



1.系统的特征
作为一个系统,除前面提及的系统的整体性、系统由相互作用和相互依存的要素所组成、系统受环境影响和干扰并和环境相互发生作用这三项最普遍的、最本质的东西外,我们一般认为,系统应具备以下六大属性。
(1)系统的目的性
任何系统都是有目的和目标的。系统各组成部分按照统一的目的组织起来的性质叫系统的目的性。例如销售系统,其目的是为了增加商品销售量、增加销售的营业额,是通过销售系统的具体功能发挥得以达到和实现的,因此任何系统都是具备某种特定指向的功能。任何系统,尤其是人造系统都具有特定的功能,其组成都具有一定的目的并且有达成目的的手段。作为系统的一个组成部分都有为系统目的服务的一面,同时作为不同于其他组成部分又有维护自身利益的一面,因此研究确定系统目的和子系统目的之间的关系,保证各子系统在系统总目的的指导下,协同配合、分工合作,在完成各子系统目的的同时达成系统的目的是研究系统目的性的主要内容。
一般来说,系统的目标通常不是单一的,而是多方面的,在这其中又往往在特定的时间段或特定的条件下,存在一个主要目标,且这个目标受到相关约束的制约。如以一个企业的总体发展规划为例总存在一个长期的战略目的,但在企业的不同发展阶段,作为实现长期战略目的的细化战略——企业的近期战略目的就有可能大不一样。因此,系统的目的一般用更具体的目标来表达,即系统具有总目标,总目标又细分为若干个分目标。系统的目的性可通过总目标来表达:
G=(1.1)
式中,G:系统的总目标;
gi:系统的任意一个分目标;
i:系统的分目标数。
值得注意的是,系统分目标集必须保证系统总目标的实现,但是分目标之间可能是矛盾的,如物流系统中时时强调的必须正确协调和处理好的物流服务与物流成本之间的效益背反(trade-off),因此往往采用某种形式的折中是完全必要的,即在矛盾的分目标之间寻求分目标之间的均衡,达到系统的最优。
(2)系统的集合性
所谓的集合性,是指系统都是由两个或两个以上可识别的部分(或子系统)所构成的多层次整体。元素可以是实体的,如人、车辆、货物等,也可以是非实体的(概念的),如班组计划、调度计划、需求计划等。系统的集合性的数学表达式如下:
X=(1.2)
式中,X:元素的集合,表征某个系统;
xi:集合中的某一个元素;
i:集合中的元素数。
需要说明的是,在同一个系统中,两个完全同质的元素,我们往往将其视为一个,即在上述表达式中隐含这样一个信息,即xi≠xj。另外,子系统是系统不可缺少的一部分。
(3)系统的相关性
系统各组成部分(子系统)之间按照一定的方式相互联系、相互依赖、相互制约、相互作用的性质叫系统的关联性。通过系统的关联性可揭示出系统整体特性和整体与部分的关系。例如在国民经济系统中,工业系统为农业系统提供机械设备、化肥等,而农业系统为工业系统提供原料、粮食和市场等。系统各个元素的相互关联、相互支持和相互制约,使之有机结合成为有特定功能的社会系统。
系统的相关性是用来说明组成元素之间相互联系、相互依赖、相互制约、相互作用的关系的。对系统而言,仅有组成元素而元素之间不存在相互关系,还不能构成系统,从这个角度上讲,系统的相关性是系统元素之间全部关系的总和。二元关系是多元关系的基础,我们以此为例来研究系统的相关性。
设xi∈XIkengdie#8834;X,而xj∈XJkengdie#8834;X,则相关关系R可表示为:
xiRxjxjRxi或xi=R(xj)xj=R(xi)(1.3)
具有这种关系的(xi,xj)顺序对应系统相关性的认识对象,这意味着要研究和确定xi和xj的对应关系,这种对应称作映象。如果对应任一xi总有一个xj存在,反之有一个xj也有确定的xi存在,这时xj是xi的映象,xi是xj的原象。XI是原象集,XJ是映象集,这种R关系就是XI和XJ的顺序对象关系。则利用系统的相关性,系统的定义可表示为:
S=(1.4)
从上面的二元关系的数学表达式,即可联想初等数学中的函数概念,而实际上函数即为系统的一个特例。
(4)系统的层次性
系统作为一个相互作用的元素的总体,有着一定的层次结构,并分解为一系列的子系统。这种分解的基本标志是目标,不同的功能目标要求会产生不同的子系统。作为一个例子,我们可以以交通系统为例,对宏观的交通系统我们可按运输工具分为民航系统、公路系统、铁路系统、水运系统和管道系统,按出行模式我们则将交通系统分为公共交通系统、私家车交通系统等,按运输对象我们可将其分为货运交通系统和客运交通系统等。不论如何分解,系统的各级子系统和系统元素可以用一个金字塔形势的结构来表示,如图1-3所示,我们称之为系统的结构图。

