



【摘要】:在三轴平台系统中,各环路都处于中立位置,且轴相互垂直,各自的稳定回路相互独立。当载体存在三个方向的姿态变化时,如横摇、纵摇以及偏航,三个环的轴不再独立,伺服回路相互耦合。若三轴平台纵向安装,坐标系Oxp yp zp(p系)、Oxa ya za(a系)、Oxr yr zr(r系)、Oxb yb zb(b系)分别代表方位环、俯仰环、横滚环和基座(载体)。通常,m系不是正交系,由m系到p系的转换矩阵为:
3.2.3 三轴平台伺服回路的耦合与隔离
在三轴平台系统中,各环路都处于中立位置,且轴相互垂直,各自的稳定回路相互独立。当载体存在三个方向的姿态变化时,如横摇、纵摇以及偏航,三个环的轴不再独立,伺服回路相互耦合。
若三轴平台纵向安装,坐标系Oxp yp zp(p系)、Oxa ya za(a系)、Oxr yr zr(r系)、Oxb yb zb(b系)分别代表方位环、俯仰环、横滚环和基座(载体)。平台处于中立位置时,各坐标系重合。当各环绕本身的轴分别转动一个角度θr,θa,θp时,坐标系间关系可用图3-3表示。
由于沿Oxr,Oya,Ozp轴各安装有力矩电机,故将Oxr ya zp称为力矩电机坐标系,记为Oxm ym zm(m系)。通常,m系不是正交系,由m系到p系的转换矩阵为:

由于力矩电机坐标系不正交,使伺服回路之间产生耦合。为克服这种耦合作用,须对陀螺输出信号 进行变换,使:
进行变换,使:
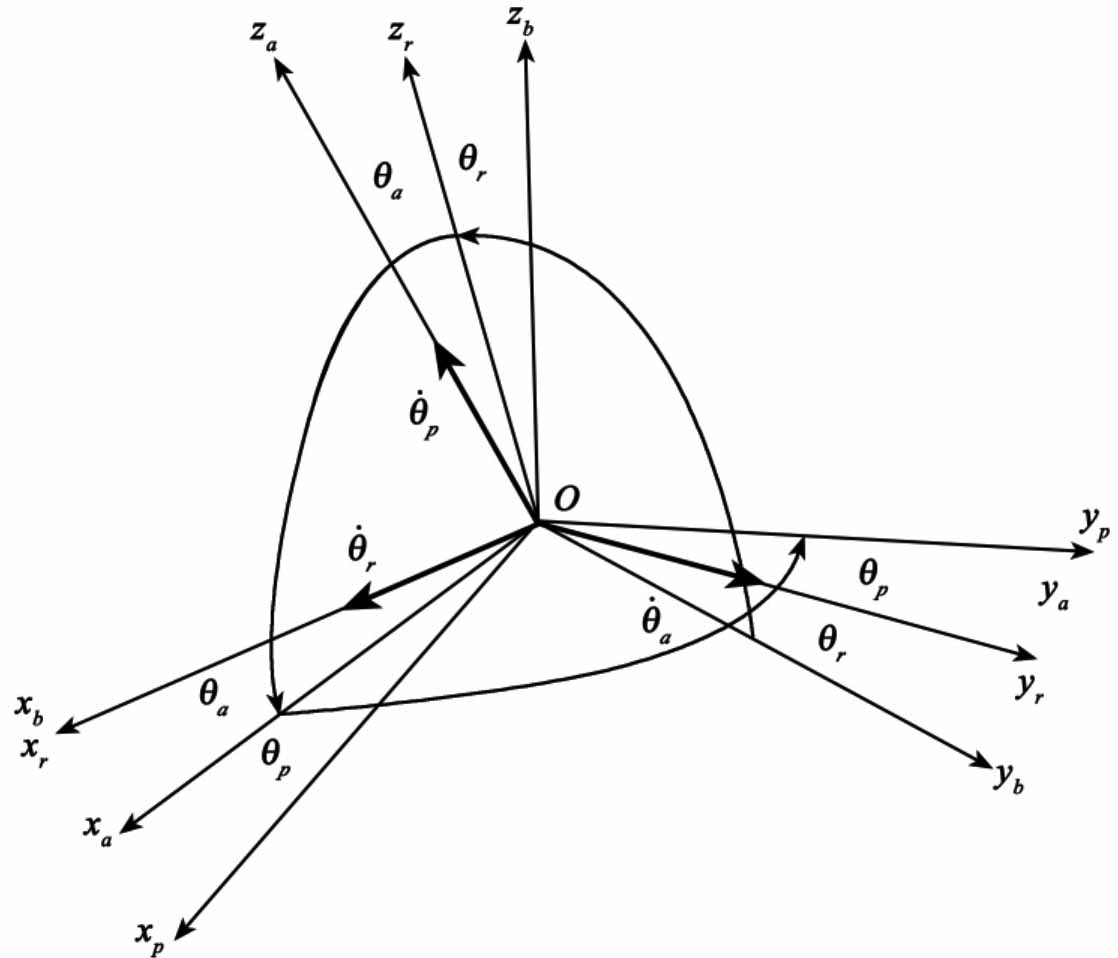
图3-3 坐标系间的关系
![]()
设平台各环伺服回路开环传递函数分别为Wr(s)、Wa(s)、Wp(s),则有:

即系统实现了解耦。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。










