



4.3.1 长基线声学定位系统
长基线系统包含两部分,一部分是安装在船只上或水下机器人上的收发器/换能器(transducer)中;另一部分是一系列已知位置的固定在海底上的应答器,这些应答器之间的距离构成基线。
由于基线长度在百米到几千米之间,相对于超短基线和短基线,该系统被称为长基线系统。长基线声学定位系统是通过测量收发器和应答器之间的距离,采用测量中的前方或后方交会,对目标实施定位,所以系统与深度无关,也不必安装姿态和电罗经设备。如图4-3所示,实际工作时,既可利用一个应答器进行定位,也可同时利用二个、三个甚至更多个应答器来进行测距定位。
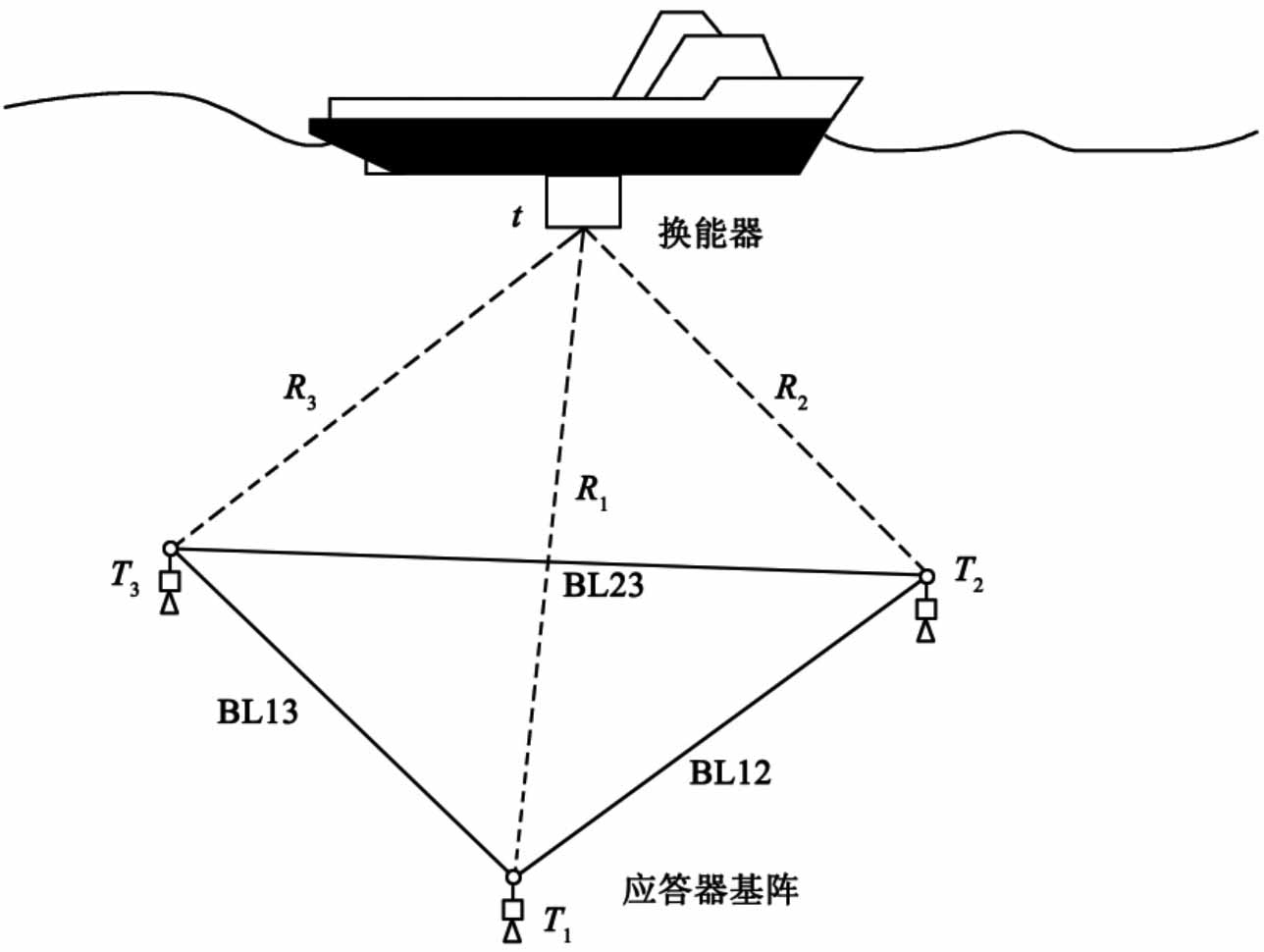
