



迭代线性最小二乘内插(预测)法滤波最初由奥地利维也纳大学的Kraus和Pferfer等提出(1998)。在该方法中,DEM内插以及数据过滤同时进行。其核心思想就是基于地物点的高程比对应区域地形表面激光脚点的高程高,线性最小二乘内插后,每个激光脚点的高程的拟合残差(相对于拟合后的地形参考面)不服从正态分布(见图5-4),高出地面的地物脚点的高程的拟合残差都为正值,且残差较大(Pfeifer,et al,1999),该方法需要迭代进行。首先用所有激光脚点的高程观测值按等权计算出初步的曲面模型,该曲面实际上是界于真实地面(DTM)或地物覆盖面(DSM)之间的一个曲面,其结果是拟合后真实地面脚点的残差出现负值的概率大;而植被点的残差有一小部分是绝对值较小的负值,另一部分的残差是正的。然后用这些计算出来的残差υ来给每一个点的高程观测值定权р。稳健估计的权函数关系式为:
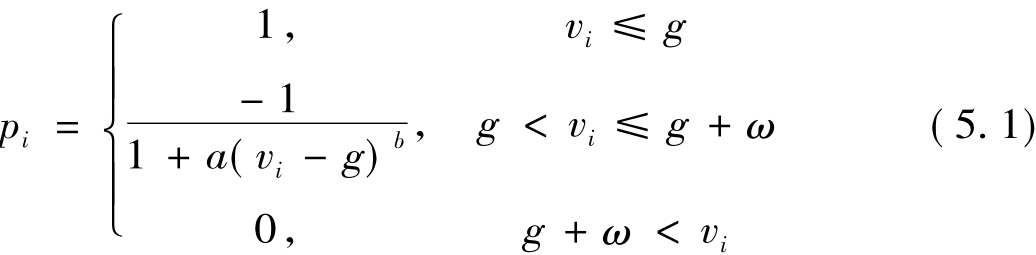
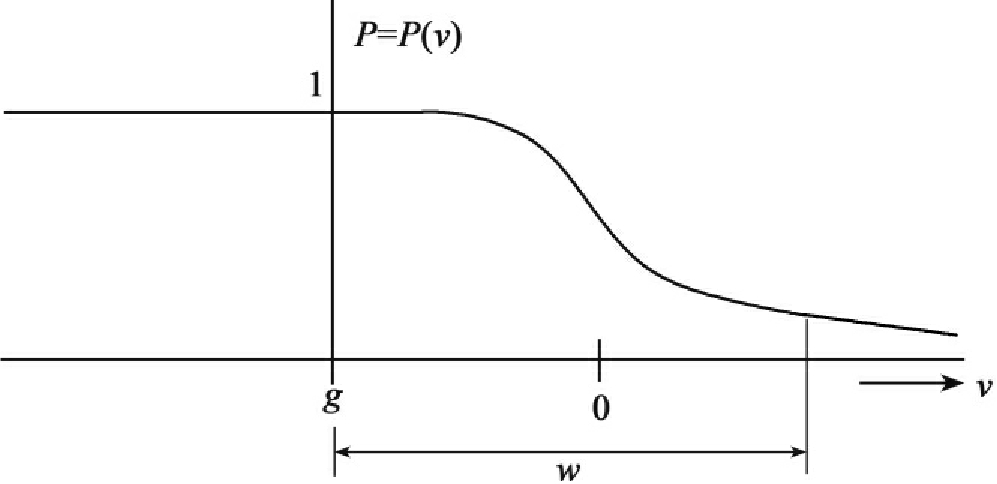
图5-4 定权示意图
式中,参数a和b决定于权函数的陡峭程度,如a、b分别取1和4;参数g选择一个合适的负数,其值可根据残差统计直方图确定(见图5-5)。
计算出每个观测值的权p后,就可以进行下一步的迭代计算。其依据是,负得越多的残差对应的点应赋予更大的权,使它对真实地形表面计算的作用更大;而居于中间残差的点赋予小权,使它对真实地形表面计算的作用更小;对于残差大于g+w的数据点就认为不是地面点给零权而被剔除掉。
当剔除掉这些非地形点重新计算出地形表面后,可重新计算这些被剔掉的点的残差,如果其残差落在本次的观测值的吸收域内
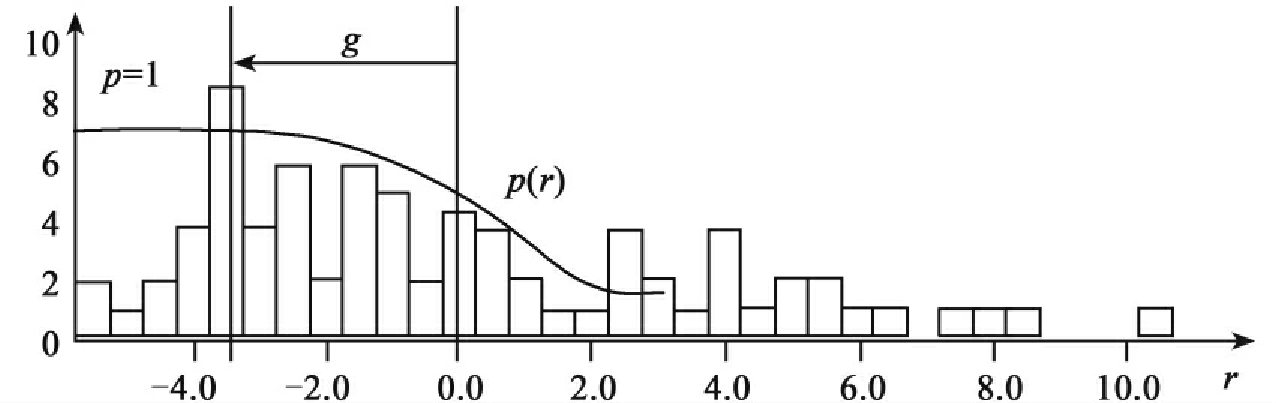
图5-5 线性内插预测一步后的残差分布示意图(地面激光脚点的残差聚集在-3m附近,而植被上的激光脚点的残差能达到10m,观测值的权由权函数p(r)确定)
(v<g+w),那么这些在前一次被判定为非地形点而被剔除的点可重新吸收为地形点。
