



2.2.2 四面体单元
1)矩阵[B]
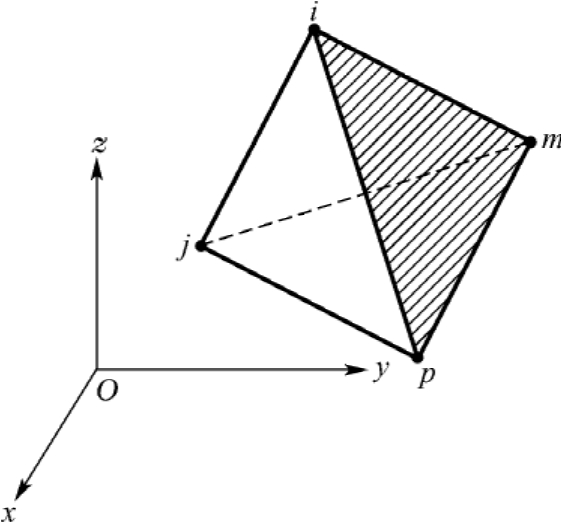
图2.9 常应变四面体单元
如图2.9所示的一个四面体单元,以4个角点i、j、m、p为结点。这是最早提出的、也是最简单的空间单元。
每个结点有3个位移分量:
每个单元共有12个结点位移分量,可表示为一个向量:
{δ}e=[δiδjδmδp]T

以i、j、m、p结点的坐标代入上式,可求得12个系数β1~β12,再回代入上式,可得

其中

式中 V——四面体ijmp的体积。
为了使四面体的体积V不致成负值,单元结点的标号i、j、m、p必须按照一定的顺序。在右手坐标系中,当按照i→j→m的方向转动时,右手螺旋应向p的方向前进,如图2.9所示。
在空间问题中,每个结点具有6个应变分量。由弹性力学可知,应变矩阵可定义如下:

将式(2-60)代入上式,得到
{ε}=[B]{δ}e=[Bi-BjBm-Bp]{δ}e (2-65)
子矩阵[Bi]是如下的6×3矩阵:

由于矩阵[B]中的元素都是常量,单元应变分量也都是常量。
由式(2-59)和式(2-64)可知,式(2-59)中系数β1、β5、β9代表刚体移动,β2、β7、β12代表常量正应变;其余6个系数反映了常量剪应变和刚体转动。因此,式(2-59)中12个系数充分反映了单元的刚性位移和常量应变。
2)弹性矩阵[D]
对于各向同性体,弹性矩阵[D]决定于下式:

3)四面体单元的单元刚度矩阵
将矩阵[B]的表达式(2-66)代入式(2-45),可求出单元刚度矩阵[k]。由于矩阵[B]的元素是常量,计算是简便的。计算公式如下:
[k]=[B]T[D][B]V
或

子矩阵[krs]由下式计算:
[krs]=[Br]T[D][Bs]V
对于各向同性体
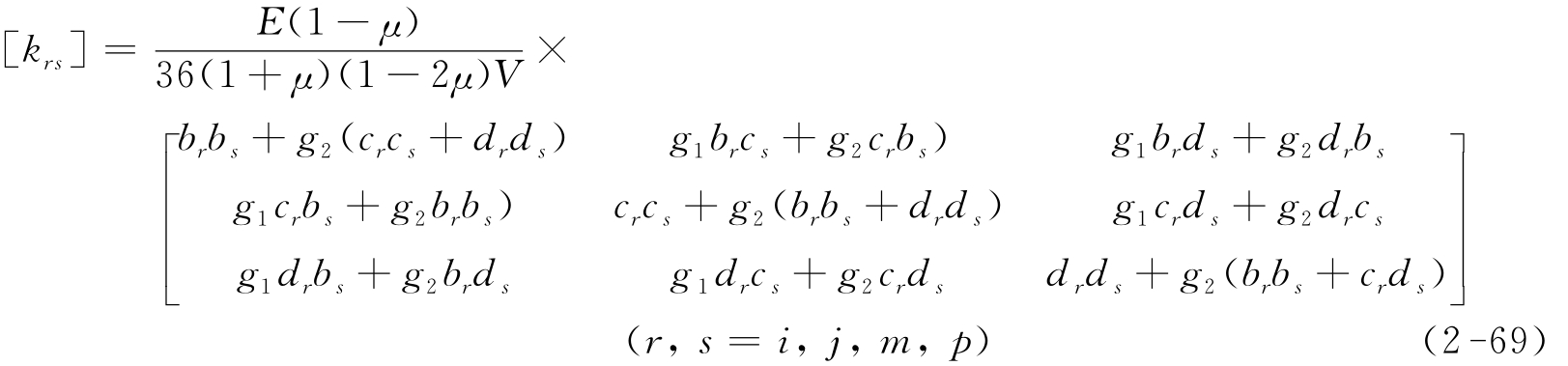
其中:g1=
4)四面体单元的结点载荷
下面用虚位移原理推导各种结点载荷算式。
(1)分布体积力
设单位体积内承受的体积力为

当单元中发生虚位移{r*}时,体积力{q}所做的功为
![]()
它应该等于等效结点载荷所做的功,即
![]()
由于虚位移{δ*}是任意的,由上式可得体积力{q}的等效结点载荷如下:
![]()
上式右边的重积分应当在单元e的整个体积内进行。
对于四面体单元而言,可求得i点的结点载荷如下:

式中 V——单元体积。
也就是说,3个方向的体积力都平均分配到单元的4个结点上。
(2)分布面力
设单元e是靠近边界的单元,其在边界S上作用着分布的面力{p}:
当单元中发生虚位移{r*}=[N]{δ*}e时,面力{p}所做的功为
![]()
它必须等于等效结点载荷所做的功,由此得到
![]()
上式右边的面积分是在分布载荷所作用的表面S上进行的。
对于四面体单元而言,如果其边界面ijm上作用着面力{p},在结点i、j、m上的集度分别为 ,则可求得结点载荷如下:
,则可求得结点载荷如下:
![]()
式中 Aijm——边界表面ijm的面积。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。











