



4.3.3 超短基线声学定位系统
超短基线安装在一个收发器中,组成声基阵,声单元之间的相互位置已精确测定,且构成声基阵坐标系。声基阵坐标系与船体坐标系之间的关系要在基阵安装时精确测定,即需测定相对船体坐标系的位置偏差和声基阵的安装偏差角度(横摇角、纵摇角和水平旋转角)。系统通过测定声单元的相位差来确定换能器到目标的方位(垂直和水平角度)。换能器与目标的距离通过测定声波传播的时间,再用声速剖面修正波束线,确定距离。在以上参数的测定中,垂直角和距离的测定受声速的影响特别大,其中垂直角的测量尤为重要,直接影响定位精度。所以,多数超短基线定位系统建议在应答器中安装深度传
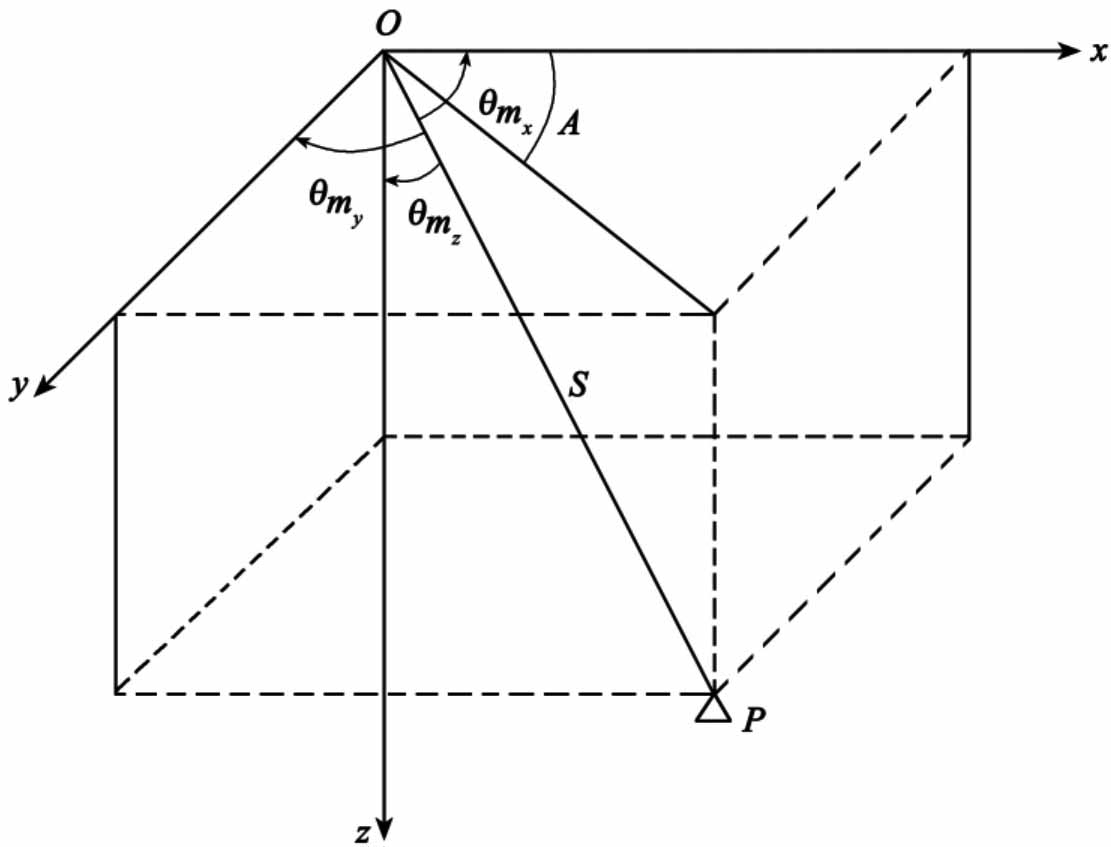
图4-9 短基线定位
感器,以提高垂直角的测量精度。
超短基线定位系统要确定目标的绝对位置,必须知道声基阵的位置、姿态以及船艏方向,这些参数可以由GPS、运动传感器MRU和电罗经提供。系统的工作方式是距离和角度测量,即方位-距离法。
超短基线系统与短基线系统的区别仅在于,船底的水听器阵,以彼此很短的距离(小于半个波长,仅几厘米),按直角等边三角形布设而装在一个很小的壳体内。以方位-距离法定位,不过式(4-13)中的bx= by= b,结合(4-14)式有:

根据式(4-15),还可求出声线方向和船艏方向之间的夹角A,
![]()
则在海平面直角坐标系中的载体位置,可根据下式确定。
![]()
式中xp、yp为应答器在海面直角坐标系中的坐标,为已知。K为船航向角,D为应答器至船台水听器基阵中心的水平距离。
短基线和超短基线声学定位系统都仅需要一个水下应答器,这较之长基线声学定位系统需布设多个应答器阵要简便得多,所受到的误差影响也小,但作用距离较短。超短基线较短基线更为突出的优点是船底水听器阵受船体动态影响小,因此定位精度更高些,而且船大船小均可使用,更为方便灵活。
下面讨论短基线和超短基线的定位误差。由式(4-13)和式(4-14)可得:

将式(4-18)微分再求方差,得:
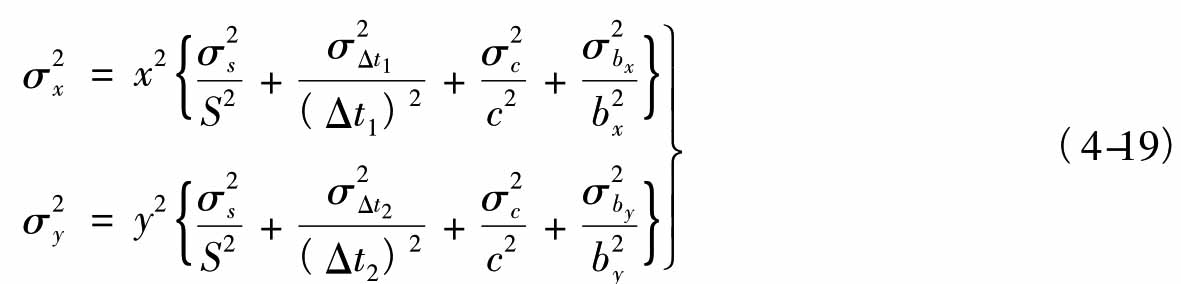
式(4-19)说明,船越接近声标上方,定位精度越高,相反,若水平位移很大,则定位精度会降低。同时,定位精度还与斜距测定误差、声速测定误差以及水听器阵接收信号的时间间隔测定误差有关。在一般情况下,短基线和超短基线水声定位精度约为水深的1%。