该方法的缺点是假设地形特征局部水平或点均匀分布。为了保留倾斜地形的地面点,在滤波的过程中,需要不断调整滤波参数,以适应不同的地形类型特征。计算时,整个测区被分成若干块,对于不同的块,a、b、g的取值应该是自适应的。该方法需迭代进行,迭代次数一般为3~4次。该方法在地形陡然起伏的地方不适用;大面积的穿透率低的灌木丛可能被处理为真实地面;通常大型建筑物不能被过滤掉;会出现负的粗差,这就意味着有些激光脚点的高程值比对应地面点的高程还要低。由于该方法吸纳这些点为地面点,因此地面模型出现锥尖朝下的锥状误差。产生这种误差的一个原因就是,激光信号经多次反射而被接收,在水域或城区有可能出现这种误差。当然,由于其他方法也是选取高程低的点为地面点,因此也会出现类似的误差。该方法没有考虑地形断裂线,往往使地形的特征边界变的模糊。另外,该方法参数设置复杂,计算时间长。
该方法相对于其他方法的优势在于能很好地获得地形趋势面。该方法既可以直接利用原始数据进行,也可以对数据进行预先初步的分类;容易进行自动处理;通过调权还可以剔除残差负得特别大的粗差观测值;由该方法获取的数字地面模型的质量较高。
该方法比较适用于稀疏林区DEM或DTM的生成。在山林地带,利用常规的地形测量手段既费时又费力,要高精度快速获取这些地区大范围的DEM几乎无能为力。虽然利用航空摄影测量的手段提高了数据获取的效率,但航摄拍到的只是植被覆盖的顶部,要获取真实地面的DEM需要大量的野外调绘而变得几乎不可能。机载激光雷达测量系统的激光扫描光束能部分地穿过植被覆盖空隙到达地面,并反射回去被系统接收到,从而可以直接获取大量真实地面的激光脚点数据。当然,并非所有扫描光束都能到达地面并反射回去,这主要取决于植被结构、飞行季节(冬天还是夏天)、树种及繁茂程度,这些因素决定着激光脉冲的穿透率,即真实地面激光脚点数量占总激光脚点数的百分比。激光脉冲的穿透率几乎可从100%到0%(Rieger,et al,1999)
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。












