



5.7 利用激光脉冲两次回波的高差变化进行分类
脉冲式激光雷达测量系统通过测量激光脉冲回波信号的上升边界和下降边界,经波形分析后可得到激光脉冲的首次回波信号(First Pulse)时刻和尾次回波信号(Last Pulse)时刻,见图5-21,从而对于同一束激光能同时获得两个距离观测值。并且在飞行作业时,能将系统设定为只量测激光脉冲首次回波信号的测距信息,或只量测激光脉冲尾次回波信号的测距信息。目前,有一种系统能够记录同束发射激光的不同回波信号可达4次之多,只要回波脉冲彼此的间距大于2m即可,即系统能区分出不同的反射信号(Maas,1999a)。
目前,已有不少系统能同时记录首次回波信号和尾次回波信号。在同一测区,连续进行两次飞行,一次记录激光脉冲首次回波信号的激光脚点,一次记录激光脉冲尾次回波信号的激光脚点。利用激光脉冲首次回波信号的激光脚点获取未经滤波处理的数字高程模型M1,植被区域会出现局部高程变化较大的现象。而对于道路、
房屋屋顶等人工地物,局部高程变化较小,对应的未经滤波处理的数字高程模型局部变化较小且表现出一定的规律性。类似地,还可利用激光脉冲尾次回波信号的激光脚点获取未经滤波处理的数字表面模型M2。如果能保证一定的穿透率,植被区域的表面高程局部变化仍然较大。在分别获得的M1和M2间求差,如果是植被区域,两次获得的高差差异较大,而如果对应区域是道路或平面屋顶时,两次获得的高程差异会很小或接近于零。基于上述原理,就能区分出森林植被区域。
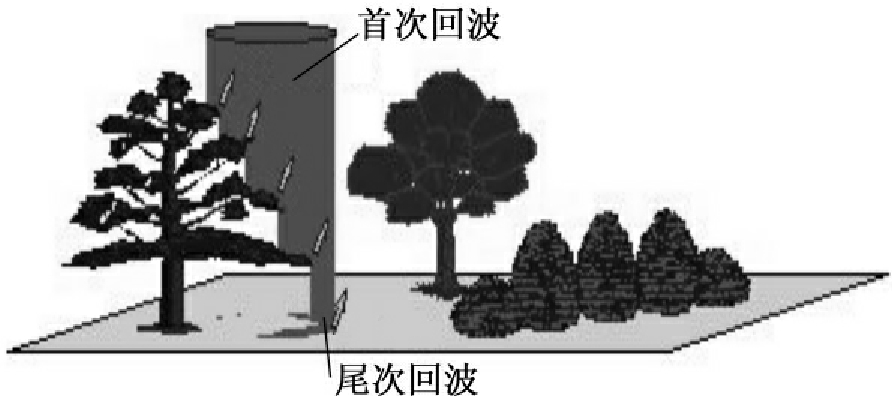
图5-21 首次回波信号与尾次回波信号
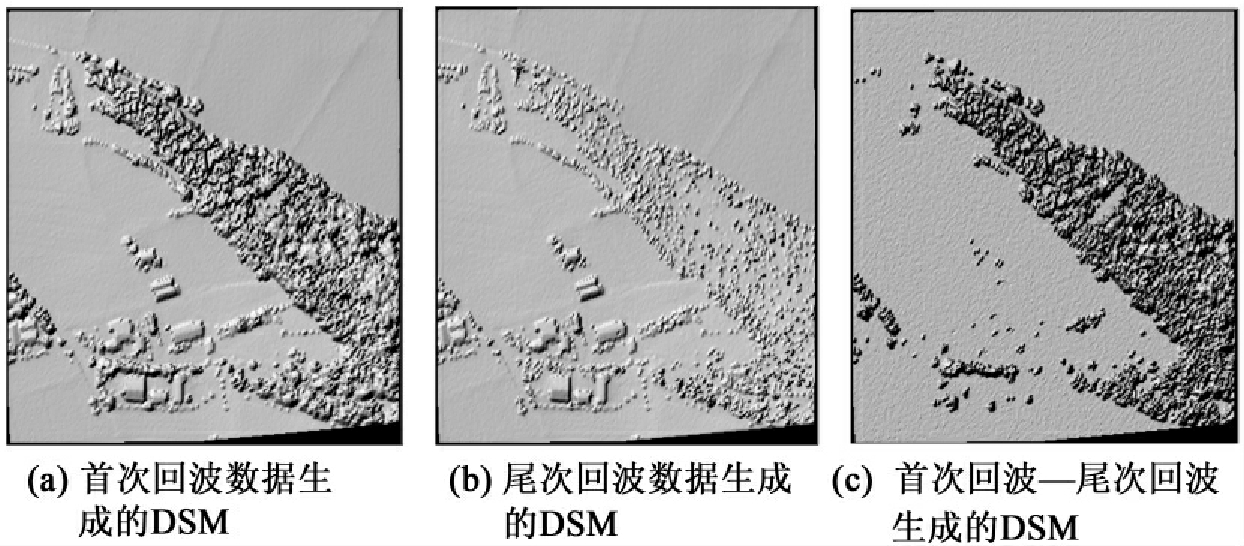
图5-22 首尾两次回波数据获得的DSM比较
图5-22(a)为首次激光脉冲脚点所获得的DSM;图5-22(b)为尾次激光脉冲脚点所获得的DSM;图5-22(c)为首次回波的激光脚点与尾次回波的激光脚点求差后的DSM。结果表明,对于同一束激光脉冲,利用首次回波所获得的高程减去利用尾次回波所获得的高程,在空旷地带和房屋等表面规则的地物,两者的高程差几乎为零,而在植被覆盖地区,特别是树林地带,高程差不为零。因此利用这一特性,很容易将植被和非植被点区分开来。
