



主飞行显示器及其航路引导:工作负荷,性能和情景意识
Christopher D.Wickens,Amy L.Alexander,Thomas J.Hardy
伊利诺伊大学航空学院,航空人为因素研究所
42名具有仪表等级的飞行员,通过高逼真通用航空飞行模拟器完成两个试验,使用“空中公路”(隧道)显示飞行一系列多航曲线的阶梯下降进近飞跃多山地带。两个试验都研究了隧道属性如何影响飞行路线跟踪表现,交通意识,地形意识和工作负荷(通过主观的和次要任务表现的测量)。
试验1在目视飞行气象条件(VMC)下模拟飞行,将高、低强度隧道与一个较少受混杂干扰的“引导飞机”(follow-me-airplaneFMA)相比较。结果表明,与FMA相比,两种隧道能更好地支持飞行航路跟踪,因为有更多可用的预观信息。增加隧道强度,虽然减少主观工作负荷,但对航迹跟踪没有好处,而且会降低交通探测表现。在试验2中,主要是在仪表气象条件下飞行,低强度的隧道飞行用一个大的(10“×8”)和小的(8“×6.5”)显示器,显示出或30度或60度的几何视野(GFOV)。飞行航路跟踪表现的多数测量青睐小些的显示器,特别是60度GFOV,显示一个较小的隧道和范围更广的地形描述。越大的GFOV越能更好地保持地形意识,并产生较小的次要任务工作负荷评估。在这两个试验中,最后着陆进近都因跑道障碍而终止,而隧道引导飞行员复飞。在几乎所有情况下,飞行员都没有注意到存于复飞航路上的空中危险,这个危险只在窗外才可以看到。
1 导言
1.1 背景
对未来飞机提议的显示系统采用许多与平视显示器(HUD),3D显示器,计算机生成图像(CGI),传感器图像和卫星导航相关联的新技术(Scott,2001年Comstock,Glabb,Prinzel,&Elliot,2001;Stark,Comstock,Prinzel,Burdette&Scerbo,2001;Glaab &Takallu,2002;Prinzel,Kramer,Comstock,Bailey,Hughes,&Parrish,2002,Wickens,2003年,Prinzel,2002)。这些系统设计的目的是提高安全性,降低可控飞行撞地(CFIT),跑道侵入以及空中相撞事故和遭遇恶劣天气的威胁,同时通过增强低能见度下起飞和着陆能力提高“生产率”。
这类系统与若干要素相关物质的和观念的几部分。系统的深入分析可以将关键要素描绘为:(1)显示位置(平视、低头的PFD,和低头的NAV显示);(2)信息来源(飞行路线,交通,天气,地形,系统状态,通讯);(3)描述显示的特定格式和参数(例如,2D,3D,高低逼真度,保形—非保形,大—小);(4)运行条件(例如,白天,夜间,能见度高,能见度低,着陆,起飞);(5)处理若干先进显示特征的驾驶员信息处理机制(位置估计,控制,注意力和任务切换);(6)预计使用这类先进显示系统的任务(例如,引导,领航,地形意识);(7)显示系统支撑的有效性测量(MOE)(或因显示系统特征的变化而发生的改变),不仅包括表现(导航,应急反应),也包括飞行员的主观心理负荷和情景意识。
我们将这些因素间复杂的交互影响用图1和图2描述。图1介绍了飞行员纯粹的信息处理模型,可在任何先进的显示组件环境中运作,因此包括航空工作站,其中可能包含一些但不必是先进航空显示系统相关的所有功能。图形描绘了飞行员“施展”或运用以下技能:(1)注意力分配——知道在适当的时候选择哪条目视航路,并且知道如何在适当的时候在任务间之切换注意力(任务管理);(2)估计——也就是了解飞机的现状,关于地形,能源状况,以及系统状态;(3)控制——这是对推力、飞机横向和纵向行为提供适当的控制,以实现安全和有效飞行的目标(我们不区分控制是直接的驾驶杆和油门操纵,还是通过MCP设置的间接操纵)。
总体来说,这个图形显示了先进的显示技术如何影响技能,因为他们产生MOE如下:情景意识的体验,其准确性依赖于注意力使用和估计的准确性(Endsley,1995年;Wickens,2000年),心理负荷所有4个处理特征决定心理负荷的强度,以及飞行员的表现测度。后者主要是根据操纵输出进行估计(当然操纵输出取决于注意力和估计)。常规表现可以区分为,是正确的还是错误的,若是前者,它是高效的还是低效的。我们最后在该图的底部标明有意想不到的表现——对突发意外事件的响应,如风切变,尾流湍流,跑道入侵或飞机故障,这比日常表现在更大程度上取决于准确的情景意识(Wickens,2000)。

