



4.3.2 短基线声学定位系统
短基线系统的水下部分仅需要一个水声应答器,而船上部分则是安置于船底部的一个水听器基阵。换能器之间的距离一般超过10m,换能器之间的相互关系精确测定,并组成声基阵坐标系。
基阵坐标系与船体坐标系间的相互关系由常规测量方法确定。
短基线声学定位系统的测量方式是由一个换能器进行发射,所有换能器进行接收,得到一个斜距观测值和不同于这个观测值的多个斜距值。系统根据基阵相对船体坐标系的固定关系,结合外部传感器观测值,如GPS确定的换能器位置、动态传感器单元MRU测量的船体姿态、罗经Gyro提供的船位,计算得到海底点的大地坐标。系统的工作方式是距离测量。短基线声学定位系统的设备框图如图4-7所示。
图4-8显示了短基线声学定位系统的单元配置。图中H1、H2和H3为水听器(接收换能器),O为换能器(同时也是船体空间直角坐标系的中心),水听器呈正交布设,Hl和H2之间的基线长度为bx,指向船艏,即x轴方向。H2和H3之间的基线长度为by,平行于指向船右的y轴,z轴指向海底。设声线与三个坐标轴之间的夹角分别为θmx,θmy和θmz,而Δt1和Δt2分别为H1和H2以及H2和H3接收的声信号的时间差(图中仅以H1和H2为例)。短基线定位的几何意义如图4-8所示。
