



15.1.3 评价函数的构成与权因子
光学自动设计时,对于光学系统光学特性以及像质要求都可认为统称为对像差的要求。上面讨论像差方程组AΔx=ΔF时,指出像差数M大于自变量数N时可采用阻尼最小二乘法。但是,这里并没有对像差数M和自变量数N加以限制,M大于或小于N均可适用,阻尼最小二乘法对像差参数没有特殊要求,因此构成评价函数的像差参数可以是各种不同像质评价方法中像差,如单项独立几何像差、垂轴像差、波像差、光学传递函数等等。因此在光学自动设计程序中,一般都预先设定了由固定的像差参数组构成的评价函数,使用时不必考虑确定像差参数的问题。
式(15.6)中Φ(x)评价函数取规化像差剩余量平方和形式,当Φ(x)达到某个极小值时,各种规化像差剩余量μiφi绝对值在数值上应趋向一致。即
|μ1φ1|=|μ2φ2|=…=|μMφM|=c
或写成
![]()
式中,Fi-F0i为系统的残余像差值,c为常量。因此,确定权因子大小的一般原则是:权因子应与各种像差允许的残余像差值成反比,使各种规化像差值在数量上趋于一致。光学自动设计程序中一般把权因子分为两部分,即
μi=μi1·μi2 (15.15)
其中,μi1为自动权因子,μi2为人工权因子。自动权因子μi1由程序根据式(15.14)给定,它的目的是使各种像差在数量上达到初步统一。人工权因子μi2则由设计者根据系统的实际校正状态加以确定,一般默认值取1。
实际光学系统除了光学特性和成像质量的要求而外,对系统结构参数还有一些具体的限制,如透镜的通光口径、中心厚度、边缘厚度、玻璃材料参数以及透镜间的空气间隔等,这类限制称为边界条件。在阻尼最小二乘法程序中,把边界条件与像差一样对待和处理。当某个参数违背边界条件时,把它的违背量给定适当的权因子作为一种像差进入评价函数求解。这一过程在光学自动设计程序中都有预先安排,设计者只需确定相应的边界条件即可。
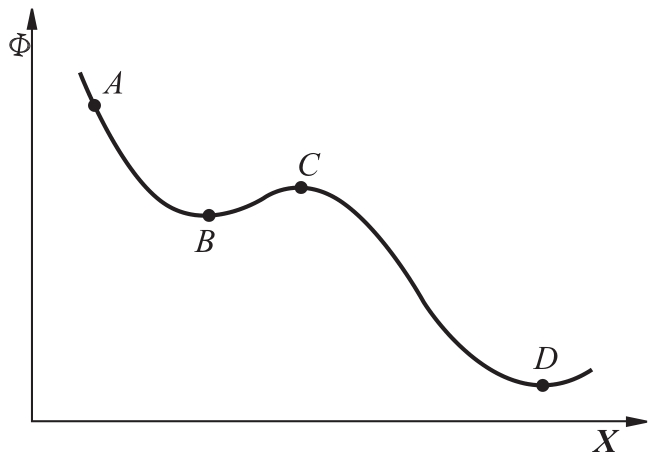
图15.1 局部极值示意图
阻尼最小二乘法最大特点是它不直接求解像差线性方程组,而是通过求评价函数的极小值解,求像差线性方程组的最小二乘解。其优点是可以适用于各种不同类型的像质评价方法,不论像差数有多少以及是否相关,都可以进行求解,使系统评价函数到达极值。当然,也有一定的缺点,阻尼最小二乘法只能使系统到达邻近原始系统的那个极值,如果这个极值是一个局部极值,而不是最小极值,程序就无法跳出局部极值,必须通过人工干预。因此,原始系统的好坏决定了评价函数可能下降到哪个极值。如图15.1所示原始系统的评价函数值处在A,则阻最小乘法程序只能使它下降到局部极值B,而不能到达D。程序既不能判断系统是否存在更小的极值D,也无法跳出局部极值B。这是因为要跳出局部极值B,评价函数必须首先上升到C,而程序是不允许评价函数上升的。某一种结构型式,存在几个局部极值以及不同极值在系统结构上有哪些特点,自动校正程序都不能直接解决这些问题,必须设计者通过大量的研究工作才能清楚。因此原始系统结构参数确定,必须依靠设计人员的像差理论知识和实际经验。确定系统当前是处于局部极值,还是最小值,比较困难。只能依靠设计者对系统像差特性的了解进行判断。如果确定系统当前处于局部极值,则应通过大幅度修改系统结构参数以后,再重新进入自动校正,使系统跳出局部极值。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。










