



7.4.3 改进型ICCP匹配算法
1.ICCP算法的局限性
ICCP算法在如下情况下会出现误匹配问题:
(1)INS指示航迹与等值线梯度方向垂直;
(2)INS指示航迹与等值线梯度方向重合或平行;
(3)INS指示航迹附近存在多个同值等值线。
以上误匹配问题是由ICCP刚性变化的机理所致。
实现刚性变换需要平移和旋转两个参数,当匹配区匹配要素相似度较高时,则迭代搜索可能找到的是错误的等值线最近点,以及由此构成的序列,导致平移量t异常;此外,旋转角度反映的是最近点序列与指示序列间的方位关系,当指示航迹与等值线梯度平行或近似平行时,四元数法得到的旋转角非常小,由此导致旋转变换作用降低,指示航迹难以借助刚性变换纠正到真实航迹。导致上述问题的总根源在于距离等值线最近点的搜索方法存在缺陷。
为了解决上述误匹配问题,下面介绍预平移ICCP算法。
2.预平移ICCP算法
首先,给出目标函数M和角度限差Δβ两个评定误匹配的指标。
(1)目标函数M(C,TX)
若指示航迹与等值线最近点形成的航迹通过ICCP实现匹配,理论上,两个序列对应点应该非常接近,即由式(7-59)给出的目标函数M(C,TX)值应该非常小。否则,M(C,TX)就变得比较大,因此,M(C,TX)可以作为评定误匹配的一个指标。
(2)角度限差Δβ
INS尽管存在角偏差,但根据INS角漂移率,短时间内可认为角误差不变。因此,若利用ICCP实现了INS指示航迹与真实航迹的正确匹配,最终航迹段的方位与INS方位的差值Δβ应最小或不变。若存在误匹配,则Δβ存在较大的变化。因此,Δβ可作为评定误匹配的又一个指标。
基于以上两个指标,下面给出预平移ICCP匹配的思想及过程:
(1)以INS指示航迹质心为中心,通过估计INS的累积误差,设定匹配搜索区域,并格网化该区域。
(2)将INS指示航迹的质心平移到每个格网中心上,采用简化的ICCP算法对每个平移后的航迹进行一次粗匹配,计算纠正航迹的M(C,TX)值和Δβ值。
