



4.3.6 单自由度系统的振动
物体在其平衡位置附近所作的周期性的往复运动称为振动。这里仅研究单自由度系统在恢复力(或恢复力矩)、线性阻尼和谐扰力作用下的线性振动,主要包括自由振动、衰减振动和强迫振动。
1.自由振动
仅受恢复力(或恢复力矩)作用而产生的振动称为自由振动。
(1)振动方程振动特性
图4.3-14为一悬挂质量弹簧系统,物体(视为质点)重W=mg,弹簧原长为l0,其刚性系数为k,静变形为δst。现取系统静平衡位置为坐标原点O,建立坐标轴x,则以x为独立参数的振体自由振动的运动微分方程、振动方程、特性参数等列于表4.3-9中。
自由振动特性小结如下。
①由振动方程x=Asin(pt+α)可见,系统在恢复力作用下的自由振动是简谐振动,振动中心在平衡位置。对于图4.3-14所示系统,其圆频率
![]()
②振幅A和初位相α由运动的初始条件(xO、vO)来决定。
③振动周期T、固有频率f(或频率)、固有圆频率p(或圆频率)只决定于系统的惯性和弹性,而与运动的初始条件无关。
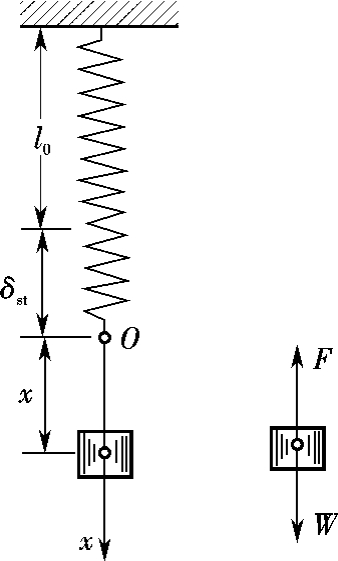
图4.3-14
表4.3-9

(2)振动系统固有圆频率的计算
①直接法:质量—弹簧系统,设已知质量m和弹簧刚性系数k,直接代入公式p 即可求得。
即可求得。
②平衡法:质量—弹簧系统,在平衡时kδst=W=mg,即k= ,故
,故
![]()
③列出系统的运动微分方程,化为标准形式,如
![]()
即可得到
![]()
式中:meq为等效质量,表示系统的惯性;keq为等效刚性系数,表示系统的弹性;q为系统的广义
坐标。
④能量法:一单自由度振动系统,当不计阻尼时,该系统在振动过程中机械能保持不变。如取平衡位置为零势能点,则系统在平衡位置的最大动能值Tmax将等于系统在极端位置时的最大势能值Vmax,即
T+V=C或Tmax=Vmax
应用上式,即可求得系统的固有圆频率p。
(3)并联或串联弹簧的当量刚性系数(等效刚度)
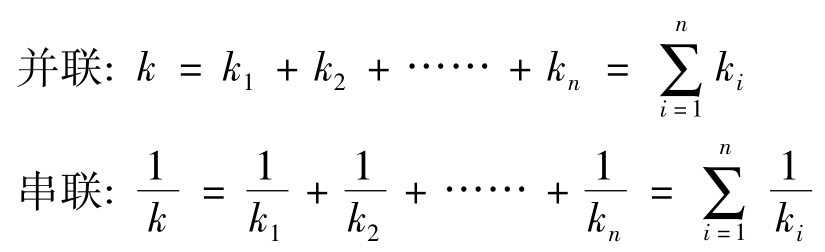
由以上两式可知,并联后的当量刚性系数加大了,串联后的当量刚性系数是降低了。

