



2.4.2 水声定位系统
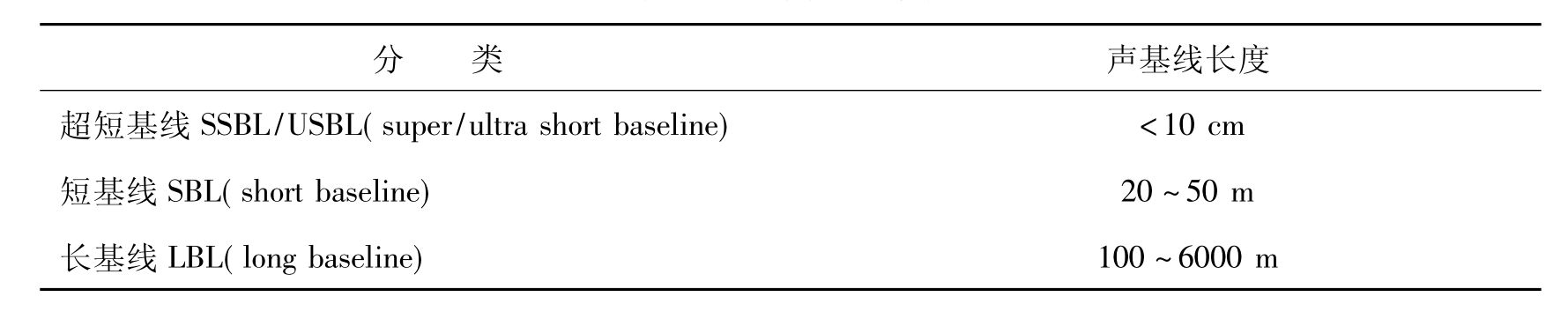
水声定位系统可采取不同的方式进行工作,这里仅介绍具有两种最基本工作方式的定位系统,即长基线定位系统和短基线定位系统。在短基线定位系统的基础上,进一步缩短水听器阵列的距离,则形成超短基线定位系统。各水声定位系统声基线的长度见表2-1。
表2-1 各水声定位系统声基线的长度
1.长基线定位系统
长基线定位系统包括安装在船上的收发器和一系列位置已知的固定在海底的应答器,应答器之间的距离构成基线。由于基线长度在百米到几千米之间,相对超短基线和短基线,该系统被称为长基线系统。长基线声学定位系统通过测量收发器和应答器之间的距离,采用测量中的前方或后方交会,对目标实施定位,所以系统与深度无关,也不必安装姿态和电罗经设备。如图2-9所示。实际工作时,既可利用一个应答器进行定位,也可同时利用二个、三个或更多个应答器来进行测距定位。
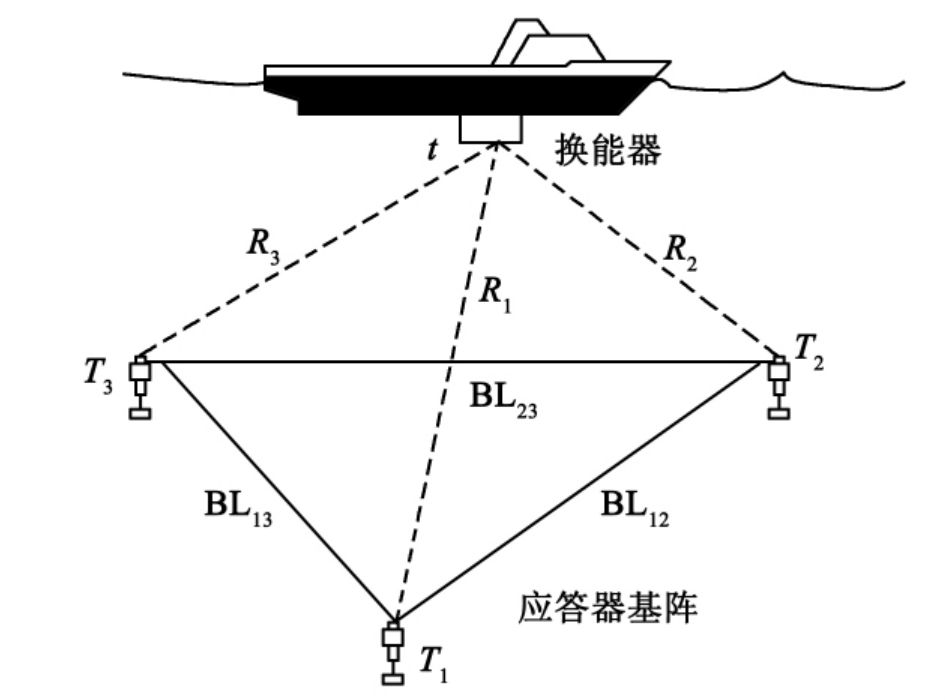
t换能器R1、R2、R3测量距离T1、T2、T3:声波应答器BL12、BL13、BL23:基线
图2-9 长基线系统的组成及其工作原理
(1)一个应答器定位
如图2-10所示,P(x0,y0)为应答器,A、B和C为具有航向K的航线上的三个船位,DA、DB,DC为应答器至A,B,C的水平距离。若航速为V,由A到B的航行时间为tA,由B到C的航行时间为tc,可得到距离公式:
