



7.8 实训五交流伺服系统的构成、调整及使用
1.实训目的与要求
①熟悉交流伺服系统的构成以及伺服电动机、驱动器、数控系统的互联。
②掌握交流伺服电动机及驱动器的控制特性。
③了解交流伺服系统的动态特性及其参数调整方法。
2.实训仪器与设备
①MSMA022A1A型交流伺服电动机一台。
②MSDA023A1A型伺服驱动器一台。
③华中世纪星数控系统(HNC-21TF)一套。
④X-Y轴工作台一套。
⑤负载试验台一套。
⑥双通道储存示波器一台。
⑦音频信号发生器一台。
3.理论回顾
(1)永磁式同步交流伺服电动机的工作原理 永磁式同步交流伺服电动机的定子绕组有三相,由三相电流产生定子合成旋转磁场FS;在其由稀土永磁材料制成的转子中,三相电流产生转子磁场FR,FS与FR相互作用产生电磁转矩T(=
FsFRsinθSR),如图7-8-1所示。若保持θSR= 90°,则T=FSFR。
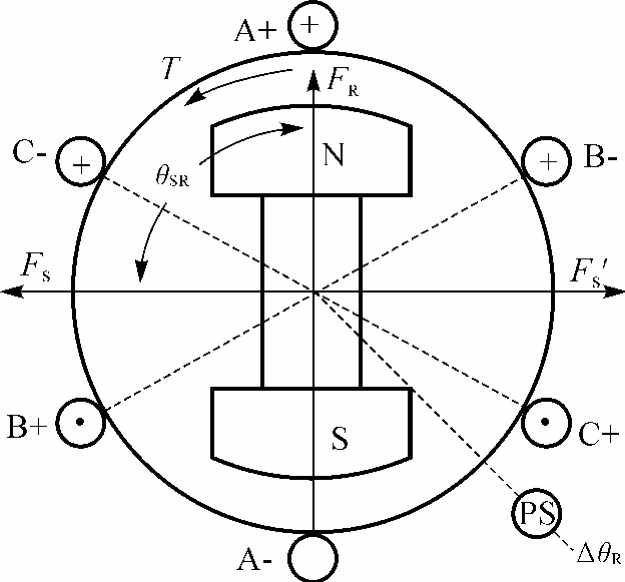
图7-8-1 永磁式同步交流伺服电动机结构原理图
在电磁转矩作用下,转子逆时针方向转动,由驱动控制器读取转子位置传感器PS给出的转子移动量△θR,控制定子绕组三相电流的相位,使其合成磁场FS沿转子旋转方向也移动相同的角度(△θR=△θS),保持θSR不变。电磁转矩的大小则通过控制三相电流iA,iB,iC的幅值Im来实现,即T≡Im(当Im=0时,T=0)。当需要转子反方向旋转时,只要将三相电流改变符号(及180°)即可;这将使其合成磁场FS也改变180°(即FS'),从而产生顺时针方向的转矩。上述这种控制方式称为矢量控制,这时永磁同步交流伺服电动机运行于自同步状态。
(2)交流伺服系统的组成 交流伺服系统主要由下列几个部分构成,如图7-8-2所示。
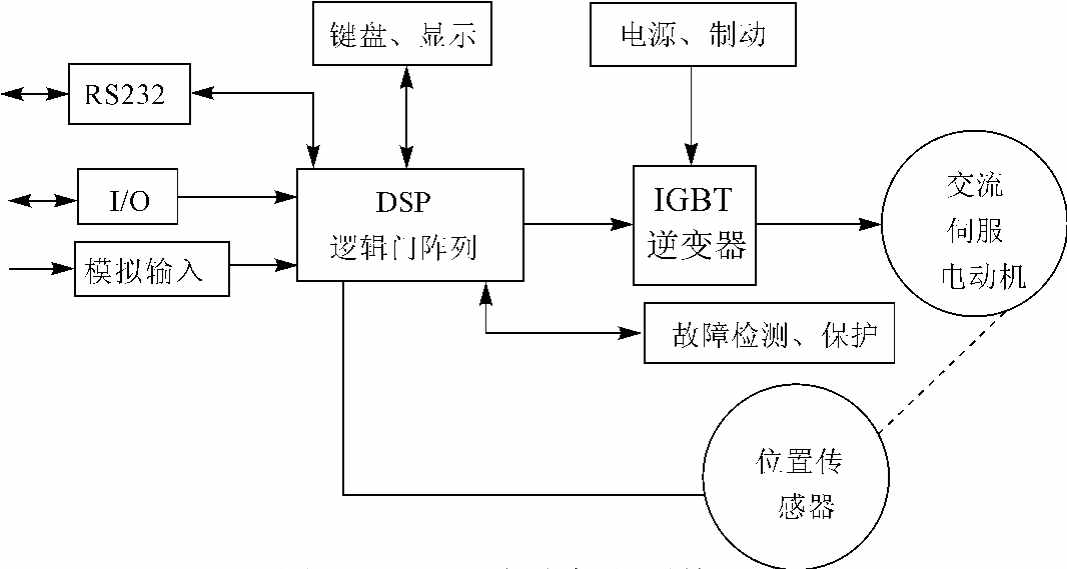
图7-8-2 交流伺服系统组成
①正如前述,交流伺服电动机,可分为永磁式同步交流伺服电动机,永磁式无刷直流伺服电动机、感应式伺服电动机及磁阻式交流伺服电动机。
②PWM功率逆变器,可分为功率晶体管逆变器、功率场效应管逆变器、IGBT逆变器(包括智能型IGBT逆变器模块)等。
③微处理器控制器及逻辑门阵列,可分为单片机、DSP(数字信号处理器)、DSP+CPU、多功能DSP(如TMS320F240)等。
④位置传感器(含速度),可分为旋转变压器、磁性编码器、光电编码器等。
⑤电源及能耗制动电路。
⑥键盘及显示电路。
⑦接口电路,包括模拟电压、数字I/O及RS232串口通讯电路。
⑧故障检测、保护电路。
(3)MINAS-A系列伺服驱动器控制信号接线图 图7-8-3为位置控制CN1/F接线图,图7-8-4为速度控制CN1/F接线图。