图4.3-15
2.衰减振动
除受恢复力(或恢复力矩)外,尚受到阻尼作用而产生的振动称为衰减振动,也称为有阻尼的自由振动。这里,仅限于受线性阻尼R=-βv的情况,式中β称为阻力系数。
图4.3-15所示的振动系统,在任一瞬时物体受有重力W、弹性力F和线性阻尼力R=-βv。现取静平衡位置O为坐标原点,建立坐标轴x如图4.3-15所示,则可得有阻尼自由振动的运动微分方程为
![]()
式中2n= ,n称为阻尼系数。
,n称为阻尼系数。
现分n<p、n>p和n=p三种情况来讨论衰减振动。
(1)n<p,即小阻尼情况
当n<p时,衰减振动的运动微分方程、振动方程和特性参数等列于表4.3-9中。
衰减振动特性小结如下。
①阻尼对周期的影响。
衰减振动的周期
其中T= 为无阻尼自由振动的周期,γ=
为无阻尼自由振动的周期,γ= 称为阻尼比。由此可见T1>T。但是在小阻尼情况下,阻尼对周期的影响很小,可近似地认为
称为阻尼比。由此可见T1>T。但是在小阻尼情况下,阻尼对周期的影响很小,可近似地认为
![]()
②阻尼对振幅的影响。
由振动方程x=Ae-ntsin( -n2t+α),画出振动的运动图线(图4.3-16)。
-n2t+α),画出振动的运动图线(图4.3-16)。
图示表明,系统在其平衡位置附近作往复运动,但振幅随时间的增加而迅速减小。其衰减快慢可用减幅系数η来表示,即

图4.3-16
![]()
式中:Ai为瞬时ti的振幅,Ai+1为ti+1=ti+T1瞬时的振幅。可见,衰减振动的振幅是按几何级数迅速衰减的。

图4.3-17
(2)n>p与n=p(即大阻尼与临界阻尼)情况
由这两种情况的运动图线(图4.3-17)可知,运动已无振动的特性了,且随着时间的增大,系统逐渐趋近于平衡位置。
3.强迫振动
由干扰力引起的振动,称为强迫振动。若干扰力随时间而简谐变化,则称为谐扰力,其可表为S= Hsinωt。
现以系统的平衡位置为坐标原点,以坐标x为独立参数,将受谐扰力作用下的强迫振动的主要内容列于表4.3-10。
其中h=
 ,B0表示系统在干扰力的最大幅值H静止作用下所产生的偏移;z称为频率比;n称为阻尼系数,γ=
,B0表示系统在干扰力的最大幅值H静止作用下所产生的偏移;z称为频率比;n称为阻尼系数,γ=
 称为阻尼比,λn=称为放大系数。
称为阻尼比,λn=称为放大系数。
表4.3-10

续表

强迫振动特性小结如下。
①在恢复力、干扰力和阻尼力作用下,系统的振动由衰减振动和强迫振动两部分组成。实际上,由于阻尼的影响,衰减振动将迅速消失,而强迫振动始终存在。
②强迫振动是等幅的简谐振动,与运动的初始条件无关,其振动圆频率与干扰力的圆频率相等,而与系统的固有圆频率p无关。
③振幅频率特性曲线。现以频率比z为横轴,振幅放大系数λn为纵轴,画出在不同阻尼情况下的振幅频率特性曲线(图4.3-18)。这曲线表示在B0不变的情况下,振幅随着γ与z而变化的关系。

图4.3-18
a当z=0(即ω=0)时,λn=1,即B=B0。
b当z<<1(即ω<<p)时,λn≈1,即B≈=B0。
当z>>1(即ω>>p)时,λn≈0,即B≈=0。
c当z=1(即ω=p)时,若系统的γ=0(即无阻尼情况),则振幅B无限增大,这种现象称为共振。一般将0.75<z<1.25的区域称为共振区,并称ω=p为系统的共振频率。若谐扰力是机器的转子引起的,通常将共振时转子的转速称为临界转速。
事实上,当系统发生共振时,由于阻尼的存在,振幅不会无限地增大,而仍是有限值,且共振时的振幅并不是最大振幅。另外,图示还表明,放大系数λn随阻尼增大而减小,当γ>0.707时,放大系数的最大值就不存在,共振现象也就完全消失。
d由上分析可知,在远离共振区域(即z<<1或z>>1),阻尼对振幅的影响十分微小,可忽略不计。也就是说,当ω远离p时,在计算有阻尼强迫振动的振幅时,可以不计阻尼的影响。
【例4.3-12】图4.3-19所示的悬臂梁,在自由端上挂一弹簧,弹簧上悬挂一重P的物体。设在力P作用下弹簧的静伸长为δst,梁的自由端的静挠度为fst。如给重物一初速度v0,试求重物的自由振动方程。梁和弹簧的质量均忽略不计。
解:悬臂梁对物体的作用相当于一弹簧,根据悬臂梁端点的静挠度fst可算出此梁在端点沿铅垂方向的刚性系数为
![]()