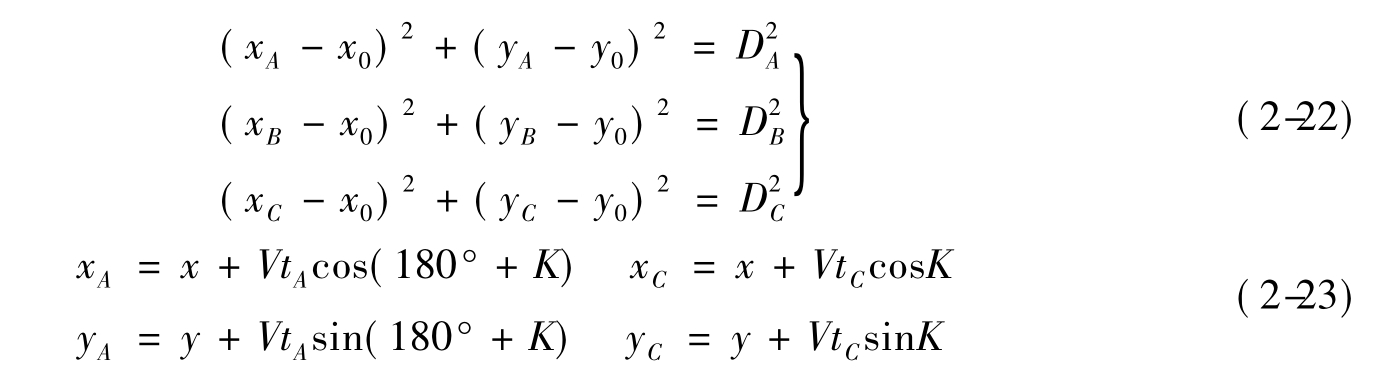
由于V、tA、tC、K、x0,y0、DA、DB、DC均为已知,于是可用最小二乘法求出船位B的坐标x、y。将x、y代入式(2-23)可求出船位A和C的坐标。
(2)双应答器定位
如图2-11所示,P1(x1,y1),P2(x2,y2)分别为两个声标的位置,C为船位。α12为声标基线d的方位角,Φ为声标P1处三角形的顶角,D1、D2为船到声标的水平距离。于是可得:

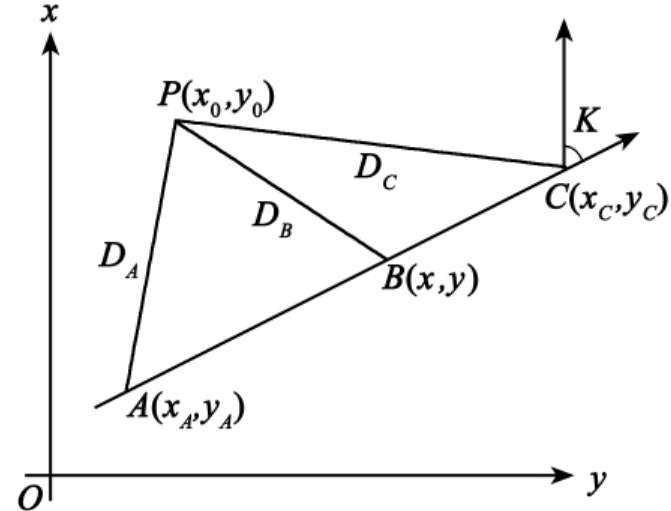
图2-10 长基线系统中单应答器定位方式
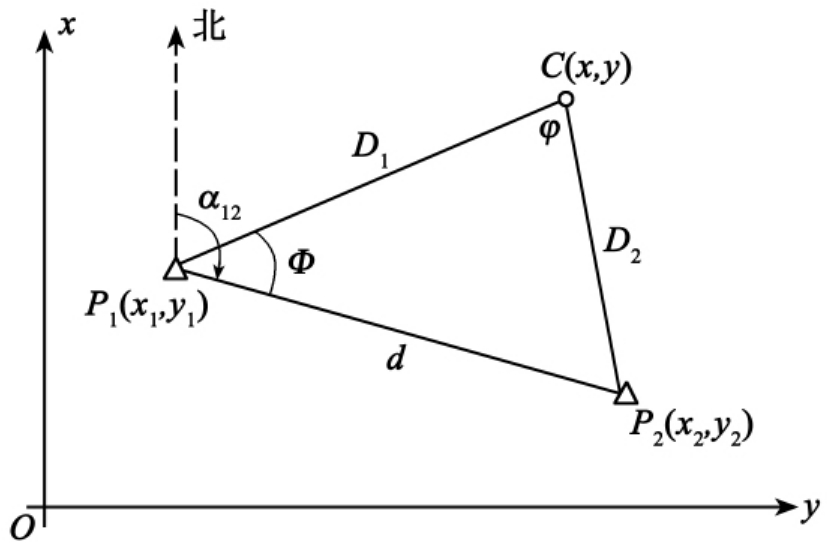
图2-11 双应答器定位方式
若C在声标P1、P2连线的另一侧,则上式应为:
![]()
(3)三个应答器的定位公式
如图2-9左边部分,以x、y来表示测量船的平面坐标,z为测量船换能器t的吃水深度;以(xi,yi,zi),i= 1,2,3,表示已知的水下声标T的坐标,Ri(i= 1,2,3)为测量船至水下声标间的距离。则由船到水下三个应答器的空间交会距离可得如下三个方程:

求解式(2-28)可得:

式中 。
。
显然它要求具有足够的测距精度且zi(i=1,2,3)为已知。