图1 驾驶员信息处理模型
图2单独描述了这些先进显示系统更具体的一些要素,因为这些因素影响各种运行条件和任务下的有效性的测量(MOE),这种影响以飞行员表现的3个关键因素(注意,估计,控制)为媒介。横跨图的上方是我们整合信息的位置(包括挡风玻璃内的显示及外界情况),以及信息的实际来源。左侧我们列出不同的运行条件,这可能同时影响不同来源数据的显示(例如外界情况在仪表气象条件可能不可见),和这些不同来源数据的相对重要性(Wickens,Xu,Helleberg,&Marsh,2001)。在右列中,我们列出了不同时间要求飞行员执行的各项任务。在左下方提出了一系列关键的既表明信息来源又影响MOE的设计参数或特征,以图1中部显示的飞行员信息处理机制为媒介。最后在右下角显示,MOE可能产生更具体的问题,反映如果有可能需要避免的设计。Possible.这些问题以及预测这些问题的模型验证将是提议研究的重点,因为它们涉及主飞行显示的具体特征。它们涉及显示要素的混乱和模糊性,情景意识的遗失(LSA可依次与Endsley(1995年)的三个阶段相联系——未注意,不理解,以及未能预测),以及脱落或忽略任务和不适当的控制策略(操纵过量引起驾驶员诱发振荡或控制不足引起偏差),还有过重的工作负荷等。

图2 先进航空电子显示系统和使用的要素
在其他研究中,我们提出了飞行员信息处理模型,尝试涵盖这些设计参数对驾驶员MOE的影响(例如,HUD:Wickens,1997年;Wickens &Long,1995;3D显示和显示混杂:Wickens,2000年b;Kroft &Wickens,2001;显示尺寸:Kroft &Wickens,2001;视野:Wickens &Prevett,1995)。在目前的研究中,我们限制于先进主飞行显示构想的3个重要特征:3D航路信息(混杂信号),视野及其显示尺寸,因为这些参数影响以图1,图2所示信息处理机制为媒介。
表1给出了一个预测主飞行显示器(PFD)特征的一些关键参数变化的复杂影响的框架,这将是提议研究的重点。我们在这里将关键特征等同为3D飞行引导系统(指令输入—预观,以及预测的飞机状态——预测),覆盖3D地形显示,出现在不同大小的显示窗口内并有可调范围的几何视野(GFOV)(图3)。更详细些,表1的左下侧,我们考虑了作为提供预观引导的一种方式单独的引导飞机”(FMA;Beringer,2000)与更频繁研究的隧道或航路的区别(Beringer &Ball,2001;Williams,2000;Doherty &Wickens,2001;Fadden,Ververs,&Wickens,2001)。我们还考虑了航路的另一形式(弱照明),目的在于降低混杂程度。我们也考虑了空间显示的3个交互影响特性:其GFOV真实尺寸(Comstock et al.,2001;Stark et al.,2001),以及显示上呈现的额外信息量。
在整个表格上方,我们描述6个有重要影响的认知变量,我们预测这些认知变量将在各种MOE中反映出来,并打算在部分任务模拟中进行评估。由于先进显示系统适应飞行员表现的复杂性,这之间存在着交互影响。也就是说,一个给定的变量可能会影响不止一个认知变量,一个给定的认知变量可能受多个显示系统变量的影响。这些影响很重要,研究的重点。
表1 显示变量对飞行员信息处理要素的影响

(1)注意力隧道;
(2)根据视觉距离和GFOV会扭曲位置差错。
图3说明不同的显示尺寸和几何视角(GFOV)。左上角显示的FOV与尺寸组合给出了最大的放大程度,右下角示出“缩小”或“压缩”的最大程度。这些压缩因子可以被定义为显示增益的倒数或地图比例尺,由“像素/米”数,或视角显示与视角范围(VAD/VAR)比例限定。这一比值几乎永远小于1,恰好与地图比例尺类似。
请注意,在左下角的组合是一种特殊情况,产生的增益值为1.0。