图4.3-19
类似地,可算出悬挂弹簧的刚性系数为
![]()
于是,图4.3-19(a)所示振动系统可以抽象为图4.3-19(b)所示的串联弹簧系统。又因串联弹簧可用一等效弹簧来替代,其当量刚性系数为
![]()
最终该系统可简化为图4.3-19(c)所示的质量弹簧系统。现以此力学模型进行求解。
(1)对象:取重物为研究对象。
(2)运动分析:重物由于初始干扰,沿铅垂方向作自由振动。为了简便,选取重物的静平衡位置O为坐标原点,x轴向下为正。t=0时x0=0,‥x0=v0。
(3)受力分析。通常,将重物放在x轴正向的任一位置上进行受力分析。作用其上的力有重力P和弹性力F,力F在x轴上的投影为
F=-k(fst+δst+x)
(4)列运动微分方程,并求解振动规律由F=ma得
![]()
因重物处于静平衡位置时,重力P与静变形引起的弹性力F0平衡,即有P-k(fst+δst)= 0,故上式可简化为

由表4.3-9所示的公式,可知式(3)的通解为
x=Asin(pt+α)
根据初始条件x0=0 =v0,可分别求得振幅A及初位相α为
=v0,可分别求得振幅A及初位相α为
此重物的自由振动方程可表示为
![]()
【例4.3-13】图4.3-20(a)为一种振动仪的简图。已知振子M重Q;曲杠杆AOB重P,对O的转动惯量为J;弹簧1及2的刚性系数分别为k1及k2。试求系统的固有频率f。弹簧的质量不计。