图1-3 系统结构图示意图
图1-3的系统结构示意图反映了系统的层次关系。处于金字塔尖的方块(顶点)代表系统的支配元素。一般来讲,系统结构图中的顶点数是有限的,顶点间的连线表示元素间的各种关系。在系统论中主要有三种关系(图中用三种不同的线条表示):隶属关系(粗实线)、反馈关系(细实线)、并联关系(虚线)。
总的来讲,但凡系统都有结构,且结构都是有序的。系统的有序性主要通过系统的层次关系来体现。由于系统的各组成部分在系统中所处的地位不同,而形成了不同的层次,该层次关系(即三种关系)决定了系统内物质、能量和信息的流动,从而使系统能够作为一个整体发挥较高的功能和效率。
(5)系统的整体性
系统作为由若干相互作用和相互联系的部分有机组合的、有一定结构和功能的整体,其本质特征是有机的整体性。换句话说,组成系统的各个要素不是简单地集合在一起的,而是有机地组成一个整体,每个元素要服从整体,追求整体最优,而不是每个元素最优。这就是通常所说的全局观点。有了系统的整体性,即使在系统中每个元素并不十分完善,通过综合、协调,仍然使整体系统达到较完美的程度。反之,如果不考虑整体利益,单纯地追求每个元素达到最好的结果,从全局看系统还可能是最差的系统。
系统整体性首先是系统目标的整体性;其次是系统功能的整体性,即组成系统的各部分的功能必须服从系统整体的功能,系统功能不等于各组成部分功能的简单相加,确定对系统的评价准则时,必须以系统整体为基础;最后是系统规律的整体性,系统整体的规律不是各组成部分规律的叠加。总之,一切系统都是整体,是组成部分与环境相互作用的整体,是各组成部分之间相互联系、相互作用、相互依赖、相互制约所形成的整体。
系统的整体性主要是从协调角度来说明系统的,即系统的整体性应保证在给定的目标下,使系统元素集、元素的关系集以及其层次结构的整体组合效果最大化:
E*= P(X,R,C)(1.5)
式中,E*:对应于目标集的条件下所获得的系统最大组合效果;
P(X,R,C):整体组合效果函数;
C:系统层次结构。
(6)系统对环境的适应性
任何系统都处于一定的环境之中,系统总要受到环境的影响和制约。系统也要对环境的变化作出某种反应。我们把环境对系统的影响称为刺激或冲击,而系统对环境的反应称为反响。系统对环境的适应性表现为环境对系统提出的限制和系统对环境的反馈控制作用。
任何一个系统总处于特定的物质环境(更大的系统)之中,并与外部环境不断地进行物质、能量、信息的交换,没有这种正常的交换,系统便不能生存。这种系统随着外部环境的变化以获得生存和发展的能力的这种性质,即是系统的环境适应性。
环境的约束集可以表示为:
O=(1.6)
式中,O:环境约束集;
r:环境约束个数。
显然系统整体最优组合效果受环境约束集约束,则(1.5)式在环境约束下应为:
E**= P(X,R,C)(1.7)
以及
Sopt=max(1.8)
式中,E**:对应系统目标集和环境约束集下的系统最优组合效果;
Sopt:具有最优组合效果及最优输出的系统。
2.系统的分类
系统的分类方法很多,按照不同分类方法可以得到各种类型的系统。如可按系统的输出结果分为确定型和随机型系统;根据系统的变化与时间的关系分为连续型和随机型系统;根据转换的复杂程度分为简单系统和复杂系统。其中最重要的一种分类方法是根据系统的变化与时间的关系分的连续型和离散型两种系统。
(1)确定型系统和随机型系统
对系统的这种划分的主要依据是系统的输出结果。
确定型系统是指系统在某一时刻的状态完全由系统的以前状态所决定,因而其输出结果完全由输入而确定。
随机型系统是指相同的输入经过系统转换后得到不同的输出结果,这些结果虽不确定,但服从一定的概率分布。
图1-4为两类系统的简单示意图。

图1-4 确定型系统和随机型系统
图a为确定型系统。处理A使状态S0确定地变化为Sm。
图b为随机型系统。处理A使状态S0分别以概率P1,P2,P3变换到状态Sm1,Sm2,Sm3的结果是随机的。如一名工人加工某零件所需的时间就是一个随机型系统,其输出虽然不能完全确定,但遵循一定的统计分布规律。大多数系统都属于随机型系统。
(2)连续型系统和离散型系统
根据系统状态的变化与仿真时间的关系,可以将系统划分为连续型系统、离散型系统、连续—离散复合型系统。连续型系统是指系统状态随仿真时间呈连续型的变化;离散型系统是指系统状态随仿真时间呈间断性的变化,即系统状态仅在有限的时间点发生跳跃性的变化;连续—离散复合型系统中变量可以作连续性及离散性变化,或在连续性变化中作离散性突变,仿真时间可以是连续的,也可以是离散的。
连续型系统和离散型系统间没有绝对的界限,如一个生产系统,单件小批量生产可以作离散型系统处理,大量生产时,可以作连续型系统处理,一个系统属于哪类系统往往并非由系统本身所决定,而是由研究目的所决定。
1)连续型系统
在连续型系统中变量随着时间呈连续性变化,仿真时间既可以是连续的,也可以是离散的,图1-5、图1-6分别表示具有连续仿真时间及离散仿真时间的连续型仿真变量与仿真时间的关系。