短基线定位既可按测向方式定位,称为方位-方位法,又可按测向与测距的混合方式定位,称为方位-距离法。
1.方位-方位法
由图4-8得:
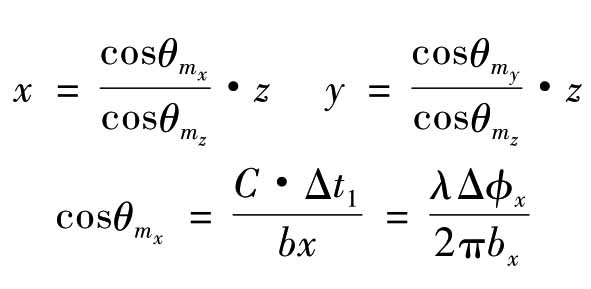
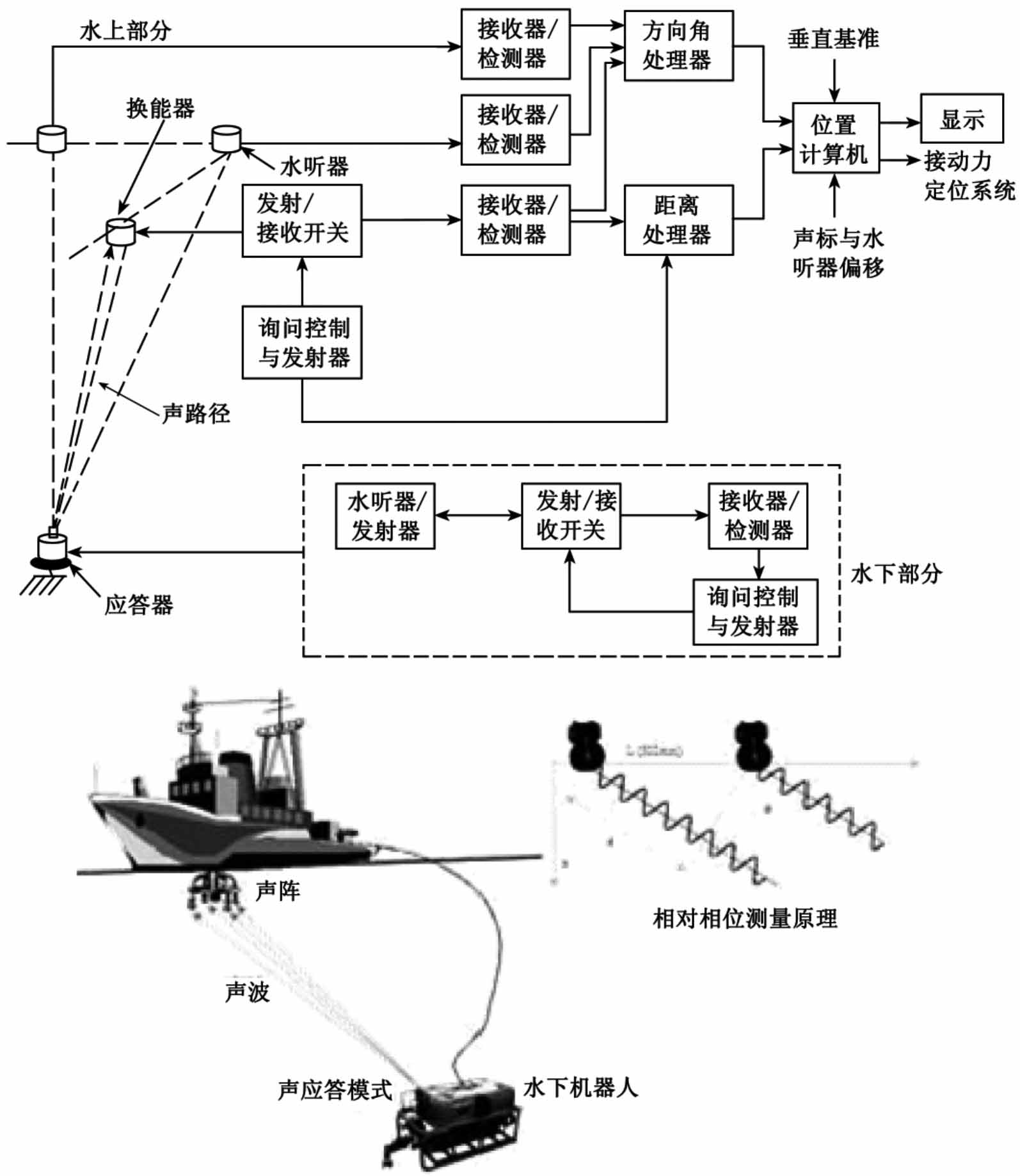
图4-7 短基线设备框图
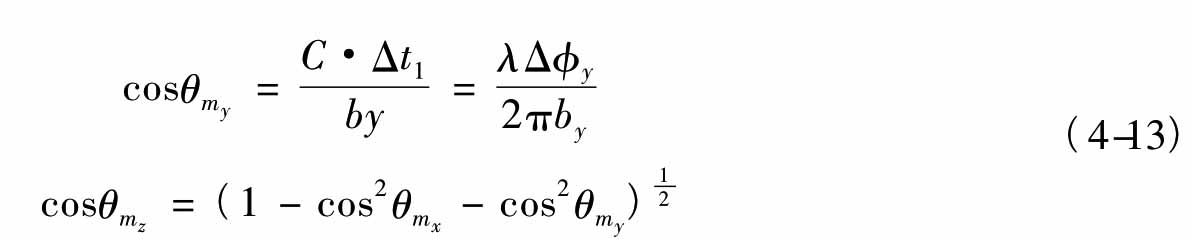
式中z为水听器阵中心与水下应答器间的垂直距离,ΔΦx与ΔΦy分别为H1和H2以及H2和H3所接收的信号之间的相位差。
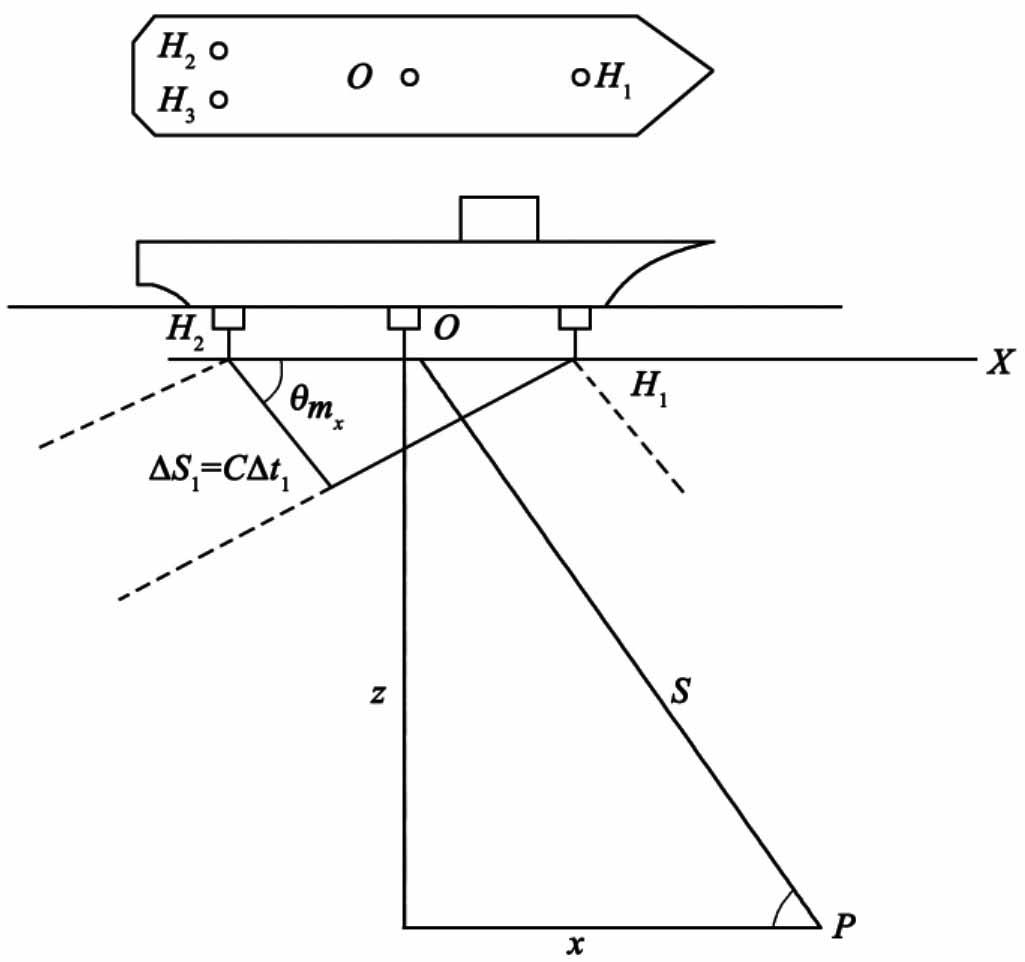
图4-8 短基线的配置
2.方位-距离法
根据空间直线OP与各个坐标系的夹角以及OP的长度,由图4-9可直接得出P点在船体坐标系中的坐标(x,y,z)。

短基线的优点是集成系统价格低廉、系统操作简单、换能器体积小,易于安装。缺点是深水测量要达到较高的精度,基线长度一般需要大于40m。此外,系统安装时,换能器需在船坞上严格校准。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。












