



13.2.3 绘制环形C匝道
1)C匝道线形
C匝道为单车道,设计速度为40km/h,出口设计为直接式减速车道,入口与H匝道相连,而H匝道为双车道,故入口处C匝道设计线与H匝道设计线相差二分之一个车道宽(1.75m)。C匝道线形为直接式减速车道—圆曲线RC1—卵形曲线—圆曲线RC2—S形曲线—圆曲线RC3—S形曲线接入H匝道。C匝道上跨主线K1后与H匝道汇流,图13.12为C匝道线形。
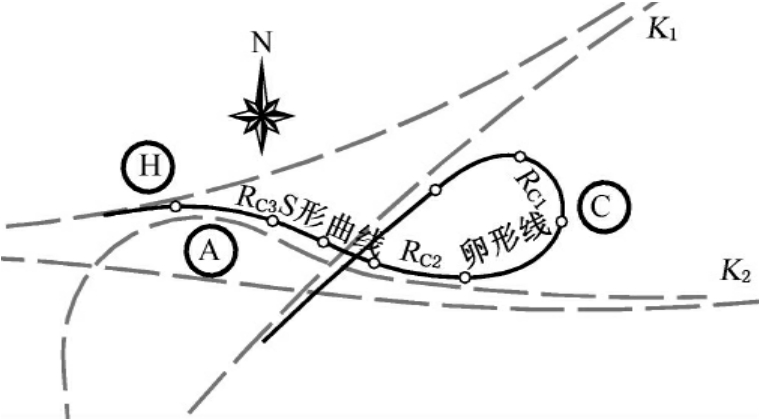
图13.12 C匝道线形
2)C匝道线位的设计要点
先将圆RC1、RC2、RC3的大致位置摆好,注意控制与A匝道线位的距离,保证路面宽度范围内不相交;注意线条流畅顺适,造型美观,其中圆RC2的位置是整个线位的关键。
3)C匝道线位的设计参数
为控制环形匝道的占地,圆曲线RC1半径取60m。C匝道平面线位由卵形线、S形曲线组成,同时纵断面上跨主线K1后再下坡,从平纵组合上考虑,圆曲线RC2、RC3的半径不宜过小。圆RC1与圆RC2之间以卵形曲线相连,卵形曲线的两回旋线参数宜选R2/2≤A≤R2(R2为小圆曲线半径);两圆曲线半径之比,以R1/R2=1.25~5为宜(R1为大圆半径,R2为小圆半径);关于S形曲线的设计要求,在前面A匝道线位设计参数中已阐述。影响立交线位的因素甚多,各参数应尽量满足以上要求。
综合考虑以上设计要点及设计参数,并根据表13.1的规定,圆曲线RC2、RC3的半径均取为300m。
4)运用“动态变速车道(dtbscd)”和“模式法(msf)”命令设计线位
(1)先设计直接式减速车道
运行“动态变速车道”命令时提示:
选取主线: ∥选择主线K1
选取连接单元(圆或圆弧实体): ∥选取圆曲线RC1
选取终止控制单元(圆或圆弧实体): ∥选取圆曲线RC2
接着弹出“动态布设直接(平行)式变速车道”对话框,如图13.13所示。