图7-8-3 CN1/F位置控制接线图

图7-8-4 CN1/F速度控制接线图
4.实训内容
(1)主回路接线 按图7-8-5连接(或检查)r,t及L1,L2,L3与电源的接线;连接(或检查)伺服驱动器U,V,W与伺服电动机A,B,C之间的接线;连接(或检查)伺服电动机位置传感器与伺服驱动器的连接电缆(见图7-8-5);连接(或检查)伺服ON控制线及开关。
(2)空载下试运行电动机
①松开伺服电动机与负载之间的联轴器,接通伺服驱动器的电源,按“Panasonic交流伺服电动机驱动器MINAS-A系列使用说明书”中PAGE-51的步骤,先设置用户参数为“出厂设定”,用JOG模式试运行电动机。接通驱动器电源后,初始显示“r-0”;按MODE∧键、及∨键,显示“AF_JOG”;按SET键后,再按住∧键直到出现“ready";按住<键直到出现“Srv_on”。按∧键,电动机逆时针方向旋转;按∨键,电动机顺时针方向旋转,其速率由PA57参数来确定。

图7-8-5 主回路接线图
②按照伺服驱动器的控制前面板所示的操作方法,将控制方式设置为“速度控制方式”(PA02=1),给定方式设置为“内部给定”(PA05=1),速度给定值设置为“100r/min”(PA53=100),然后将参数保存到EEPROM中。在确认没有报警或异常情况后,接通伺服使能(伺服ON)闭合,这时伺服电动机应在给定转速下运转。在当前监视器模式下,显示伺服电动机的实际转速。
③将伺服驱动器的控制前面板设置转换至参数设置模式,修改转速给定值(PA53);再按SET键生效后,伺服电动机应在新给定转速下运转。记录给定转速及实际转速,计算转速误差,填入表7-8-1。
表7-8-1 空载转速误差


