



3.5.2 作业操纵的基本形式
根据推动主分配阀动力源的形式可分为机械杠杆式、气压式、液压式和电器式等。
由于挖掘机所采用的油路流量大、压力高,主分配阀阀杆的推动力也相应加大。因此,采用气压、液压、电器操纵可以减轻操作强度。同时,还可以合理布置系统,以减少不必要的弯曲管路等。
3.5.2.1 机械操纵
目前仍有液压挖掘机采用机械操纵。挖掘机的铲斗、斗杆、动臂和转台回转通过各自的控制手柄与主分配阀连接,如图3-27所示。这种机械操纵方式的主要优点是简单可靠。机械操纵手柄移动位置如图3-28所示,从前开始供油到后开始供油的区段为手柄空行程,这段空行程要求越小越好,最大不应超过60mm,这个空行程的大小一般取决于销轴的间隙及杠杆的刚度。间隙小,刚度大,则行程小;反之则大。先开始供油至额定速度区段为加速段,一般在20~40mm之间。前终点到后终点为总移动量,一般要求不超过340mm。
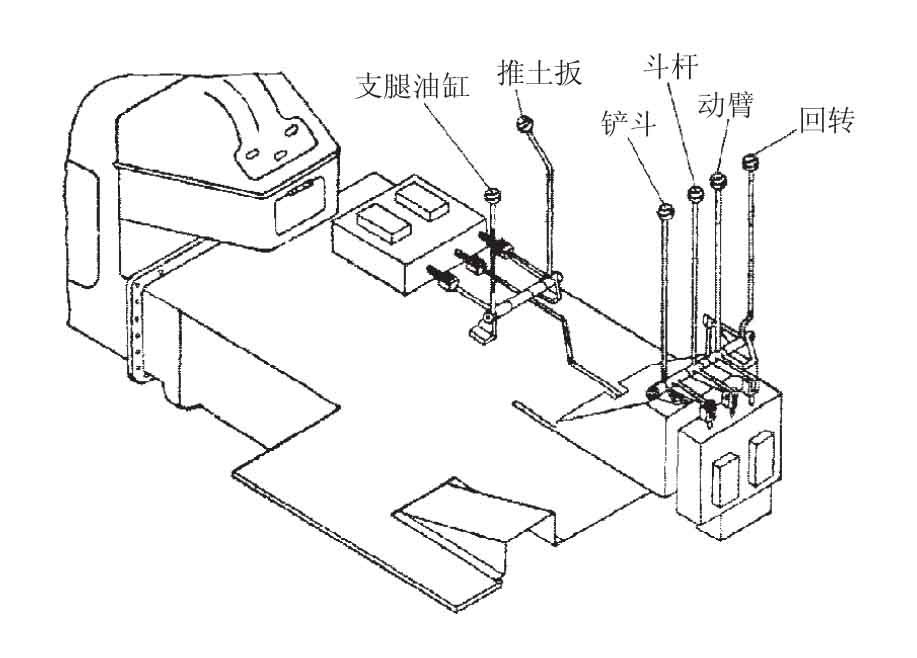
图3-27 机械操纵手柄位置

图3-28 手柄移动位置示意图
上述为四手柄操纵系统。为了减少司机换手时间和增加复合动作的机会,现在的挖掘机采用双手柄操纵系统,即四个作业动作用两个手柄操纵,如图3-29所示。
双手柄操纵的杠杆通过铰接点可向任意方向扳动,从而操纵4个主分配阀和进行复合动作。
B-504型挖掘机采用铰链式操纵系统,如图3-30所示,手柄能通过中间杠杆控制一个或两个作业动作使中间杠杆推动导向套管相对于护管移动,钢索与套管牢固连接。由于护管固定在操纵台上,并靠近分配阀,故当手柄倾斜时,钢索就推动阀杆。弹簧用来使手柄恢复中位。为便于调节阀杆的位置,还装有可调拉杆。这种操纵机构的优点是,手柄到分配阀可以任意安排位置,但设计和制造较复杂。

图3-29 双手柄操作的司机室
3.5.2.2 气压操纵
气压操纵机构如图3-31所示,斗杆操纵手柄和铲斗操纵手柄分别操纵斗杆铲斗的动作。扳动斗杆操纵手柄或铲斗操纵手柄,通过气阀分别推动汽缸操纵斗杆分配阀或铲斗分配阀。
气阀结构如图3-32所示,当阀在中间位置时,由A处进入的空气因被阀座所阻,不能进入孔B,故汽缸里面的空气由孔B经过柱塞的沟槽和密封螺母的孔C散于大气中。当手柄左右扳动时,柱塞头部被压下,阀座离开壳体,空气自孔A流往孔B,使汽缸动作。