(3)遍历匹配搜索区内的每个格网,得到一组M(C,TX)和Δβ序列,并从中寻找M(C,TX)和Δβ最小、且满足临界值相对应的格网。
(4)将INS指示航迹平移到步骤(3)寻找到的格网中心上,用简化的ICCP算法进行一次粗匹配,得到概略的纠正航迹,并将之作为新的指示航迹。
(5)采用简化的ICCP迭代算法对新的指示航迹做连续迭代精匹配处理,在连续迭代过程中,M(C,TX)和Δβ最小的一组所对应的纠正航迹即为最终纠正航迹。
从以上过程可以看出,预平移ICCP算法的思想是在匹配区内先进行遍历搜索,对每个搜索位置进行粗匹配,在满足限差条件下确定序列重心的概略位置,然后在重心概略位置对应的格网内再进行迭代精匹配,最终确定纠正航迹。该过程通过遍历搜索,克服了传统ICCP迭代算法无法在等值线相似位置找到真实平移量t的缺陷,从而消除了产生误匹配的根源。此外,一旦找到了纠正航迹质心的概略位置,即找到了ICCP的适配区。适配区内等值线变化明显,匹配中可以得到理想的旋转角量θ。因此,概略重心位置的确定不但消除了平移量参数出现奇异的问题,同时也消除了旋转角奇异的问题,从而保证了简易ICCP刚性变化的正确性,消除了误匹配问题的影响,确保了匹配精度。搜索在每个遍历区实施匹配,必然增加了计算耗时。但由于是大格网,粗匹配,相对传统方法,实际耗时量增加甚少。
3.仿真实验及分析
为检验上述改进算法的正确性,以18.0km×30.0km海域的实测地磁数据为背景场,对其进行处理和格网化,开展如下实验:
(1)INS指示航迹与等值线梯度方向正交或近似正交
设定航迹长度为2150m,包含15个地磁特征测量点,航向基本与等值线方向正交,INS角偏差为3°,位置积累误差在x方向为500m,y方向为1500m,背景场格网间隔设定为50m×50m。