t:换能器; R1、R2和R3:测量距离; T1、T2和T3:声波应答器;BL12、BL13和BL23;基线
图4-3 长基线系统的工作原理
根据图4-3和图4-4,下面介绍采用不同数量应答器测距情况下的导航定位原理。
1.一个应答器
如图4-5所示,P(x0,y0)代表应答器; A、B、C分别代表具有航向K的航线上的三个船位; DA、DB、DC分别表示应答器到A、B、C的水平距离。
设该船的航速为v,由A到B的航行时间为tA,由B到C的航行时间为tc,于是有:
式中,
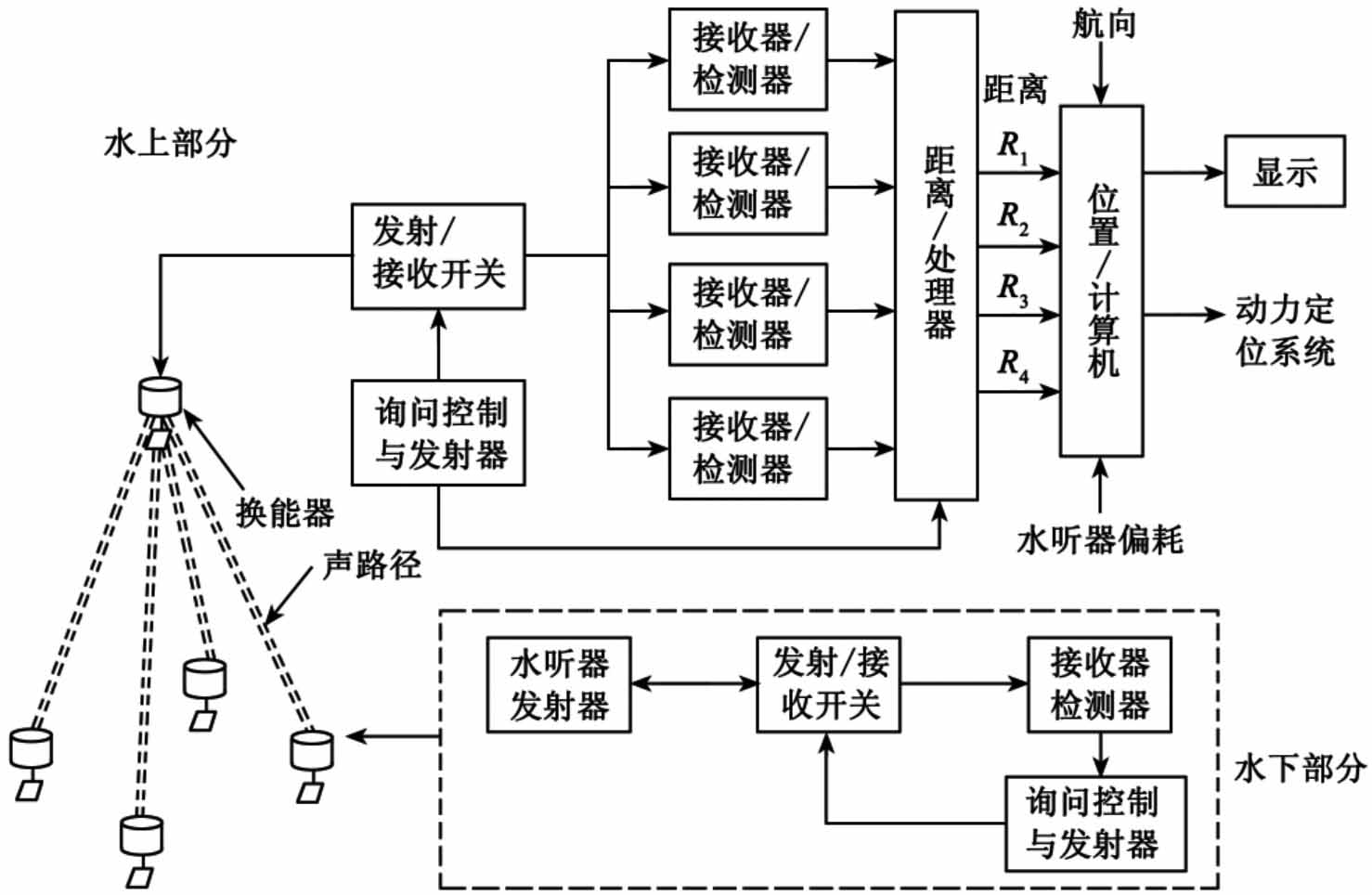
图4-4 长基线系统组成及其工作原理
