



8.2.3 系统误差分析
根据系统导航的信息源,组合导航系统的导航精度主要受制于两个主因素源的影响,其一是INS误差,其二是水下地形匹配辅助导航系统误差。相对这两个影响,信息融合等带来的误差较小,可不予考虑。
1.INS误差
陀螺仪、加速度计和惯性平台是惯性导航系统的主要组成部分,因此,惯性导航系统的误差也主要源于这三个部分。
陀螺仪的测量精度主要取决于陀螺仪的随机漂移率。目前,中等精度的惯性导航系统位置精度要求为1.0n mile/h,相应的陀螺仪随机漂移率要求0.01°/h。
在惯导系统中,高精度的加速度计是最基本的敏感元件之一。加速度的测量值直接影响着载体运动速度和位置的计算精度。用于惯性导航的加速度计灵敏限要求必须达到10-5 g。
惯性平台的误差主要来源于其平台的结构误差和工作原理误差。
结构误差主要由于安装所引起,而工作原理误差主要由初始化真北方位误差引起。通常有两种真北方位的引入方法,一种为外部引入,即借助外部手段将真北引入平台;另外一种是自主式对准真北。无论哪种方式,均会带来一定的误差,且该误差为常误差。
将上述引起的误差分解到x和y方向分别是σINS-x和σINS-y,引起的点位误差为σINS-p。
2.水下地形匹配辅助导航系统误差
根据地形匹配导航定位系统的原理及组成,系统定位的精度主要受3个因素影响,即背景场精度、在航测深精度以及匹配定位算法精度。
1)背景场精度
海床地形背景场是地形匹配导航的参考,其精度直接影响着匹配精度。海床地形背景场精度主要受下列因素的影响:
(1)测深精度:地形背景场是经测深数据处理后形成的,测深精度直接决定着背景场的精度。按照海道测量规范,水深测量主要划分为如下四个级别的测量:
一级测量:适用于海道测量部门明确规定的重要海区,在这些海区,船舶只能以最小吃水净深航行,并且其海底特征可能对船只航行有危险,例如对重要海峡、港口、码头、锚地和海底浅层结构的详细探测。一级测量要求必须把所有误差源降到最小限度,一级测量的测线间距要小,并要求使用侧扫声呐以及由换能器阵列组成高分辨率多波束回声测深系统。测深需实现100%的海底覆盖率。测量时必须保证测深仪器能分辨出大于1m3的物体。
二级测量:适用于其他港口、入口航道、一般的沿岸和内陆航道,在这些海区,船只的吃水距海底有较大的净深,或海底的地质特征对船只航行的危险较小(例如松散的淤泥和沙底质)。二级测量应限于水深小于100m的海区使用。虽然它对海底覆盖的要求没有一级测量那么严格,但在海底特征对船只有潜在危害的区域仍要求100%全覆盖。在覆盖区域,测深仪器必须保证能分辨出20m水深内大于2m3的物体,或水深超过20m时,大于10%水深体积的物体。
三级测量:适用于水深浅于200m且不被一、二级测量所覆盖的海区。在这些海区内,普通的水深测量方式就能充分保证海底的障碍物不会危及船只航行。在各种海事活动中,当采用高等级的海道测量不大合适时,就要采用三级测量。
四级测量:适用于水深超过200m且不被一、二、三级海道测量所覆盖的其他所有海区。