在对话框中选择直接式减速车道,单车道出口渐变率取1/25。单车道匝道W1、W2、W3、W4的取值与双车道有所不同:
其中W1表示匝道渐变段起点至主线设计中心线的距离。根据图13.2、图13.3所示的横断面形式,单车道渐变段起点应位于主线最外侧行车道的中心,即
W1=1.5+0.75+3.75+1.875=7.875m
W2表示匝道渐变段终点至主线设计中心线的距离,C匝道行车道偏离主线外侧车道一个车道宽的位置,即
W2=1.5+0.75+7.5+0.5+1.75=12m
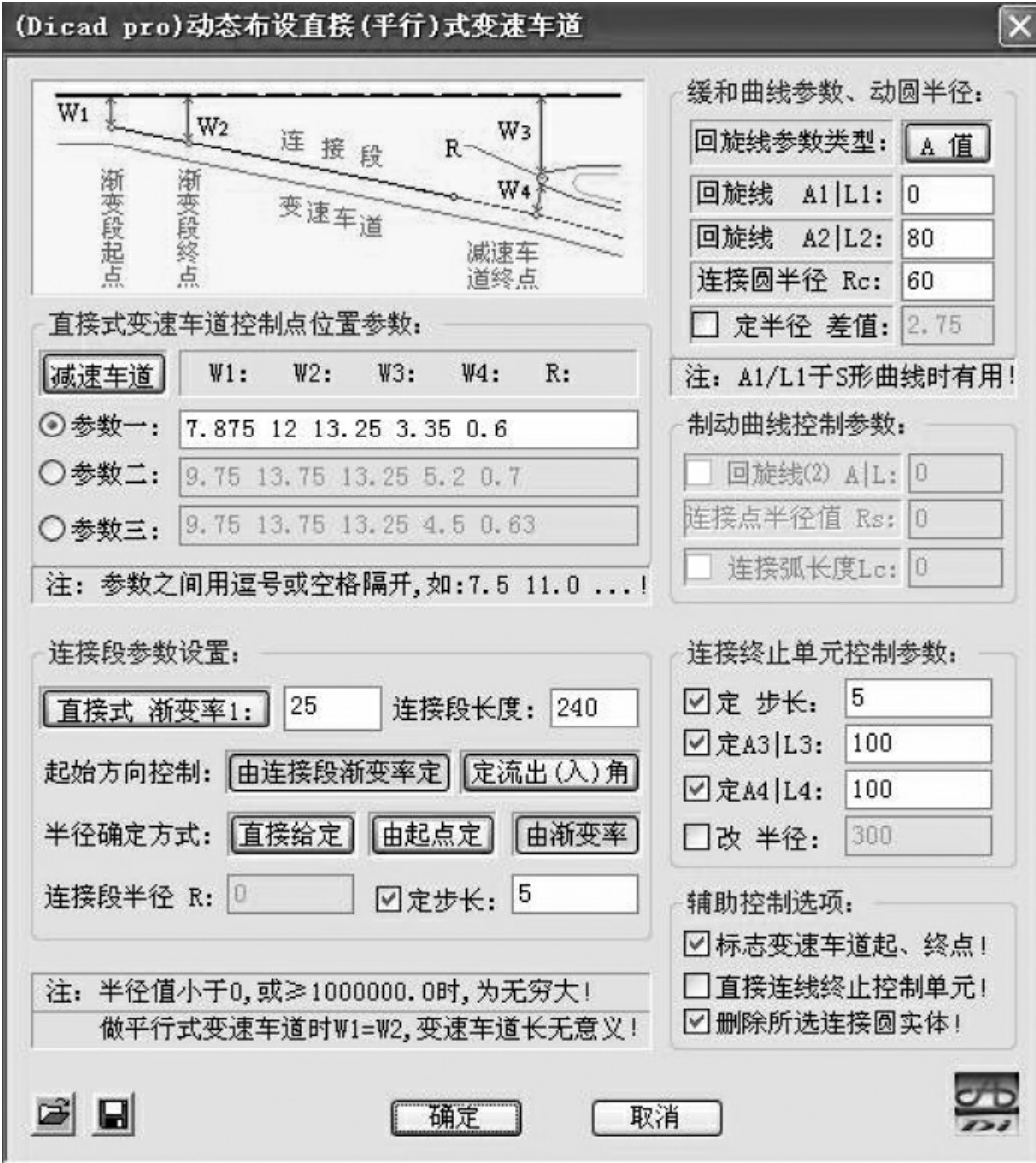
图13.13 单车道直接式减速车道对话框
W3表示匝道减速车道终点处主线硬路肩外边线至主线设计中心线的距离,加上分流鼻处圆角偏宽加宽值。与双车道取值一样,取13.25m。
W4表示匝道减速车道终点处匝道左侧硬路肩外边线距匝道中心线距离,加上分流鼻处圆角偏宽加宽值,偏宽值如表13.6中的规定,单车道匝道出口匝道偏宽值为0.6m。
W4=1.75+0.5+0.5+0.6=3.35m
R为分流鼻端半径,单车道匝道出口分流鼻端半径为0.6m。
根据设计要求依次输入W1、W2、W3、W4和R值,各参数间以空格或逗号隔开。
对话框参数调整好后,点击确定键拖动线位,直至所有参数满足《路规》(2006)要求。
(2)用“模式法”将圆曲线RC2、RC3和H匝道连接起来
运行“模式法”命令时提示:
选取起始控制单元(直线、圆或圆弧): ∥选取圆RC2
选取终止控制单元(直线、圆或圆弧): ∥将H匝道的圆曲线向外偏置一个车道半宽1.75m作为终止控制单元
选取连接单元(圆或圆弧实体): ∥选取圆RC3
接着弹出如图13.14所示的“动态模式法”对话框,先确定对话框中的基本参数:
①“起始方向”是指从起始单元开始,第一段缓和曲线的转向,这里应该选择顺时针。
②“拖动位置”可以拖动动圆圆心或刚才所定的选取点。当圆曲线半径较大而屏幕范围较小,圆心位置可能在屏幕以外时,可通过选取点来拖动动圆。