图7-8-6 增量式编码器接线图
(3)测试交流伺服电动机的转速动态响应特性
①将伺服驱动器的速度监视输出接口SP及G(在控制系统前面板显示器下方)连接至数字存储示波器通道1,接通伺服驱动器电源,将给定转速设置为0r/min(PA53=0);然后接通伺服ON(这时伺服电动机不转动或处于低速漂移状态),修改给定转速,将其设置为1000r/min(PA53=1000),再按SET键使设置生效。这时,伺服电动机应从静止状态加速至给定转速,由数字存储示波器捕获这个加速过程,并显示、存储下来;再将给定转速设置为0r/min(PA53=0),按SET键使设置生效,这时伺服电动机应从运转状态制动至静止状态,同样由数字存储示波器记录这个制动过程。读取主要数据填入表7-8-2(上升时间,从0.1至0.9稳态值的时间;超调量=最大峰值-稳态值;稳定时间,从时刻0开始至峰值进入0.95~1.05稳态值范围内的时间)。
表7-8-2 交流伺服电动机转速动态响应特性
②修改速度环增益(PA11)、速度环积分时间常数(PA12),以及改变转子上的转动惯量后,重复上述启动、制动过程,观察速度响应特性的变化;取定某一转动惯量(如10倍转子惯量),通过改变PA11及PA12,使响应特性的超调变小、响应加快。上述有关MINAS交流伺服驱动器常规自动增益调节、实时自动增益调节参照参考文献,现设定参数PA21=2,PA22=6。
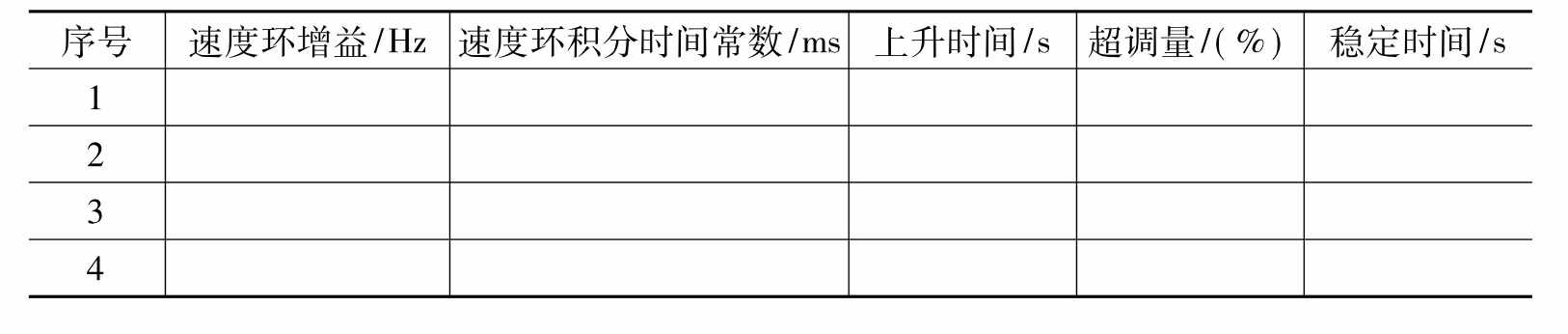
③记录并比较增益调整前后速度响应特性的差别,列出最佳的速度环增益及速度环积分时间常数。记录数据,填入表7-8-3中。
表7-8-3 最佳的速度环增益和速度环积分时间常数