首先采用传统ICCP算法计算得到最终纠正航迹,如图7-6(a)所示。从图7-6(a)可以看出,最终纠正航迹与真实航迹存在较大的偏差,很明显产生了误匹配。采用预平移ICCP算法。以指示航迹重心为原点,设定匹配搜索区为6.0km×6.0km,划分整个搜索区为20×20个格网,格网点间距为300m。纠正航迹旋转角Δβ的临界值设定为3°,INS指示航迹平移到Δβ小于临界值且M值最小的格网点上,然后再进行简化的ICCP迭代精匹配,最终的纠正航迹如图7-6(b)所示。从图7-6(b)所示的最终纠正航迹和真实航迹的吻合度可以看出,预平移ICCP算法实现了正确匹配。
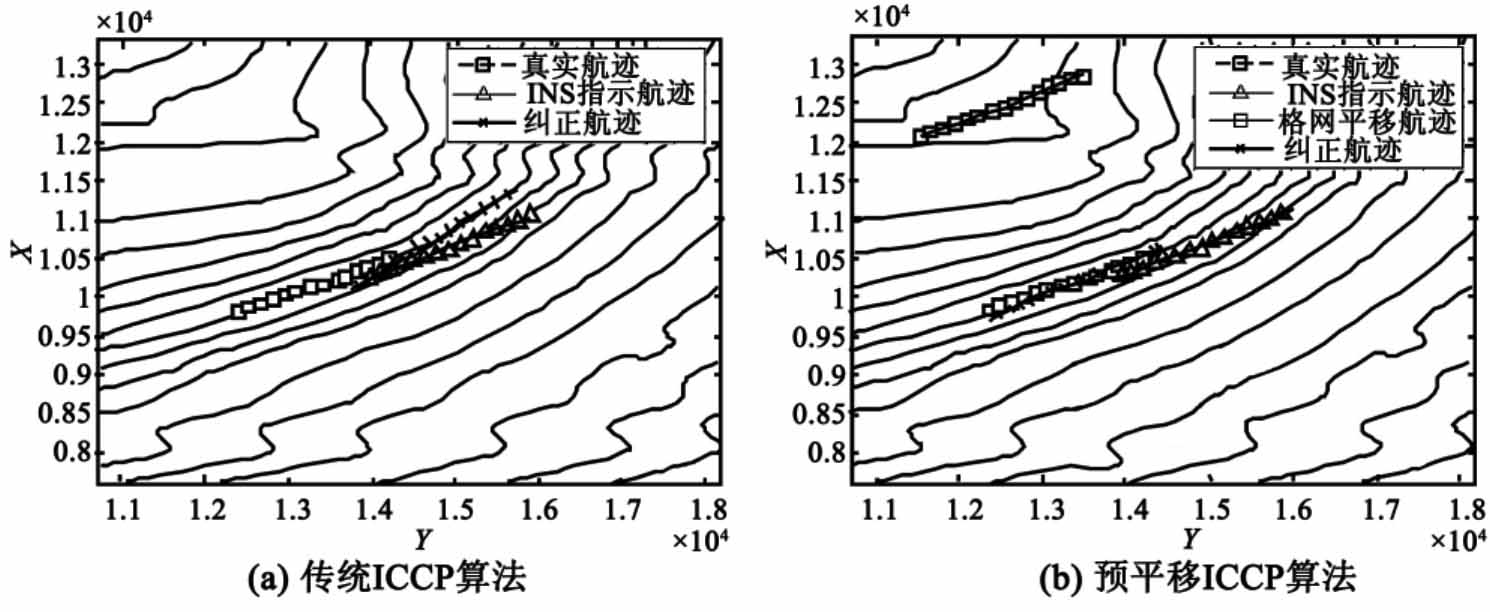
图7-6 传统ICCP算法与预平移ICCP算法匹配结果的比较
这两种方法的匹配精度如表7-3所示。
由图7-6、表7-3可以看出,当INS指示航迹与等值线梯度方向正交时,传统ICCP算法出现了误匹配,而预平移ICCP算法实现了正确匹配。
表7-3 ICCP算法与预平移ICCP算法匹配精度的比较

(2)INS指示航迹平行于等值线梯度方向
基于上述背景场,航迹长度为1640m,包含15个地磁特征测量点,航向基本与等值线梯度方向平行;设定INS位置积累误差x方向为-600m,y方向为1000m;其他参数设置同前面的实验。
首先采用传统ICCP算法,得到的纠正航迹点位平均误差为851.34m,M值为13.61m2,产生了严重的误匹配,匹配结果如图7-7(a)所示。采用预平移ICCP算法,搜索区和格网尺寸与前面实验相同,INS指示航迹平移到理想格网点后再进行迭代精匹配处理,匹配结果如图7-7(b)所示。统计结果表明,预平移ICCP算法的纠正航迹点位平均误差为30.07m,残余角度误差为1.738°,M值为1.80m2。
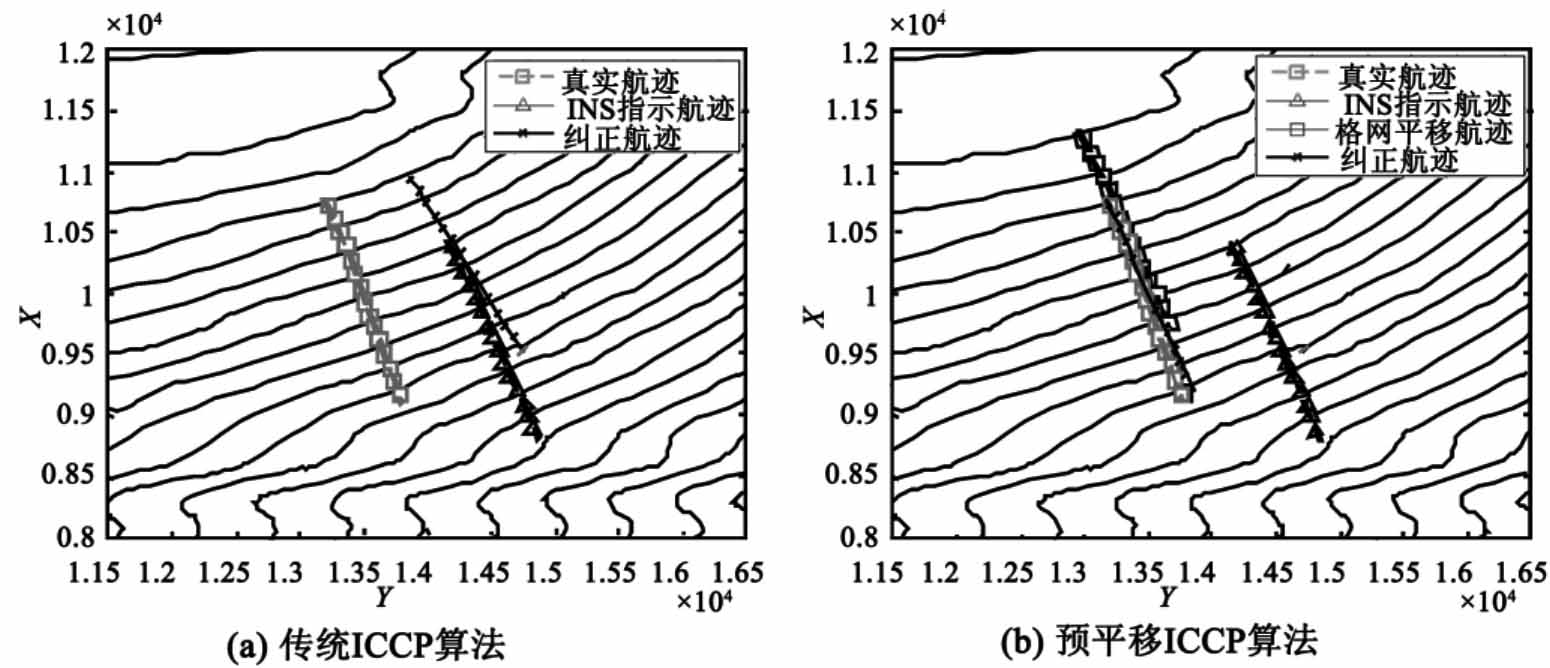
图7-7 ICCP算法
以上表明,当INS指示航迹与等值线梯度方向近似平行时,采用预平移ICCP算法仍然能够取得较满意的匹配精度。