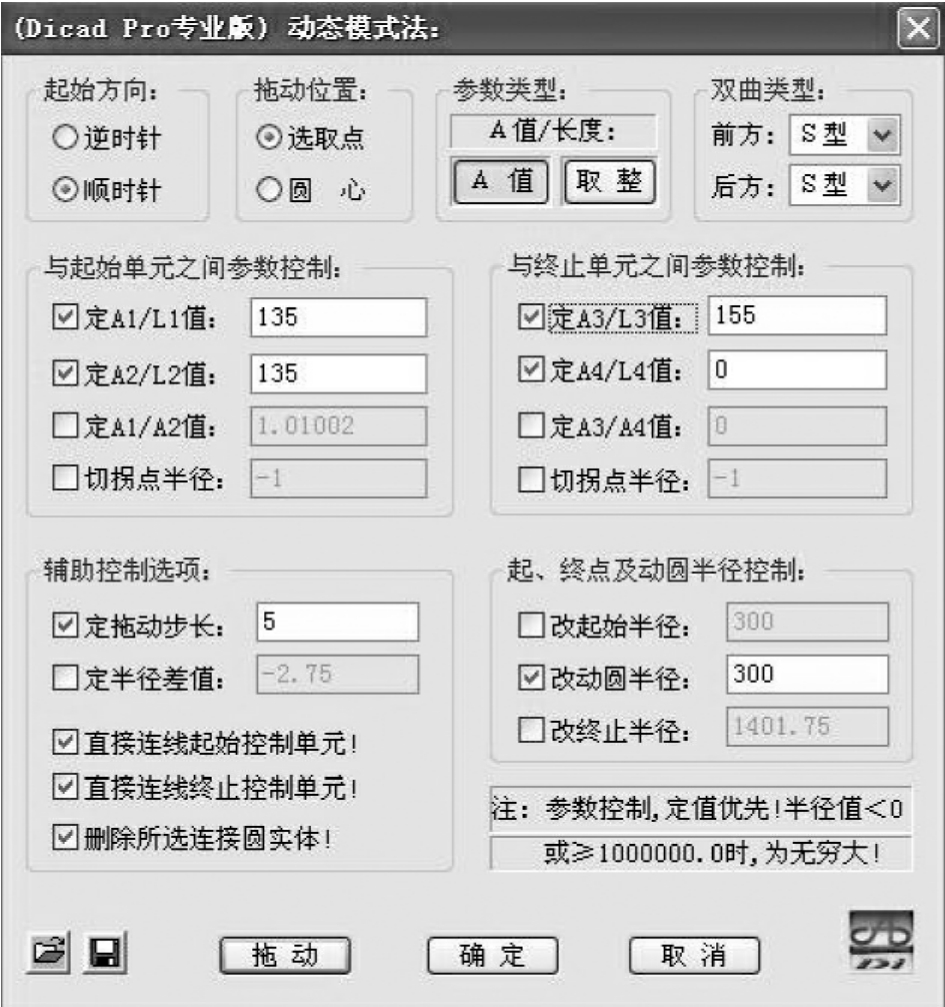
图13.14 “动态模式法”对话框
③“参数类型”可以选择缓和曲线用长度L或A值表示,相应的以下参数就表示为长度L或者A值。在设计中可以随时调出对话框,通过此平方按钮切换显示A值或长度值,看是否满足设计或规范要求。
(4)“双曲类型”动圆与起始单元和终止单元相接的线形分别有C型、S型、E型(卵型)和直圆模式,这里均为S型。
(5)与起始单元之间的参数A1、A2和与终止单元之间的参数A3、A4通过拖动控制。这里终止单元圆曲线半径为1 401.75m,《路规》(2006)中设计车速40km/h时不设超高圆曲线最小半径为600m,故圆曲线与终止控制单元间可以只设一条缓和曲线A3,令A4为0。
(6)S型曲线或C型曲线在拐点处曲率半径一般为无穷大,当地形受限制时,用无穷大半径的线位可能难以放下或参数无法满足规范要求,此时可以改变切拐点半径,保证在A值较大的情况下进行线形设计,但是切拐点处半径一般应满足《路规》(2006)不设超高圆曲线最小半径值,此种情况一般运用较少。
(7)“定拖动步长”表示拖动时各参数以该步长取整。“定半径差值”主要用于A喇叭内环匝道的设计,内环终点半径与对向双车道匝道半径的差值,增大为正,减小为负,一般为负。
(8)线位设计中若起点、终点和动圆半径需要调整,直接在对话框“起、终点及动圆半径控制”中修改,无需删除线位,重新画圆。
对话框基本参数设定完后,点“拖动”键开始拖动线位,拖动中若想修改或确定参数,键入热键C可调出对话框。
这样,通过“动态变速车道”命令和“动态模式法”命令就可以将C匝道线位完整设计好了。
接着可以设计这座立交的其他匝道,B、D、E和G匝道线位设计方法分别与A、C、H匝道相同。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。