综上可知,长基线系统的优点是独立于水深值;存在较多的多余观测值,可以得到非常高的相对定位精度;其换能器非常小,实际作业中易于安装和拆卸。其缺点是系统过于复杂,操作烦琐。布设数量巨大的声基阵需要较长的布设时间和回收时间,并且需要对这些海底声基阵进行详细的校准测量。此外,长基线定位系统设备比较昂贵。
2.短基线系统
这种定位系统的水下部分仅需要一个水声应答器,而船上部分是安置于船底部的一个水听器基阵。换能器之间的距离一般超过10m,换能器之间的相互关系精确测定,并组成声基阵坐标系。基阵坐标系与船坐标系的相互关系由常规测量方法确定。短基线系统的测量方式是由一个换能器发射,所有换能器接收,得到一个斜距观测值和不同于这个观测值的多个斜距值。系统根据基阵相对船坐标系的固定关系,结合外部传感器观测值,如GPS、动态传感器单元MRU、罗经Gyro提供的船位、姿态和船艏向值,计算得到海底点的大地坐标。系统的工作方式是距离测量。
短基线系统设备组成框图如图2-12所示。
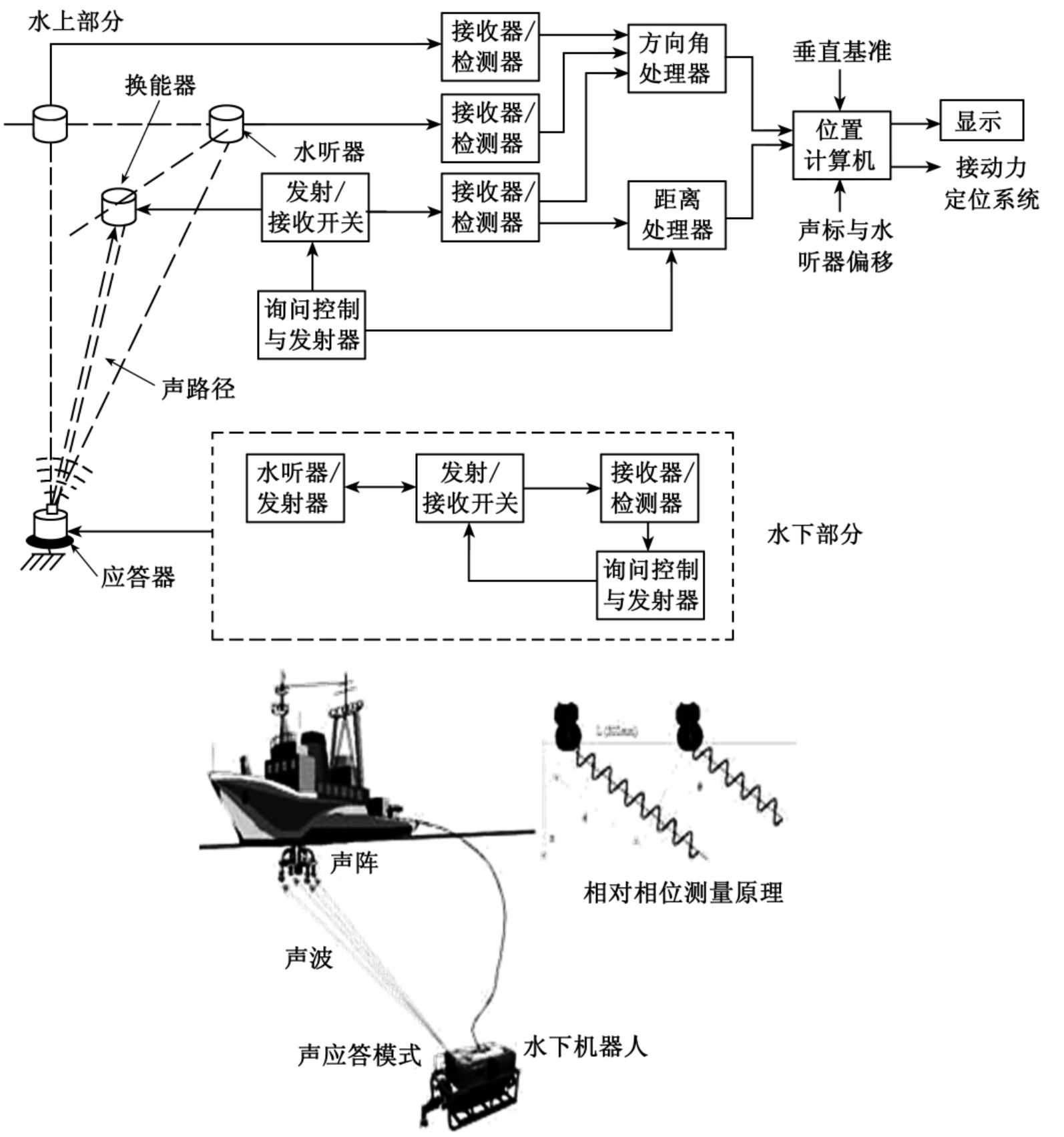
图2-12 短基线系统设备组成框图
图2-13为短基线的原理图。图2-13中H1、H2和H3为水听器,O为换能器(它也是船体空间直角坐标系的中心),水听器成正交布设,H1和H2之间的基线长度为bx,指向船首,即X轴方向。H2和H3之间的基线长度为by,平行于指向船右的Y轴,Z轴指向海底。设声线与三个坐标轴之间的夹角分别为θmx,θmy和θmz,而Δt1和Δt2分别为H1和H2以及H2和H3接收的声信号的时间差。