(3)INS指示航迹附近存在多条同值等值线
相同实验区内,设定航迹长度约为2180m,包含15个地磁特征测量点,INS位置积累误差x方向为500m,y方向为1000m。真实航迹附近存在多条同值等值线,航迹线附近地磁变化特征相似,如图7-8所示,即通常意义上的误匹配区。
采用传统ICCP算法,得到的纠正航迹点位平均误差为1049.7m,M值为20.9m2,如图7-8(a)所示。从图上可以看出,纠正航迹基本在INS指示航迹附近,并没有发生较大变化。这是由于传统的ICCP根据相邻两次匹配结果差异满足限差的原则终止了迭代,变化特征不明显区域(即存在多条同值等值线),刚性变化中的平移量可能比较大,但存在多个解,传统ICCP算法无法识别哪一个解正确,即无法确定当前的真实位置,仅根据相邻两次迭代所得序列的差值满足最小限差这一原则实现迭代收敛,因此,刚性变换未能实现INS指示航迹向真实航迹的纠正,产生了误匹配。
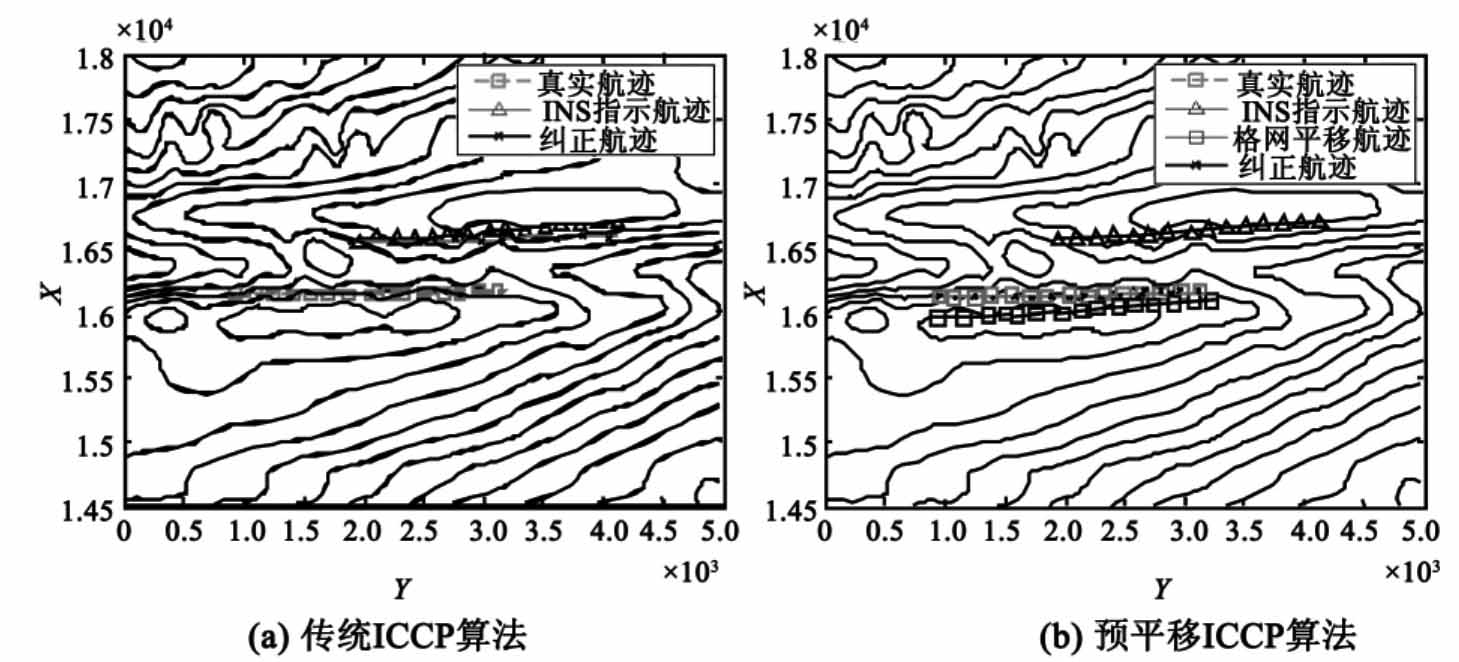
图7-8 ICCP算法与预平移ICCP算法对比图
采用预平移ICCP算法,找到了INS指示航迹到真实航迹间正确的平移量t和旋转角,实现了指示航迹到真实航迹的正确纠正(如图7-8(b))。通过预平移ICCP粗匹配的纠正,点位平均误差为35.0m,残余角度误差为-0.1221°,M值为5.16m2,点位平均误差大大减小。在以纠正航迹重心为中心的600m×600m范围内再做一次预平移ICCP精匹配,最终纠正航迹的点位平均误差进一步减小到1.2m,残余角度误差为0.0013°,M值为0.17m2。
以上表明,预平移ICCP算法通过预平移很好找到了适配位置,消除了特征相似区域传统ICCP出现的误匹配问题,克服了传统ICCP算法的不足。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。











