



§4.5 数据后处理质量控制与评价
数据后处理质量控制主要包括激光点云各航带间的吻合情况检查、激光点云分类检查、航片连接点精度检查以及DOM、DEM数学基础的检查。
在检查时采取人机交互的检查方法进行,作业人员先进行自查,确认无误后按相关规定整理上交资料成果,由质检部门进行最终检查。这两步均为100%的成果全面检查,若发现质量有问题均需重新返工。这一阶段成果检查所需时间最长、工作量也是最大的,但只有严格的要求才能保证最终成果的优良率。其工作流程图如图4-6所示。
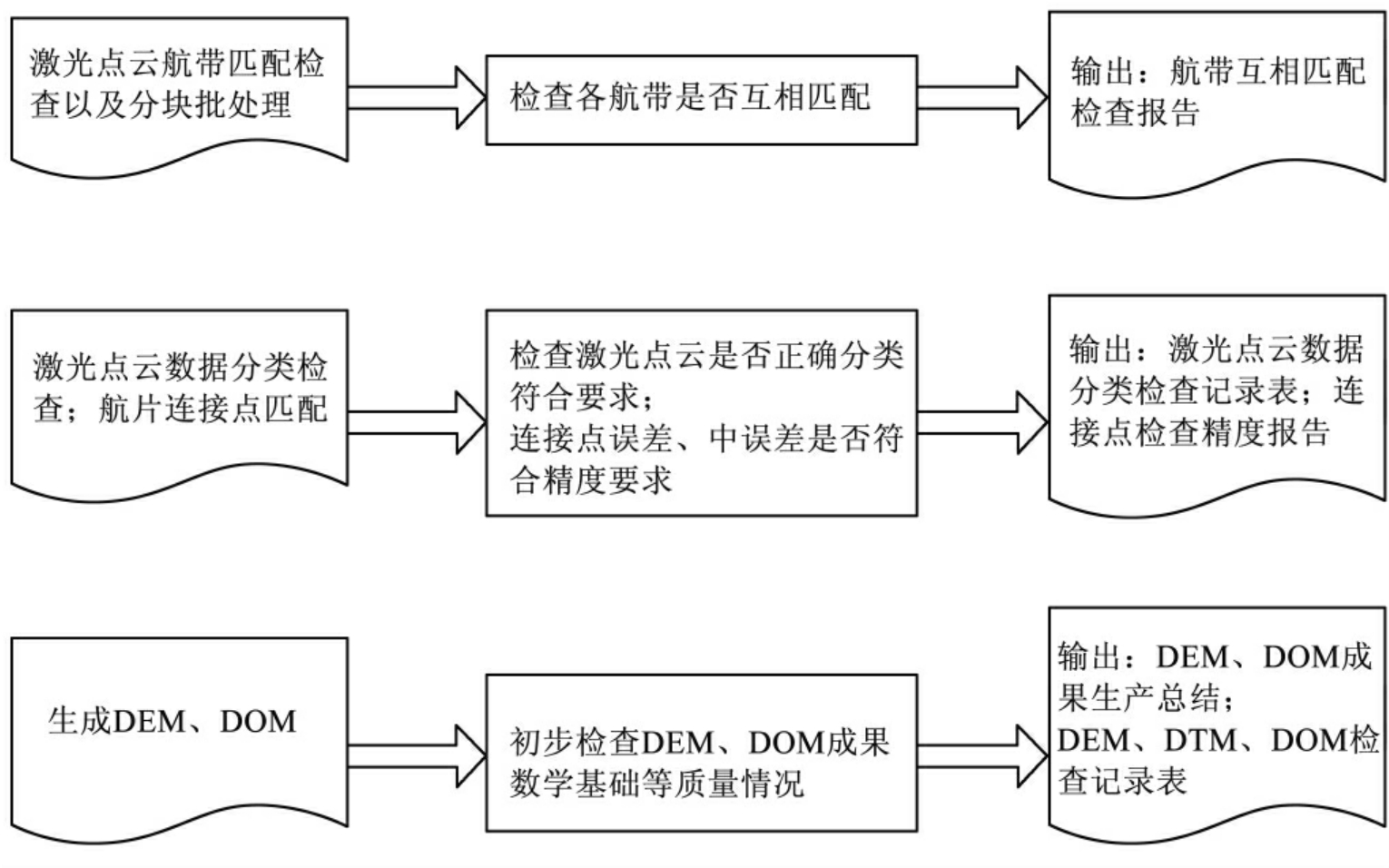
图4-6 数据后处理质量控制流程示意图
4.5.1 各航带间的激光点云吻合情况检查
各航带间的激光点云吻合情况检查是对激光数据任意方向拉剖面(断面)观察,检查两个航带之间同名激光点的高差和位置偏移,从而确定其误差。
图4-7显示两条航线数据明显分开,说明这两条航带数据吻合不好。

图4-7 航带检查(1)
图4-8和图4-9显示两条航线数据交错,说明这两条航带数据吻合很好。

图4-8 航带检查(2)

图4-9 航带检查(3)(放大图)
导致航带间数据吻合不好的主要原因是系统集成误差造成的,通过对惯导系统和激光雷达仪之间的偏心角进行修正,能有很大程度的改善。
航带间的高差最大不应大于0.2m。
4.5.2 激光点云分类质量控制与评价
激光点云分类是对激光点云数据处理的主要工作内容。利用实际工程中额外采集的地面控制点加入到数据分类处理及检查中,以提高分类成果精度的可靠性。使用成熟的过滤算法执行自动处理,剔除建筑物或植被上的激光点;使用同步获取的影像数据辅助进行激光分类和质量控制;由经验丰富的人员进行手工分类,以检查自动分类的精度并做相应手工分类处理。
激光点云分类的质量检查就是检查裸地表、建筑物和植被等数据是否按当前工程项目要求划分到相应的类中。其具体检查方法是通过剖面(断面)和构TIN,采用人机交互的检查方法进行检查。如图4-10~图4-13所示。

图4-10 未分类点云的剖面图

图4-11 已分类点云的剖面图

图4-12 未分类点云构TIN图效果图

图4-13 已分类点云构TIN图效果图
在必要时,可以通过对激光点云进行着色,叠加航片进行检查,并结合航片判读地物,这样可以更直观、更准确地进行检查,确保分类成果更加准确无误。
4.5.3 影像连接点质量控制
航片连接点的用途是获取激光雷达仪与航摄仪之间的偏心角。如果机载激光雷达仪和航摄仪相对固定,航片连接点匹配的工作就可以省去。但通常激光雷达仪与航摄仪都是独立分开的,所以正常情况下都需要进行航片连接点匹配。
连接匹配点都是从地面上选取,不能从房角或别的高物上选取。检查时可以按一定的比例进行抽检,统计其平均中误差、最大误差、连接匹配点个数和连接匹配点分布情况等。连接匹配点的误差不能超过平均误差的1.5倍,且每张相片上至少需要4个点,呈四角分布。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。