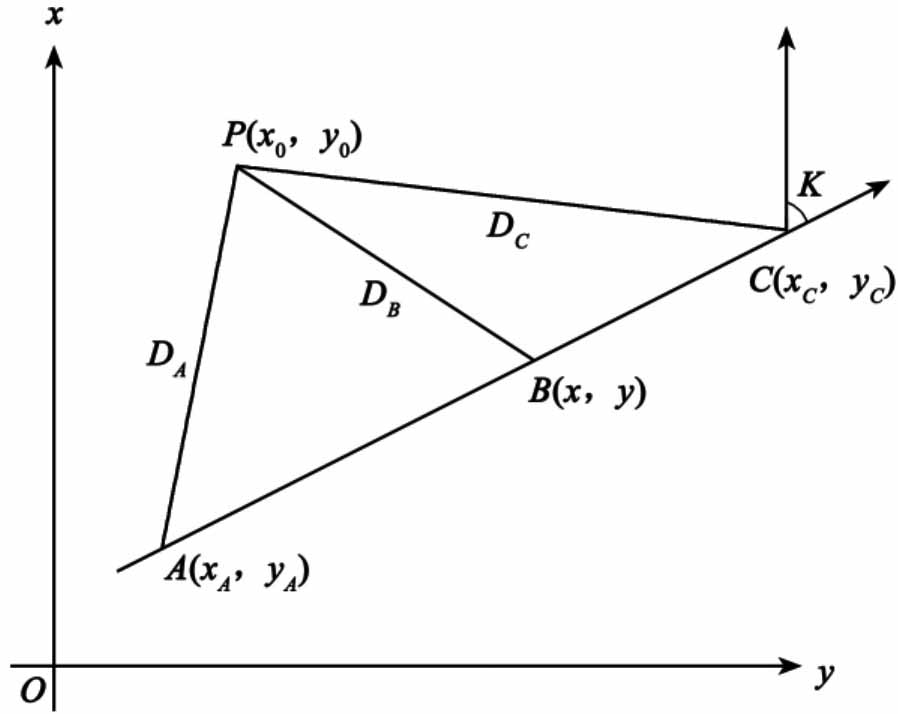
图4-5 长基线系统中单应答器定位方式
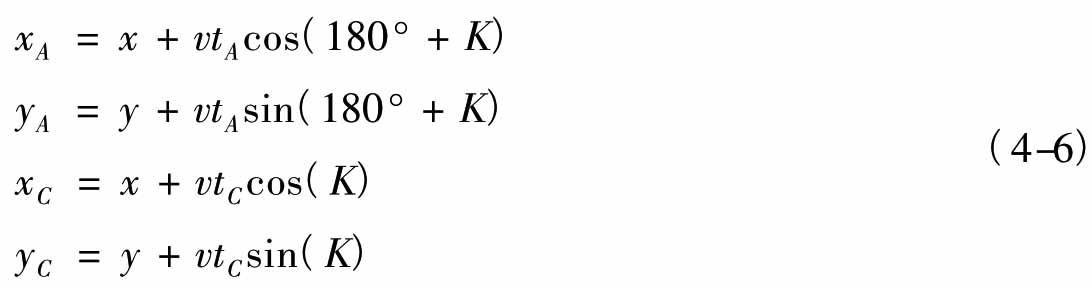
显然,v、tA、tC、K、x0,y0、DA,DB,DC均已知,未知数x、y可用最小二乘法求出。然后将x、y代入式(4-6)中求出船位A和C的坐标。这种方法是以船速、船向误差较小为前提的,一般情况下定位精度不高。
2.双应答器
如图4-6所示,P1(x1,y1)和P2(x2,y2)分别为两个声标的位置,C为船位。α12为声标基线d的方位角,Φ为声标P 1处三角形顶角,Dl、D2为船到声标的水平距离。
