



5.5.2 基于等深线图像的地形匹配算法
对同一水域海床进行水深测量,若测量方法和计算方法相同,且计算采用的测点平面和垂直坐标框架相同,则背景场中相同水域的海床地形与实测海床地形的等深线分布和走向应相同或非常接近。因此,借助图像匹配思想,可以实现二者的匹配,进而从背景海床地形图像中获得潜航器当前的位置。
下面介绍这种匹配导航定位的思想。
1.地形等深线图像的生成
利用多波束获得的离散点数据绘制等深线有很多方法,如规则格网法。在形成规则格网中有距离加权法和Kriging法等。考虑内插的速度和精度,下面采用距离加权法。距离加权内插法的思想是:距离内插点较近的测点,其作用较大,相应赋予的权值也较大;反之,则较小。

式中,hj和hi分别是被插点深度和实测点深度, 是实测点到被插点之间的距离,n是被插点周围节点的个数。
是实测点到被插点之间的距离,n是被插点周围节点的个数。
利用以上方法可以获得格网节点的深度,并利用格网节点深度和坐标,获得不同给定型值的等深线,以用于后续的匹配中。基于上述等深线绘制方法,可以获得实测海床和对应的搜索区域的等深线。将生成的等深线转换成图像,形成等深线图像。等深线的生成过程如图5-11所示,生成的等深线如图5-12所示。

图5-11 等深线图像的生成流程
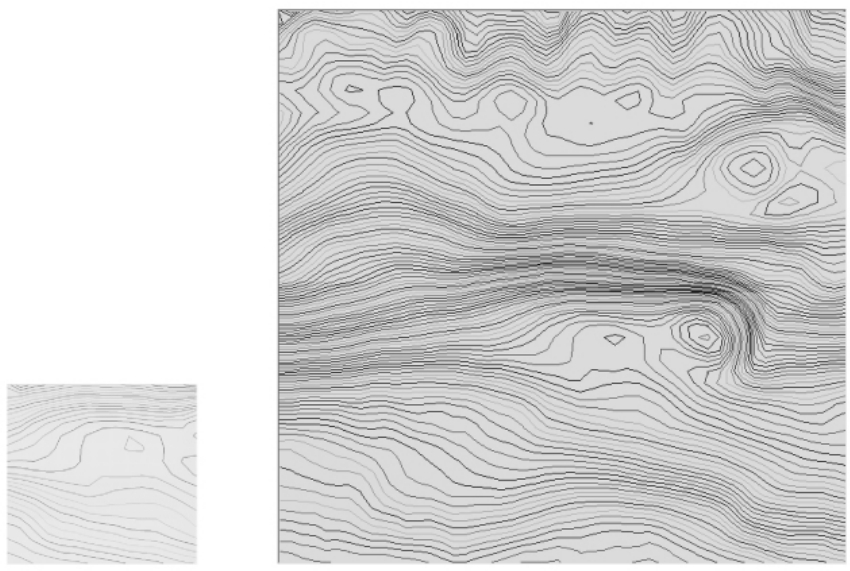
图5-12 实测(左)和背景(右)等深线图像
2.基于投影特征的图像匹配
目前,图像匹配方法有很多种,如归一化互相关匹配算法、掩模相关法等。为了改善图像匹配的速度,一些快速图像匹配算法,如多灰度级相关算法、多分辨率相关算法、序贯相似性检测算法SSDA(sequential similarity detection algorithm)等被提出。尽管传统的基于模板的图像匹配算法具有较高的匹配精度,但计算量太大,耗费时间较长。为了提高传统方法的匹配速度,可以减小图像的维数。为此,下面介绍基于投影特征的快速图像匹配算法。