图4.3-20
解:以整个系统为分析对象,作受力图如图4.3-20(b)。设系统平衡时OA处于水平位置,取在任一瞬时t,OA与水平线的夹角为φ,因为是微振,各力作用线到O点的距离的改变是高阶微量,可以不计。而F1=k1(aφ-δst1),F2=k2(bφ-δst2),其中δst1及δst2是两弹簧的静压缩。
根据受力情况及运动情况分析,本题用动量矩定理建立运动微分方程较为方便。系统对O的动量矩为
![]()
而MO=-Qa-pd-k1(aφ-δst1)a-k2(bφ-δst2)b,
平衡时由∑mO(Fi)=0有
Qa+pd-(k1δst1)a-(k2δst2)b=0
因而MO=-(k1a2+k2b2)φ
根据动量矩定理
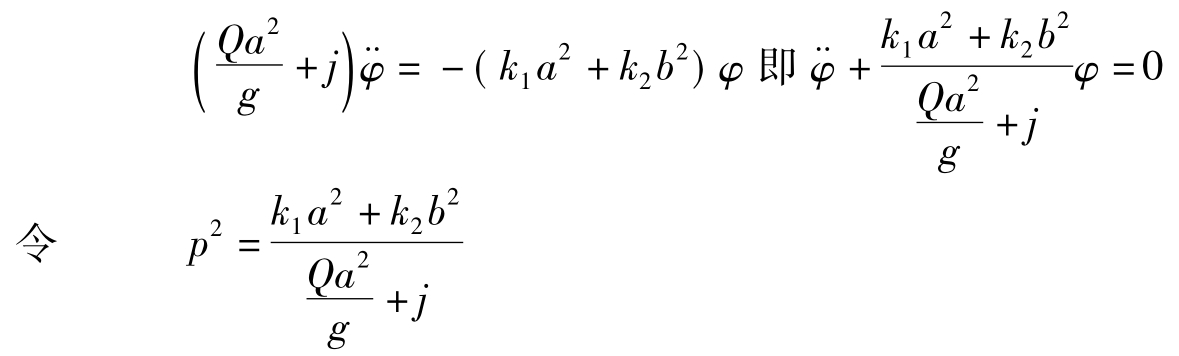
就得到标准形式的运动微分方程
![]()
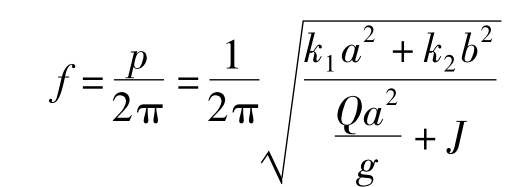
而系统的固有频率为
【例4.3-14】写出图4.3-21所示系统的微振动微分方程,求其固有圆频率。假设轮子无侧向摆动,且轮子与绳子之间无滑动;不计绳子与弹簧的质量;轮子是均质的,半径为R,质量为M;物块质量为m;弹簧的刚性系数为k。
解:以x为坐标(取静平衡位置O为原点)。因弹性力及重力都是有势力,而绳子的约束力不做功,本题用机械能守恒定理建立运动微分方程较为简便。在这里,轮缘上I点速度是零。故
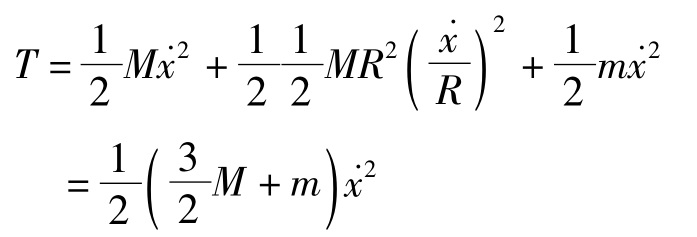
以平衡位置为计算势能的零位置。并注意到轮心位移x时,弹簧伸长2x,故
![]()
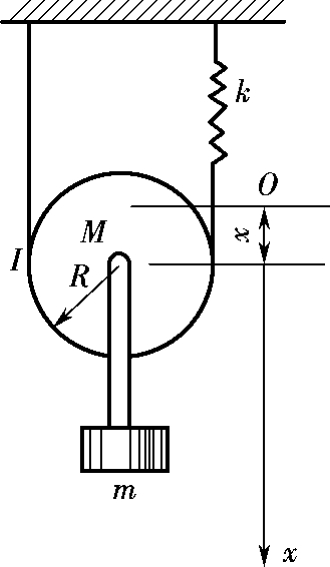
图4.3-21
其中δst是平衡时弹簧的静伸长。因系统平衡时,由ΣmI=0得2kδst=(M+m)g,于是
V=2kx2
由机械能守恒定理T+V=const,有
![]()
上式两边对t求导,再消去公因子6x,得
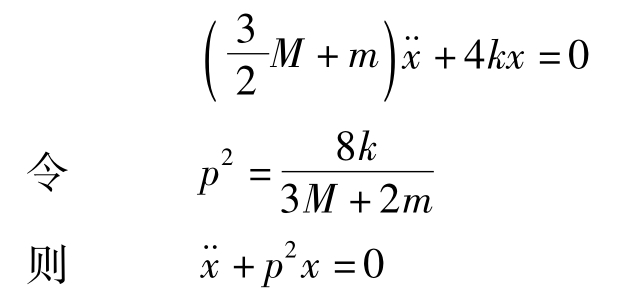
这就是系统的运动微分方程。而系统的固有圆频率是p= 3M+2m)。
3M+2m)。
【例4.3-15】一重量为W的物体挂在弹簧上(图4.3-22(a)),弹簧的刚性系数为k。设弹簧的端点A作上下振动,其振动方程xe=asinωt。求物体的强迫振动方程。
解:取物体的平衡位置O为x轴的原点,x轴向下为正。在任一瞬时,作用在物体上的力有重力W和弹性力F(图4.3-22(b))。由于弹簧端点A的位移的影响,这时弹性力为
F=-k(δst+x-xe)
因此物体的运动微分方程为

图4.3-20
![]()
由于W=kδst,故上式可化为
![]()
上式表明,干扰力是由于弹簧端点的运动xe而引起的,干扰力的力幅与弹簧的刚性系数k及端点的振幅a成正比。
![]()
则式(1)可简化为
![]()
可见物体作无阻尼强迫振动。由表4.3-10知强迫振动的振幅
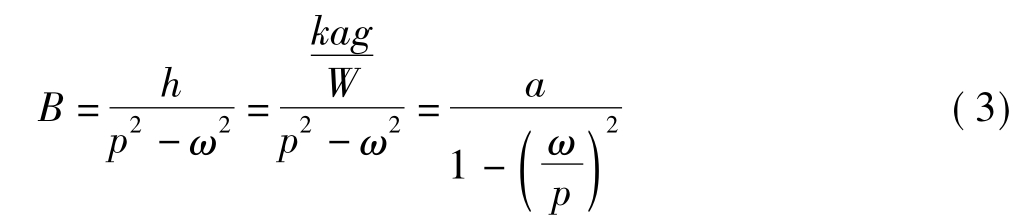
于是得物体的强迫振动方程为
![]()
由上式可得放大系数
![]()
显然,当ω>>p时,z>>1,振幅B→0,这时尽管弹簧端点A激烈振动,但物体几乎处于静止。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。