(4)测试交流伺服电动机的频带宽度
①接通伺服驱动器电源,将给定方式设置为“外部给定”(PA05=0),将速度指令输入增益设置为“300rpm/V”(PA50=300);然后将参数保存至EEPROM中,并断开驱动器电源。
②将正弦波频率发生器的输出电压幅值调至0.1V(频率范围为0~500Hz),预先将频率调至1Hz;将正弦波发生器的输出电压连接至伺服驱动器的速度指令输入端口(CN1~14),接地端连接至(CN1~15),同时也将该输出电压接至示波器的通道1;将伺服驱动器的速度监视输出端口SP及G(在控制系统前面板显示器下方)连接至示波器的通道2。
③接通伺服驱动器电源,确认没有报警或异常情况后,接通伺服ON,这时伺服应以1Hz的频率正(反)转(我们可从示波器上观察给定的速度和伺服电动机的实际速度之间的差别:两者在相位上接近同相,转速的幅值因计算系数不等而不同)。逐渐升高正弦波发生器的输出频率,并保持其幅值为0.1V,记录电动机转速的幅值及其与给定转速信号的相位差,直至相位差达到π/2;记录此时的频率,作为速度环的频带宽度。记录相关数据,填入表7-8-4中。
表7-8-4 交流伺服电动机频带宽度

(5)测试交流伺服电动机的稳速误差
①接通伺服驱动器电源,将给定方式设置为“内部给定”(PA05=1),将给定转速设置为“3000r/min”(额定转速),即PA53=3000,然后保存参数到EEPROM中,断开伺服驱动器电源。
②将伺服电动机与负载联轴器连接起来,接通伺服驱动器电源后,再接通伺服ON,打开监视器模式;选择转矩项(dp_Lrp),按SET键,显示伺服电动机输出转矩百分数;逐渐增加电动机的负载转矩值(L=100.0)额定转矩(L=100,即100%),再转换至显示速度项,读取伺服电动机的实际转速。调整主电源的输入电压至110%(即220V),保持负载转矩不变,记录伺服电动机的实际转速;再将主电源输入电压调至85%(即170V),保持负载转矩不变,记录伺服电动机的实际转速。
③计算电压变化时伺服电动机的稳速误差△n
△n=[(实际转速-额定转速)/额定转速]×100%
将相关数据填入表7-8-5中。
表7-8-5 交流伺服电动机的稳速误差

(6)测试位置闭环下伺服电动机的稳态刚度
①接通伺服驱动器电源,将控制方式设置为“位置控制方式”(PA02=0),然后保存参数到EEPROM,断开伺服驱动器电源。
②连接伺服电动机输出轴与负载联轴器。接通伺服驱动器电源后,再接通伺服ON,这时伺服电动机静止不动,处于定位状态。
③将转矩监视器信号输出端IM及G(控制系统前面板显示器下方)接至示波器或万用表电压挡,打开监视器模式,选择位置偏差项(dp_Eps);按SET键,显示出位置偏差值(以脉冲数表示)。用手在联轴器上施加扭矩,使扭矩达到额定转矩,即IM输出到3V记录该时刻的位置偏差值△ps1;断开伺服ON和伺服驱动器电源,将伺服电动机输出轴转动约120°后,接通伺服驱动器电源和伺服ON,对转子轴施加额定转矩,记录其位置差值△ps2;断开伺服ON和伺服驱动器电源,转子轴再转过约120°,重复上述步骤,记录下位置偏差值。静态刚度按下式计算:
静态刚度=额定转矩(N·m)/最大位置偏差值(弧度)
将相关数据填入表7-8-6中。
表7-8-6 交流伺服电动机的稳态刚度

5.实验总结
①描述永磁式同步交流伺服系统控制的原理。
②说明永磁式同步交流伺服系统控制框图。
③区分永磁式同步交流伺服系统的强、弱电连接。
④说明MINAS A系列交流伺服电动机驱动器投入运转的操作步骤。
⑤说明如何调整速度环参数以优化系统响应。
6.实验报告
①绘制永磁式同步交流伺服系统电气连接图。
②根据实验数据,计算伺服系统的稳态精度。
③根据速度控制方式下的最低转速和额定转速,计算伺服系统调速比。
④根据速度阶跃超调小、稳定时间短的原则,从实验数据中选择一组速度环增益和速度环积分时间常数。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。