图1-5 连续型系统(具有连续仿真时间)

图1-6 连续型系统(具有离散仿真时间)
2)离散型系统
仿真时间可以是离散的,也可以是连续的,但发生变量是离散的,且与事件时间有关的具体仿真时间是离散的。 图1-7表示离散系统仿真变量与仿真时间的关系。

图1-7 离散型系统
3)连续—离散复合型系统
在复合型仿真中,变量可以作连续性及离散性变化,或在连续性变化中作离散性突变,仿真时间可以是连续的,也可以是离散的。图1-8表示一个复合型实例——存贮控制系统的仿真。
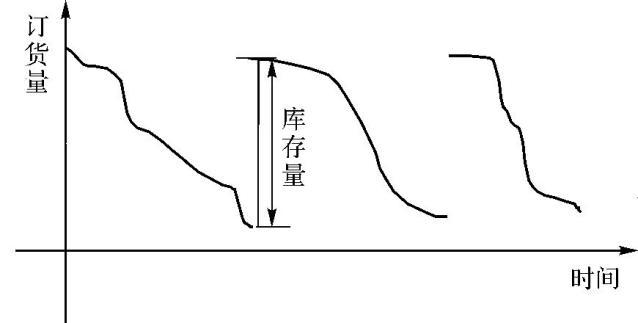
图1-8 连续—离散复合型系统
应当说明,离散型仿真并非常常用来构造离散型系统;同样,连续型仿真也并非常常用来构造连续型系统。对于一个具体的系统,决定用离散型仿真还是连续型仿真,取决于特定的研究目的。譬如,高速公路上交通流模型,假如单个车辆的特性和运动是重要的话,交通流的模型应该是离散的;如果公路上的汽车作为一个“集合体”对待,交通流就可以通过连续型模型来描述。
(3)简单系统和复杂系统
系统的这种划分取决于转换的复杂程度。图1-9表示了一个简单系统——单阶段综合计划决策系统。图1-10则表示一个复杂系统——多阶段综合计划决策系统。
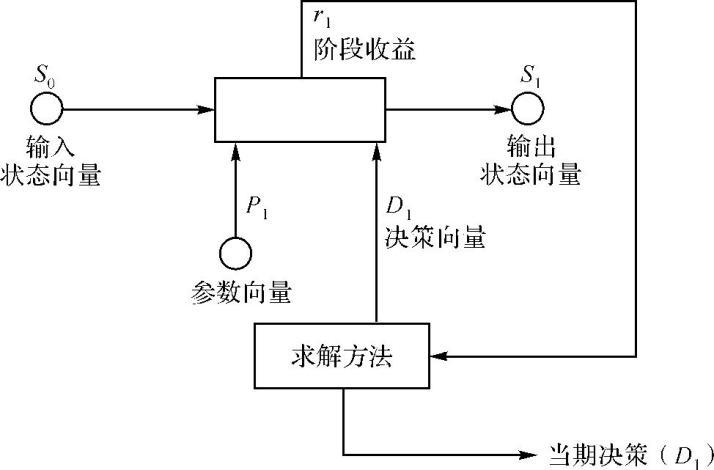
图1-9 单阶段综合计划决策系统
图中,P1,P2,…,Pn:第1,2,…,n期参数向量。
D1,D2,…,Dn:第1,2,…,n期决策。
r1,r2,…,rn:第1,2,…,n期阶段收益向量。
R:总收益,其值为:
R=ri(1.9)
S0为系统输入状态向量,在一定的参数向量P1的条件下,采取决策向量D1,获得输出向量S1,且S1=t1(S0,P1,D1)为单值转换,r1为阶段收益向量,且r1=f1(S0,P1,D1)。r1可以为产品产量、利润、成本等,P1则包含工人数量、生产数量、库存数量等。
在多阶段综合计划决策系统中,
S1,S2,…,Sn:第1,2,…,n期状态。
对于某特定阶段i(i=1,2,…,n),Si-1为其输入状态向量,经过该阶段转换,系统状态变为Si,Si=ti(Si-1,Pi,Di)。阶段收益为ri,ri=fi(Si-1,Pi,Di)。

图1-10 多阶段综合计划决策系统
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。