基于投影特征的快速图像匹配算法的基本思想是,首先将一个二维图像转换为一维投影图像,以减少匹配的耗时量,提高匹配效率;在此基础上,结合递推思想,减少图像匹配在每个位置上的匹配计算量,以进一步减少图像匹配的耗时量。下面详细介绍这种匹配算法的原理。
首先,将二维灰度图像转换成一维投影数据,然后再基于一维数据进行图像匹配。由于减小了数据的维数,匹配速度得到了提高。投影原理如图5-13所示。
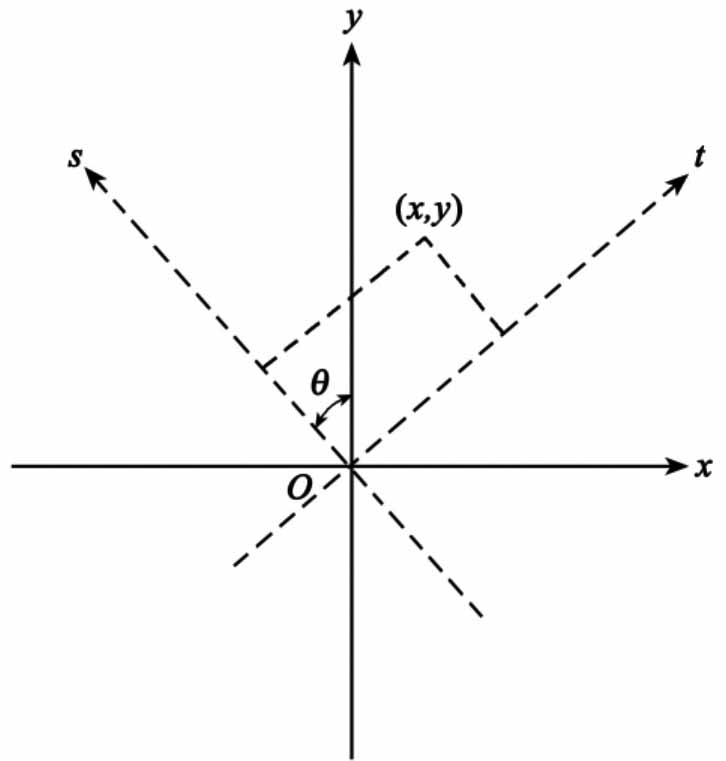
原坐标(x,y)到投影坐标(t,s)投影变换原理图
投影定义为下式:
![]()
式中,f(x,y)为图像函数,s为投影方向,t为其垂直方向。当θ为固定角时,p(t,θ)是关于t的函数。
根据图像灰度的空间特征,利用一维投影数据的差分字符串,可实现图像的快速匹配。相邻像素灰度值的相对大小关系是相同的,如果某搜索窗口与模板相匹配,那么相应像素之间的灰度大小关系应与模板一致。反之,如果不满足这个条件就可以认为与模板不匹配。基于此,对数据进行一维投影后,对字符串进行差分处理。即在相邻的两个数据中,用后面的减去前面的,结果为正,记为1;结果为负,记为0。这样,便可以由一个长度为N的一维数据得到一个一维的0-1字符串。该字符串就构成了表征模板或者搜索窗口的特征,匹配运算将在两个0-1字符串之间进行。匹配过程如图5-14所示。
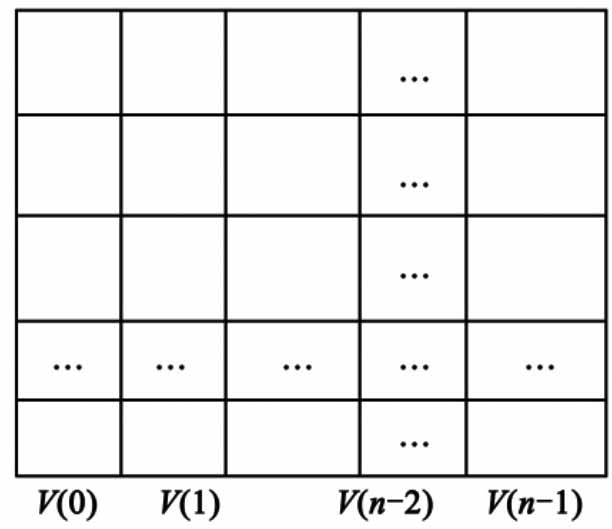
图5-14 匹配运算示意图
若定义模板左上角为原点,则图像的一维灰度投影就是将模板图像T的左上角作为原点按列做灰度值叠加,并求取均值。
![]()
若匹配图像(G)的尺寸为M×N,表示为G(x,y);模板图像(g)的尺寸为m×n,表示为g(x,y),从匹配图像左上角截取的、与模板图像同尺寸的子图形表示为gi,j,则子图形可以表示为:
![]()
在给出模板的一维灰度投影图像后,就可以得到长度为n的一维矩阵M。