超短基线的优点是集成系统价格低廉、操作简便容易;因实施中只需一个集成单元,安装方便,定位精度较高。超短基线的缺点是系统安装后的校准需要非常准确,而这往往难以达到;此外,测量目标的绝对位置精度依赖于外围设备(电罗经、姿态和深度)的精度。
目前我国已经研发了水下DGPS高精度定位系统用于水下定位,该设备首次利用全球定位技术(GPS)解决水下设备导航问题和水下设备实时三维定位问题。该设备的研制成功,将传统水下定位精度从十多米提升到了亚米级,使我国成为继美、法、德之后世界上少数几个掌握水下高精度定位技术的国家之一。
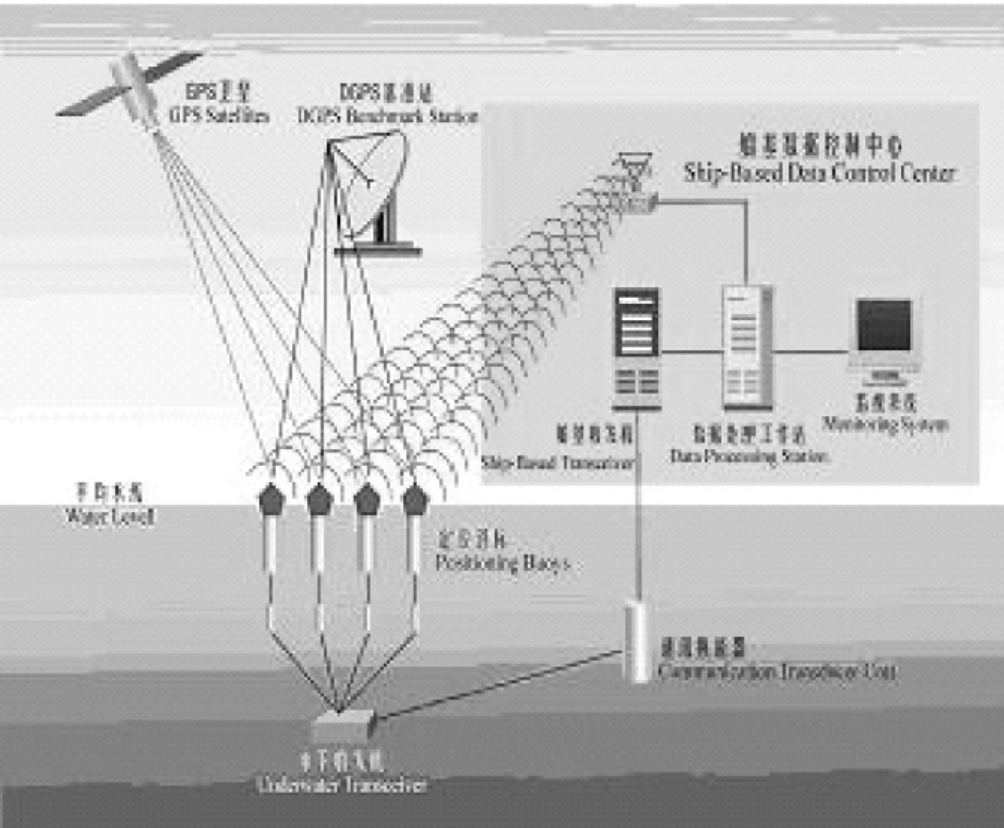
图4-10 水下DGPS定位系统
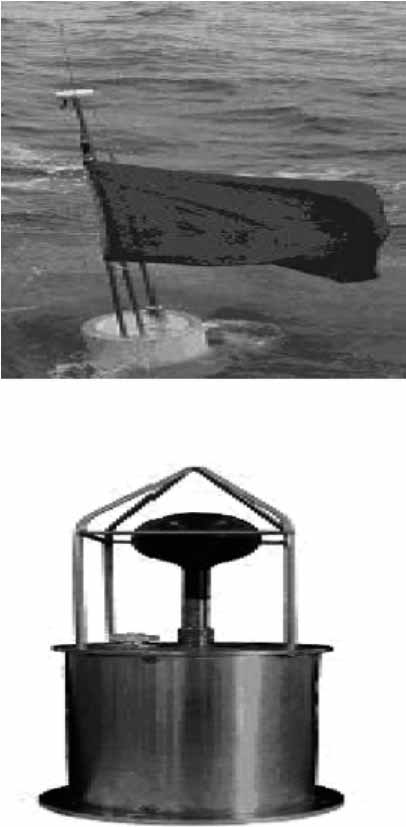
该系统静态定位精度为厘米级,动态定位精度优于2m,工作深度为100m,水声作用距离大于2000m,可实现水下目标跟踪与导航功能;其浮标连续工作时间大于6h,水下收发机连续工作时间大于24h。可用于水下目标动态跟踪或定位、水下潜航器导航定位和精密授时等。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。