如果基于前面的滤波处理得到的地物点数据主要区分为人工建筑物和自然植被,那么根据两次回波信号测定的高程之差,就能非常容易地区分出人工建筑物和自然植被。图5-23(见彩图插页)给出了分类的结果,图5-24为对应区域的真实航片。图5-23中,红色的激光脚点表示房屋激光脚点,绿色的激光脚点表示植被激光脚点,在绿色激光脚点簇群中也夹杂了少量的相对孤立的红色激光脚点。其原因是在数据处理算法中,只是按照同一束激光首次回波信号和尾次回波信号获得的激光脚点的高程不同,而认为该激光脚点是打在植被上。实际上,同一束激光打到房屋上,两次回波信号确定的高程应该几乎相等。同一束激光打到植被上时,两次回波信号确定的高程绝大多数会有明显差异,但也不能排除两次回波信号确定的高程几乎相等的情况。因为激光光斑较小,同一束激光可能确实打到某片树叶上,这同激光束打在房屋上的情况就一样了,只有同一束激光打到植被的不同(垂直)部位时,才会产生两次回波信号确定的高程出现明显差异。如果进一步融合激光回波信号的强度信息和高程变化因素,就能把夹杂在绿色激光脚点簇群中的相对孤立的红色激光脚点判定为植被点。当然,如果在单独处理房屋激光脚点时,这些离散的相对孤立的被误分类为房屋的脚点可以利用简单的算法直接剔除,这并没有损失真实房屋脚点的数量。
当然,数据过滤和分类后,还要进行质量控制。任何一种滤波分类算法都不能保证百分之百的正确。分类时,也只能是尽可能的准确。如果要进行后续的地物识别和重建,还要对滤波分类出的地物数据点系列进行一致性检查。检查时,应遵循宁愿剔除可疑点,也不要将它带入到后续处理过程中,以免严重污染数据。这主要是因为滤波分类后,每一小块的激光脚点数据个数有限,数据自身的抗差能力大大降低。
图5-23 对地物点进一步分类成房屋激光脚点和植被激光脚点

图5-24 对应区域的真实航片
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。