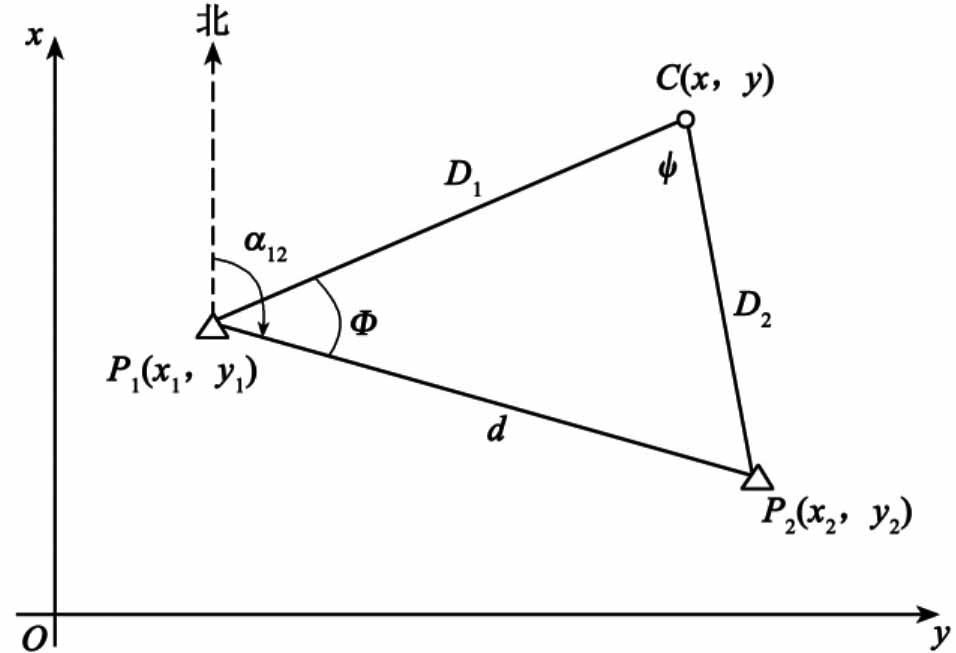
图4-6 双应答器定位方式
由图4-6知:
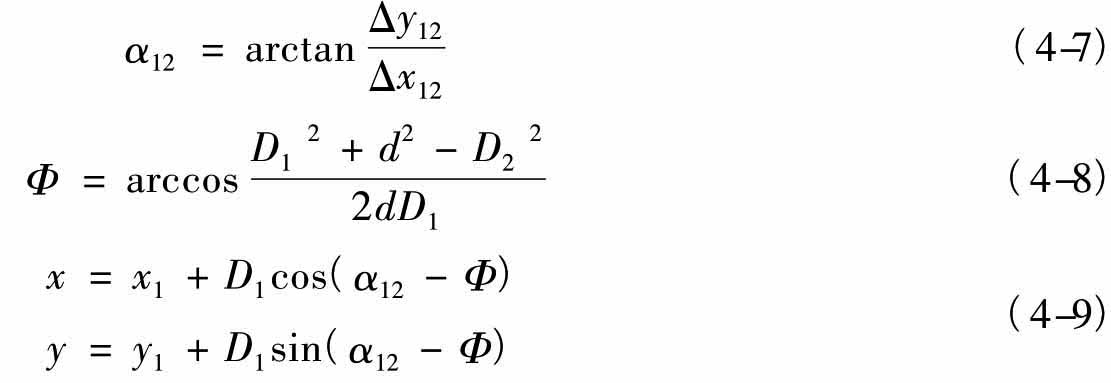
如果C在声标P1、P2连线的另一侧,则式(4-9)应为:
![]()
3.三个和三个以上应答器
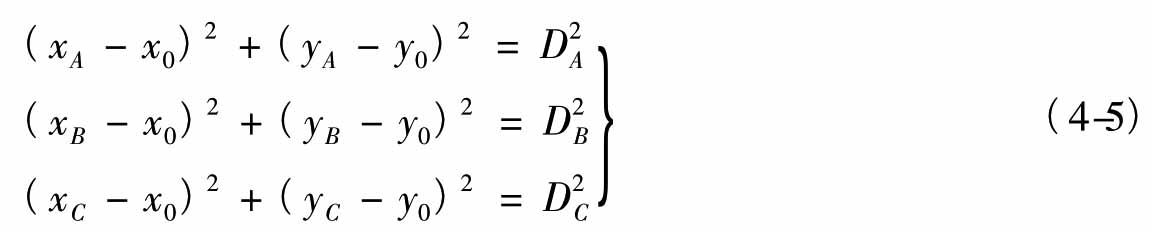
如图4-3所示,以x、y来表示测量船的平面坐标,z为测量船换能器t的吃水深度;以(xi,yi,zi),i= 1,2,3,表示已知的水下声标T的坐标,Ri(i= 1,2,3)为测量船至水下声标间的距离。以三个应答器为例,根据船到水下三个应答器的空间交会距离可得:

解式(4-11)可得:
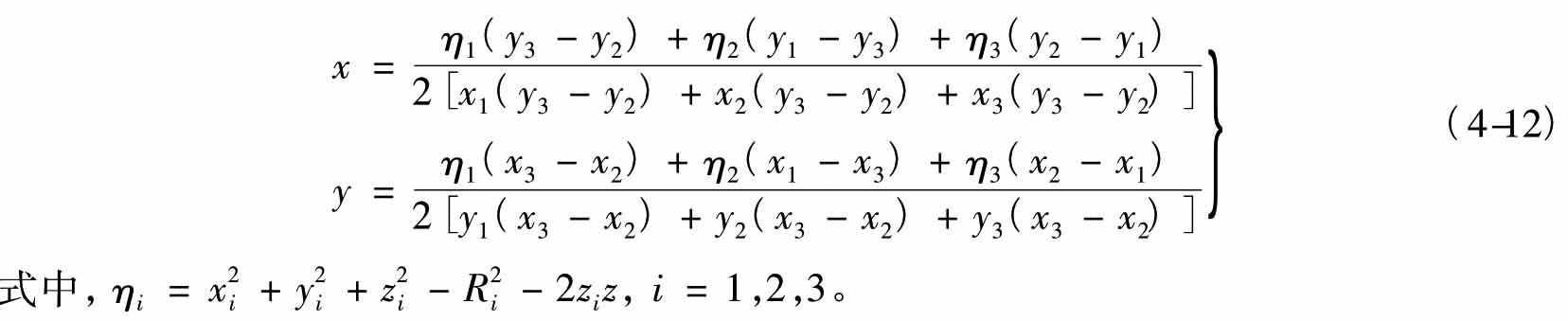
显然,对于三个和三个以上应答器情况下的导航定位,其精度取决于测距精度。
长基线系统的优点是独立于水深值。由于存在较多的多余观测值,因而可以得到非常高的相对定位精度;此外,长基线定位系统的换能器非常小,实际作业中,易于安装和拆卸。长基线系统的缺点是系统过于复杂,操作繁琐。数量巨大的声基阵的布设和回收需要较长的时间,并且还需要对这些海底声基阵进行详细校准测量。长基线定位系统的设备一般比较昂贵。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。