根据以上标准,IHO确定了新的海道测量最低精度指标(如表8-1所示)。将表中列出的相应的a、b值代入式(8-16),可计算出不同级别的测深精度。
![]()
式中a、b为深度误差常数和深度相关误差系数; b·d为深度相关误差; d为深度。
表8-1 新海道测量最低标准
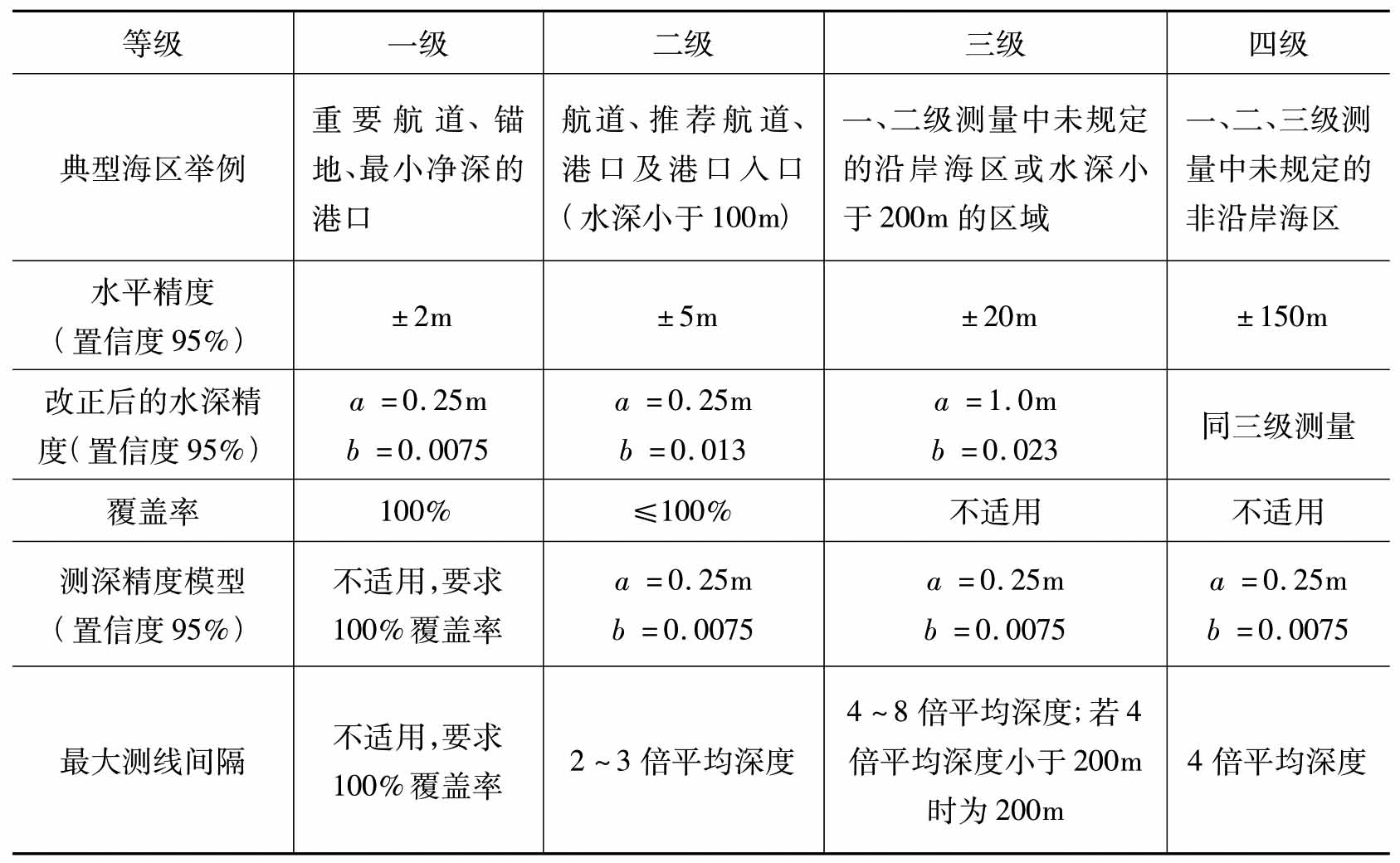
水深精度应理解为改正后水深的精度。在确定水深精度时,需对各误差源进行定量表示。由于水深测量的特点是测量深度数据缺少多余观测值,因而水深精度主要取决于对影响水深值的系统误差和可能的随机误差的估计精度。对影响探测水深值的所有可能误差的综合估计是提高水深精度的关键,所以要考虑所有误差源综合影响以得到总传播误差。总传播误差由所有对测深有影响的因素所造成的测深误差组成,其中包括与声信号传播路径有关的声速误差、测深与定位仪器自身的系统误差、潮汐测量和模型误差、船只航向与船摇误差、换能器安装不正确引起的定位误差、船只运动传感器的精度引起的误差以及数据处理误差等。这些误差都会影响探测水深的精度,应当采用统计的方法,对所有已知的误差进行考虑,以确定水深精度。经统计确定的总传播误差(置信度为95%)用于描述水深精度。由于上述误差可以分为误差常数和水深相关误差,表8-1中给出了经过专家论证的误差常数a和水深相关误差b值,利用所给的公式来计算各级测量的水深允许误差,其置信度为95%,依次作为约束各级测量的测量数据精度的限差。
为了解释所有的误差源,必须对误差大小进行估计,国际海道测量组织在S-44测量标准中给出了其估计形式:σrpd(2drms)

式中,2drms即径向位置误差(置信度为95%),是下列误差平方和根的2倍:定位系统引起的误差σn、水深测量误差σd、横摇误差σr、纵摇误差σp、航向(陀螺罗经)误差σg和声速误差(波束角分量)σv。等式中d是换能器的水深,v是平均声速,θ是从最下方起算的波束角。
上面讨论的是根据多波束系统获取的数据误差源及其估计公式,而对于其他测深仪器测深误差的估计,则可以根据不同仪器的实施探测情况,对一些误差进行取舍。例如,单波束测深一般情况下可以不考虑σr、σp、σg等误差的影响,但对于倾斜的海底必须进行海底倾斜改正。又如测量船的动态吃水影响误差,上式并没有估计,对于大多数高精度探测而言由于不同船速下动态吃水影响不同,因此还需估计测量船动态吃水误差。
我国《海道测量规范》中以回声测深仪为例,给出了水深测量极限误差(置信度95%)的规定(表8-2),同时《海道测量规范》也对主检查线水深比对及图幅拼接比对的限差作了规定。在进行系统误差检验及粗差检验后,由重合点水深(图上两点相距1.0mm以内)所列出的主、检测深点不符值限差为表8-3,规定超限的点数不得超过参加比对总数的15%。
表8-2 主检查线水深比对及图幅拼接比对的限差规定

表8-3 剔除系统误差和粗差后,主检不符值限差

(2)内插精度:实际测量中,由于测量船的机动性,或因海床地形数据来自电子海图或数字化的纸质海图,均会导致测点分布不均匀。而海床地形背景场通常是以格网或者等深线的形式存储,无论采取何种存储方式,均需要基于周围实测数据进行内插处理,才能获得格网节点的水深(格网存储方式)以及型值点(等值线存储方式)。因此,内插精度也是影响海床地形背景场精度的另一因素。