短基线定位既可按测向方式定位,称为方位-方位法,又可按测向-测距的混合方式定位,称为方位-距离法。下面加以简单介绍。
(1)方位-方位法
由图2-13可得出:

式中:z为水听器阵中心与水下应答器间的垂直距离;ΔΦx与ΔΦz分别为H1和H2以及H2和H3所接收的信号之间的相位差。
(2)方位-距离法
由图2-14可直接得出:

短基线系统的优点是集成系统价格低廉,系统操作简单,换能器体积小,易于安装。其缺点是深水测量要达到较高的精度,基线长度一般要大于40m;系统安装时,换能器需在船坞上严格校准。
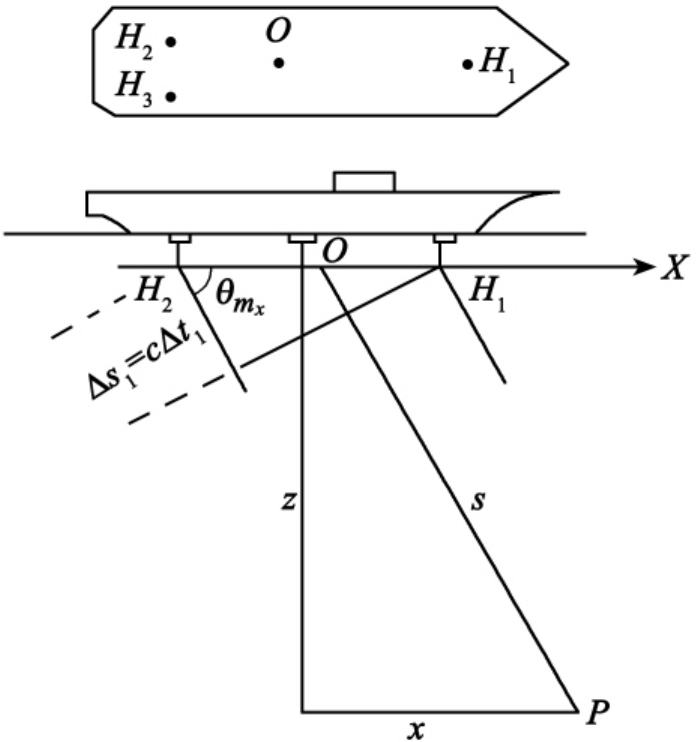
图2-13 短基线的原理图
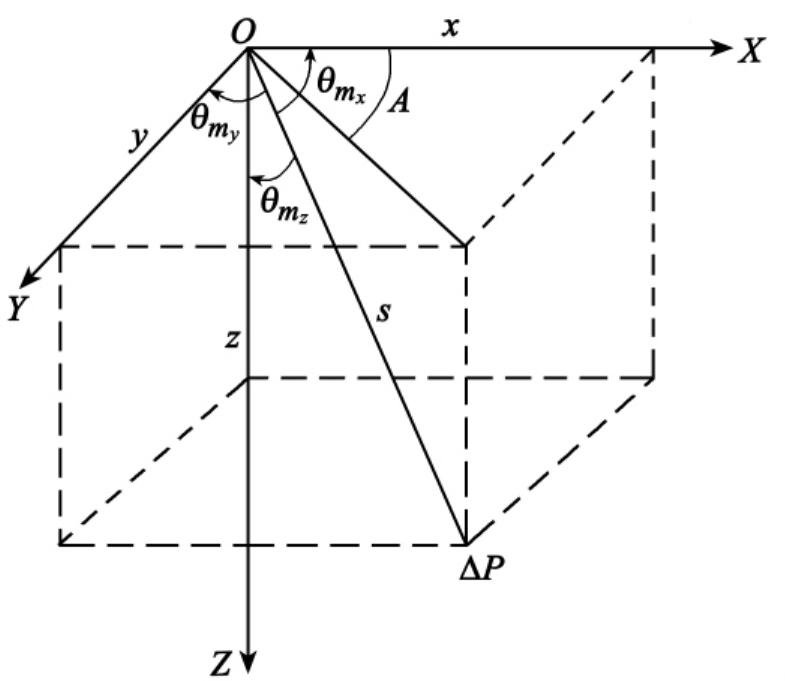
图2-14 短基线定位
3.超短基线系统
超短基线系统与短基线系统的区别仅在于:船底的水听器阵以彼此很短的距离(小于半个波长,仅几厘米),按直角等边三角形布设而装在一个很小的壳体内。超短基线定位系统要确定目标的绝对位置,必须知道声基阵的位置、姿态以及船首向,这些参数可以由GPS、运动传感器MRU和电罗经提供。系统的工作方式是距离和角度测量。
用方位-距离法定位时,式(2-30)中的bx= by,结合式(2-31)可得:
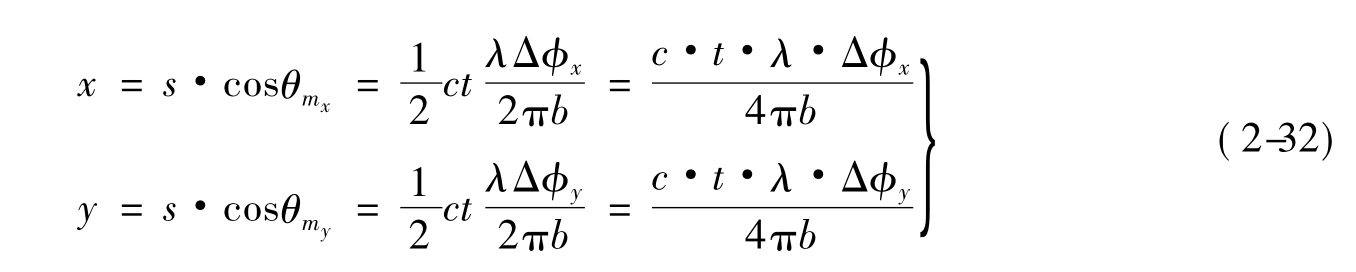
根据式(2-32)还可求出声线方向和船首方向之间的夹角A(参见图2-13):
![]()
其在海平面直角坐标系中的船位,可按下式求出:
x= xp-D cos(A+ K),y= yp-D sin(A+ K) (2-34)
式中:xp、yp为应答器在海面直角坐标系中的坐标,其值为已知;K为船航向角,D为应答器至船台水听器基阵中心的水平距离。
由于短基线、超短基线都仅需一个水下应答器,故较之长基线需布设应答器阵要简便得多,所受到的误差影响也要少。超短基线较之短基线更为突出的优点是船底水听器阵受船体动态影响小,因此定位精度更高些,而且船大船小均可使用,方便灵活。下面对短基线和超短基线的定位误差加以讨论。由式(2-30)和式(2-31)可得:
![]()
将上式微分再求方差,得
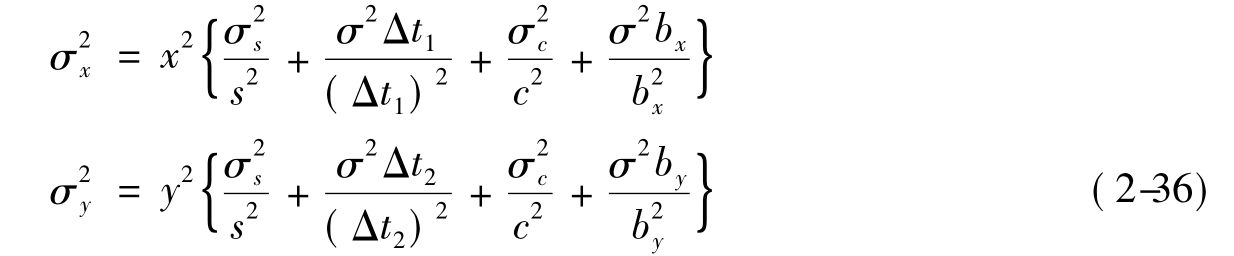
式(2-36)说明,船越接近声标上方,定位精度越高;反之,若水平位移很大,则定位精度降低。同时,定位精度还与斜距测定误差、声速测定误差以及水听器阵接收信号的时间间隔测定误差有关。一般情况下,短基线和超短基线水声定位精度约为水深的1%。
超短基线的优点是集成系统价格低廉,操作简便,安装方便,且定位精度较高。其缺点是系统安装后的校准需要非常准确,这往往难以达到。此外,测量目标的绝对位置精度要依赖于外围设备(电罗经、姿态和深度)的精度。