此外,在匹配图像中一次取得(M-m+ 1)×(N-n+ 1)个子图像进行一维灰度投影,得到(M-m+1)×(N-n+1)个长度为n的一维矩阵。由此,可以计算一维相关系数R(i,j)
![]()
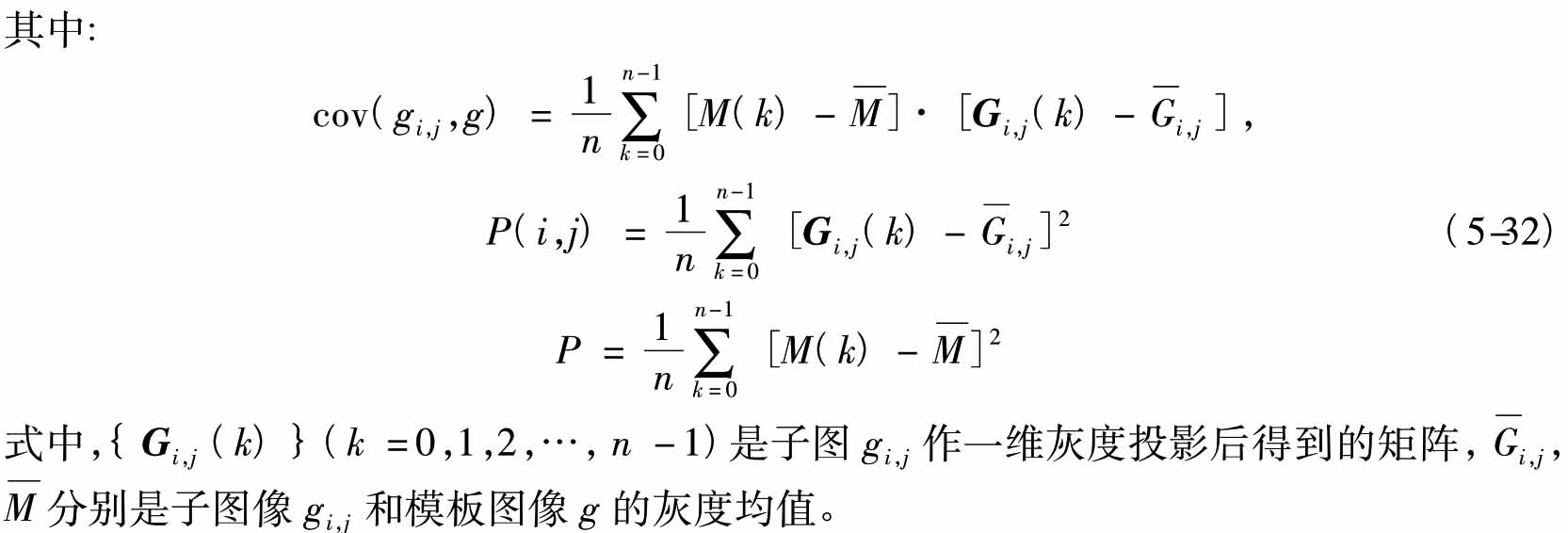
由于gi+1,j是子图像gi,j向右移动一列对应的图像,gi+1,j的前n-1列是gi,j的后n-1列。同样,对图像作一维灰度投影后,所得矩阵也具有这个性质。这样,在计算P(i+ 1,j)时,可以用P(i,j)数值计算来表示,从而缩短了匹配计算的耗时量。
可以证明:
相似性系数R(i,j)越大,模板图像和子区图像相似度越高。
3.等深线图像匹配过程
下面给出完整的等深线图像匹配定位过程。
首先,定义一个概略的图像匹配搜索范围,即在背景图像中,实测图像寻找与之对应位置的搜索区域。搜索区域过大,将会增加搜索的耗时量,降低匹配效率;过小则可能在该区域内无法寻找到与实测图像对应的位置。因此,匹配搜索区的给定要恰当。搜索区的划分需要根据惯性导航系统INS的漂移率、航行时间、航速等因素,根据一点一方位推算原则,来估计INS的位置积累误差。基于该积累误差,在背景海床地形中框定搜索范围。
其次,根据搜索区内的背景海床地形数据和多波束实测的实时海床地形数据绘制等深线,并形成两套等深线灰度图像,即参考等深线图像和匹配等深线图像。上述处理过程实现了地形匹配向图像匹配的转换。
然后,基于以上给出的投影特征图像快速匹配技术,对这两套图像实施匹配。
最后,根据优化的图像匹配结果,从参考等深线图像中找到与实测等深线图像对应的像素。由于参考图像或背景地形图像中像素与地理坐标对应,两套图像实现了匹配,实测图像像素实现了与背景图像像素的对应,即找到了多波束实测区域内不同位置的坐标。由于多波束是固定在载体上的,因此,根据实测图像数据中多波束中央波束的位置,即可确定潜航器的当前位置。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。