影响内插精度的因素主要有两个:
其一:内插点周围测点的测深误差;
其二:内插方法引起的误差。
前者已经在前面论述,而对于后者,则需要视不同内插方法而定。
2)在航测深精度
在航水深观测序列的精度主要受如下几个因素影响:
(1)测深精度。测深精度在前面已作了表述,这里不再赘述。
(2)测深数据处理精度。
由于潜航器实测的深度是相对换能器的,而背景场反映的深度实际上是基于某个海洋深度基准下的深度,因此,要实现实测深度序列或条带与背景场海床地形的匹配,就需要将实测的相对换能器的深度转换为相对于背景场同深度基准下的深度。
测点实际深度Dp为:
![]()
式中,DS为回声测深系统实测的相对换能器的深度; DV为换能器的深度或者载体的深度,通常借助压力计来获得。
若深度基准面下载体所在水域的潮位为HS,则该基准面下水下测点的深度Hp为:
![]()
从以上计算模型可以看出,测点的实际深度除受声呐测深系统测深精度影响外,还受潮位因素影响,以及压力式传感器确定的换能器深度/潜航器深度的影响。
(3)定位精度:在航测深期间,潜航器的位置即测深换能器的位置是通过INS提供的。如前所述,这时INS尽管存在积累误差,但认为INS在此期间提供的测点间相对位置是正确的。实际情况是INS在任何一次测量中,因为其漂移率导致推算所得位置存在误差,只不过这种点间误差相对积累误差要小得多。
下面根据一点一方位定位原理,推算定位误差。
![]()
式中,v为潜航器速度; t为点间航行时间,A为航行方位。
由于INS的速度误差d v和方位测量误差d A,则引起的推算点间相对误差dΔx和dΔy分别为:
![]()
3)匹配定位算法引起的误差
在地形匹配导航中,通常采用的算法是基于等值线进行匹配或者基于格网进行匹配。无论何种匹配,均是建立在实测条带地形与背景场地形最大吻合的基础上,其最佳匹配的评定指标是在遍历搜索的基础上,根据每次遍历所得的相似性指数或者深度差值的均方根序列,寻找最大的相似性或者最小均方根,与之对应的匹配即为最优匹配。
以上匹配算法基于格网或者图像实现。实际匹配中发现,测深中的定位误差将会引起如下两个误差:
(1)匹配中格网不一致导致的匹配误差。匹配是根据格网深度的一致性确定最优匹配的,若定位不准确,会导致背景场地形和实测条带地形格网的划分不一致,进而影响匹配定位精度。
(2)匹配算法误差。测深定位误差会使得与位置对应的测深值并非真实反映其位置上的实际地形,由此引起的匹配误差会引起定位误差。这是匹配算法引起的。同时由于匹配算法自身的局限性也会引起空位误差。
3.综合误差
综上,则由此引起的组合系统导航定位误差σp为:
![]()
式中,σINS-p为INS引起的点位误差,而σTM-p为匹配定位引起的点位误差。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。