4.GAPS全球声学定位惯性导航系统
(1)GAPS系统及其特点
GAPS是一套无须标定的便携式、即插即用超短基线声学定位(USBL)惯性导航系统,它将高精度光纤陀螺惯性导航技术与水下声学定位完美地结合在一起,并融入了GPS测量技术。系统可以同时追踪多个水下目标,这使得多用途的GAPS能最大限度地满足海面和水下定位及导航的要求。
传统的USBL系统由于涉及的外部传感器多(如罗经、运动传感器、声学换能器等),在系统工作之前,各传感器之间的相对偏移量需要精确地予以测量,系统还需要进行海上标定。即使如此,各传感器之间的安装误差、测量误差也会传导给定位计算,从而影响系统的总精度。此外,各种传感器之间的连接有时会产生接口数据交换兼容性问题,给系统的稳定性带来影响。传统的USBL一旦安装和标定完毕,各传感器之间的位置就不能变动。若有一个传感器的位置发生了变化,则整个系统必须重新标定才能使用。因此,传统的USBL系统不能即插即用。传统的USBL定位还受声程及GPS刷新率的限制,定位数据的密度比较稀疏,目标的轨迹分辨率较差。
与传统USBL相比,GAPS内设置一个高精度的光纤陀螺惯性导航系统,母船的方位、纵摇、横摇、升沉等姿态数据均由一体化的GAPS提供,各传感器之间的相对偏移量在出厂前已进行内部标定并固化在系统的内部程序中,因此,系统在现场无须进行标定,不存在各传感器之间的安装误差及测量误差问题,确保了系统的高精度导航定位。