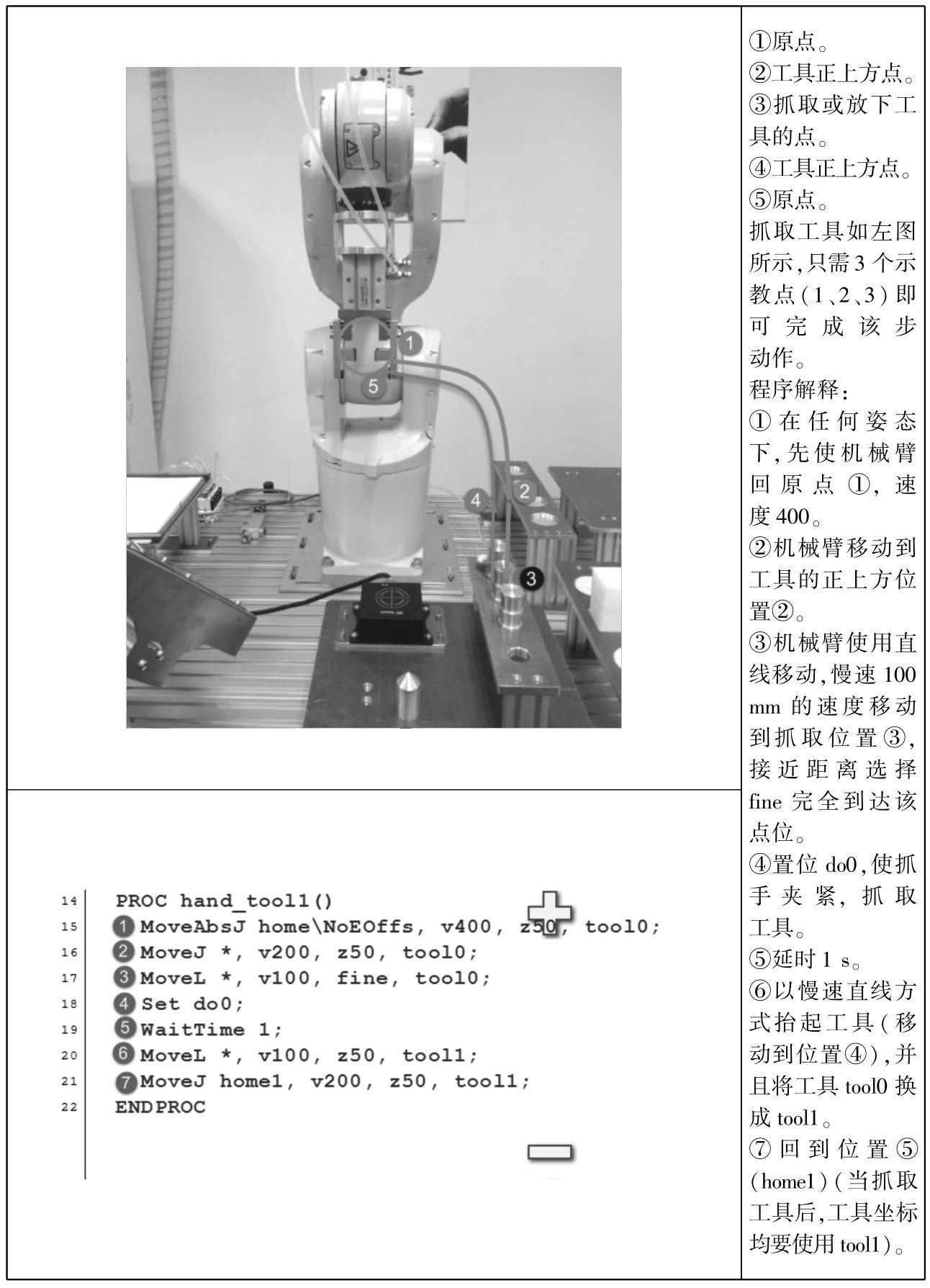
2)编写抓取工具hand_tool1子程序
3)编写放下工具down_tool1子程序
4)编写Tcp_work定点子程序

5)主程序调用

6)任务
尝试使用工具2运行整个程序。

免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。