图3-30 铰链式操纵机构示意

图3-31 气压式操纵机构
气压操纵可以大大减轻司机的操作强度,油路布置比较方便,但往往不能保证按比例操纵,并且须增加压气机、贮气罐等设备,使结构复杂。
3.5.2.3液压操纵
液压操纵依靠液压力推动主分配阀的阀杆。液压操纵的油路可以是独立油路,也可以从主油路系统中引出油路。目前在大型液压挖掘机和中、小型液压挖掘机上均采用液压操纵。常用的几种液压操纵机构介绍如下。
(1)机械反馈随动式液压操纵机构。
液压随动系统俗称液压放大器。在液压随动系统中,一方面执行机构(代表输出)能够自动地以一定的准确度重复着输入信号的变化规律,另一方面又起着功率或力的放大作用。输入信号大多数是一种“运动”(包括速度、位置、方向或作用力等),可以是平面的,也可以是空间的。
液压随动系统分为滑阀式和旋转式两种。
①滑阀式滚压随动系统。根据滑阀与执行元件(一般为油缸)的位置,分为外部形式和内部形式两种。
a.外部形式。外部形式的滑阀式液压随动系统原理如图3-33所示。当推动手柄通过杠杆将滑阀向左移动时,便使K2、K4的油口打开,K1、K3关闭,高压油即流向油缸的左腔,而右腔的油则经过K4的开口流回油箱。因K1、K3的关闭,可防止高压油泄漏。这样,活塞就与手柄运动的方向相反,而向右运动。活塞运动后,通过杠杆机构(传动比为L1/(L1+L2)),自动对滑阀进行反馈,力求滑阀相对阀套恢复到使系统处于静止位置。当手柄停止运动后,若外面没有载荷,滑阀即又返回到中位。

图3-32 气阀结构

图3-33 滑阀式(外部形式)液压随动系统原理图
由此可见,信号是通过一套杠杆机构从手柄传到滑阀。其杠杆机构称为输入信号,杠杆的传动比i=L1/(L1+L2)称为输入信号机构传动比。实际上i是信号输给滑阀前的机械放大系数,假如e代表输入信号的误差,则滑阀相对阀套的移动量为ie。
b.内部形式。如图3-34所示,内部形式的滑阀式液压随动系统把滑阀安装在执行元件(油缸)的里面。其工作原理是,当滑阀静止时,其凸肩盖住左、右油道,此时油不能进入油缸的左、右腔。当滑阀向左移动时,则两油道相通,左油道与油缸的右腔相通,压力油作用于活塞使其向左移动,这时滑阀停止移动,但活塞可续移动,直到两油道被滑阀的凸肩关闭为止;反之,活塞向右移动。
②旋转式液压随动系统。旋转式液压随动系统一般用于回转执行元件(液压马达),其工作原理如图3-35所示。当输入信号由输入轴传给转阀时,使转阀相对阀套转过一个角度。A—A剖面图中的a表示与回油路相通的低压腔,B—B剖面图中的b表示与泵相通的高压腔。当输入信号使转阀相对于阀套顺时针方向转动时,通向液压马达的油路与回油路相通,液压马达也按一定的方向(通常是顺时针方向)转动,直到转阀与阀套恢复到原来的位置,即达到几何中性零位为止,这就是反馈。如果轴不再输入信号,则系统处于静止位置。当输入信号的转速不超过泵的流量范围2,输入扭矩只需要克服阀体的转动摩擦力,而输出信号则是液压马达的扭矩。因此,这类系统也称力矩放大器。

图3-34 滑阀式(内部形式)液压随动系统原理图

图3-35 旋转式液压随动系统
(2)操纵阀与主分配阀一体式。
操纵阀与主分配阀一体,并在主分配阀中装有液压伺服助力装置,它由阀杆、定心弹簧、控制滑阀、伺服阀套、主滑阀和油管等组成,如图3-36所示。图中P为压力油进口,C为伺服油路通道,R通向油箱。
采用这种液压操纵机构可使司机的手柄操纵力降低到2.5kg以下,且手柄的行程只有115mm左右,缺点是不能随意布置管路。

图3-36 有液压伺服助力装置的主分配阀
(3)压力发生式先导阀操纵。
压力发生式先导阀操纵是一种远距离操纵阀,司机利用先导阀的压力来操纵主分配阀。其工作原理如图3-37所示,拉动先导阀阀杆,则B泵的油进入先导阀右侧产生压力,从而推动主分配阀向左移动。先导阀的出口压力可由阀杆的移动行程和节流口的节流面积控制。
先导阀的行程与主分配阀滑阀的行程维持近似的比例关系,从而得到较好的操纵性能。采用这种操纵装置,司机的操纵力可小于1kg。这种操纵装置,在大型挖掘机上用得较多,小型挖掘机也有所采用。
(4)减压阀式先导阀操纵。
这种操纵装置主分配阀滑阀的移动与前一种一样,也是用液压先导阀进行间接控制的,所不同的是采用了减压阀式先导阀。它的操纵油路如图3-38所示,扳动先导阀的手柄,则从操作油泵来的压力油首先进入先导阀,然后推动主分配阀的滑阀左右移动,使液压马达工作。操作油泵的压力为14~30kg/cm2,而手柄的操作力不大于3kg。

图3-37 压力发生式先导阀操纵

图3-38 操作油路
减压阀式先导阀的结构如图3-39所示,其手柄为万向铰式,每个手柄可操纵4个小先导阀,即每个小先导阀控制主分配阀的一个单向动作,因此,4个小先导阀可操纵两个主分配阀。扳动手柄,则推杆被压下,阀芯向下运动,P(压力源)与A(出口)连通;由于节流处产生压力,当该压力超过弹簧的调定压力时,阀芯向上移动,A与P被切断,而A与O(油箱)连通,这时节流口的压力随之降低,当该压力降低到小于弹簧压力时,阀芯向下移动,则A与P又连通,这样即可得到与手柄行程成比例的二次压力,从而使主分配阀滑阀的行程与先导阀手柄的行程维持比例关系,实现有感觉的操纵。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。