此外,由于GAPS的所有传感器均由IXSEA公司自行开发生产,各传感器之间连接不存在兼容性问题,系统稳定性得到了保证。在换能器安装方面,由于GAPS内部有一套PH INS惯性导航系统,换能器的方位、姿态等数据均可以以高刷新速率输出,无论GAPS的换能器姿态如何,系统均能解算出高精度的水下目标位置,因此,GAPS的换能器安装非常简单——既可以用绳索悬吊于水中,也可以采用法兰盘刚性地安装于船舷。若刚性安装架的结构稳定,GAPS还可以当做母船的罗经运动传感器,提供母船的方位、纵/横摇以及升沉数据。
(2)GAPS的系统组成
GAPS由声学换能器阵、控制和显示单元、连接电缆和水下信标组成。GAPS声学换能器阵内置高精度PHINS惯性导航单元、GPS接收机(WAAS/ENGOS兼容),控制和显示单元带图形显示及系统软件的PC计算机。
(3)GAPS的安装
索悬吊:用绳索将GAPS声学换能器阵悬吊于船舷。
船舷刚性安装:用法兰盘将GAPS换能器刚性地安装于船舷,使用时将换能器放入水中。
安装条件及要求:GAPS要求船体周围环境噪声小于65dB,海况为3~5级;收发器吃水不小于4m;建议船速为4kn,最大为10kn。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。