图3 不同显示尺寸和几何视角的说明
(1)感知紧迫性。感知偏差的大小(或偏离目标飞行路线的增加率)会影响“紧急性”感受,飞行员会根据这一情况感知纠正的必要性,因而影响纠正动作的快速性(Boeckman&Wickens,2001年,Doherty &Wickens,2001;Onstott,1976年)(或对那些使偏差增加的自动化系统故障的关注程度,)。例如我们在3D显示器观察到当偏差与视线平行时(显示出微小变化)人们会感觉比较小,因此不急需纠正,这是相比那些与视线正交的显示偏差而言(这类偏差在显示上表现为大的变化;Haskell &Wickens,1993;Wickens,Liang,Prevett,&Olmos,1996)。我们假设,如果未来的指令位置(预观)通过FMA显示,实质上是一个偏差“点源”,那么这一点的偏离将会被感觉可更紧迫,与未来指令位置体现在航路显示框中心相比,对更大的紧迫性将引起更加的纠正差错动作,较小的偏差并伴随工作负荷的增加(Yeh &Wickens,1988年;Vidulich&Wickens,1986)。这的确是比较两种飞行引导模式得出的最新观察结果模式(Beringer,2000)。但是,应该指出的是引起闭环控制更高增益的较大紧迫性,能够产生更大的不稳定性(Wickens,1986)。
我们还预测,这两个观察参数的影响将同样反映:通过将较大的空间压缩到一个较小的显示空间(即缩小尺寸)引起的GFOV增加,将减少偏差的感知大小(和因此的迫切性)和正的差错趋势,同时引起飞行控制误差增加,操纵活动减少和经验的(报告的)工作负荷降低。这一预测与近期飞行模拟的结果相一致(Stark et al.,2001),结果与大的GFOV相关,发现横向偏差增加(在一个飞行航段)而总工作负荷减少。Beringer及Ball(2001年)也公布了对主观评价的相似影响,并验证了较大GFOV对减少操纵活动的影响。
最后,我们预测增加显示的大小可能会产生相应的效果。更大的显示——更多的显示“像素”表示给定的空域偏差(米),将增加感知量和采取减少偏差行动的紧迫性。然而,有趣的是Stark et al.得到显示尺寸影响的反向预测(2001年)。由于显示尺寸和GFOV在我们下面报告的试验(2)中是一同变化的,如图3所示。它们可以对显示压缩,或纠正这些差错的紧迫性产生累积影响,这显示在图3的左上角(最小压缩)和右下角(最大压缩)。不过,也有可能是横跨显示增益值的范围,以?/m或视角显示/视角范围(vad/vaw)形式表达,飞行员可以充分进行弥补,以增加或减少其增益,分别对应减少或增加显示增益。飞行员通常在一个增益范围表现出这种能力(Wickens,1986)。Beringer和Ball未能发现尺寸“压缩”的不同对飞行航迹跟踪的影响,一个与Ververs和Wickens(1998年)的发现相一致的结果。
(2)情景意识:锁眼效应(Keyholing)。表1接下来的3栏涉及到情景意识的各方面情况,其分类是依据Endsley(1995)的3阶段分类法。“Keyholing”(Woods,1984年)是指由于中心特征的强烈吸引或注意力集中,缺乏对显示边缘变化的意识(或其他元素)。在其他研究中,我们注意到浸入式或以自我为中心视野的航路显示,往往诱发忽视其他目视(但更边缘)显示的keyholing效应(Olmos,Wickens,&Chudy,2000;Wickens,Thomas,&Young,2000)。但是最近的降落航路与平视显示的ILS降落引导相比较,还表明ILS显示如FMA,“点跟踪任务”——引起更多的注意隧道,而不是航路显示;ILS导致更快地探测显示中心的空中交通,但对周边交通却有更多的疏忽。因此,我们预期相比航路显示有更多的FMA隧道(请注意,可能很难区分FMA诱导的空间隧道增加和FMA更大的紧迫性引起的资源需求增加之间的影响。这两种影响在周围目标探测中的表现相类似)。
如表1的第四行所示,预测GFOV增加有keyhole效应减少的反向效果,由于更多的外部世界呈现在显示屏上。在最近的飞行模拟中观测到这种效应影响评定的情景意识(Stark et al.,2001年)并因GFOV不同而影响交通探测(Beringer &Ball,2001年)。需要注意的是,减小GFOV而“隐藏”PFD上的外围元素(如交通标志)仍可诱导我们标为keyholing的现象,由于飞行员不太可能去看其他可能显示该元素的来源。在我们的模拟中,要观测的交通总是在每个GFOV内提供,以免人为地妨碍小GFOV的使用。
(3)情景意识:估计。在这里,我们指的是飞行员能够准确估计事物在周围空域中的位置((Endsley的第2SA阶段)和将会在什么位置(第3SA阶段)的能力。这里特别是指交通、地形和天气的真方位和相对高度。也就是说,它尤其是指飞行员能够怎样准确地指出目标飞机或地形特征(或转向以避免与这类目标间隔的丧失),或者飞行员能够怎样准确地估算出飞机前方上坡地形的斜度。通过我们试验室及其他地方的研究(见Wickens,2000c;Boeckman&Wickens,2001年总结)我们已经记录了起于3D地形显示的结果估计偏向。然而,McGreevy和Ellis(1986)特别指出GFOV对这些失真的影响,特别是大的缩小环境视觉表示的GFOV。要素偏离前方视线(和飞行路线)的距离越远(例如,交通冲突的飞机从侧面而来),估计误差就会越大。我们已经观察到这些影响,在使用浸入式航路显示的飞机进近/着陆模拟中,涉及地形估计。在表的第5行,我们注意到,改变3D显示的物理尺寸也可能产生估计位置的失真,取决于观察距离和显示的GFOV(Wickens,Todd,&Seidler,1989)。图3还表明了另一个影响估计的可能性。在图中,显示面板的左下角显示出VAD/VAW=1.0,也就是不存在任何失真,平视显示保形投影图像的典型视野。很可能这一特征将产生相对位置的最准确估计。
(4)情景意识:注意力过滤。在上面(2)(keyholing)中,我们定义丧情景意识的第1阶段是未注意要素(尤其是动态变化),这些要素在人们关注的焦点之外。在这里,我们将这种丧失定义为未感知(或感知很差)事件和影像的结果,这是由于显示过度混杂而变得模糊,甚至这些事件可能已经接近中央凹视觉。例如在这里我们注意到,飞行员用相对混杂的航空显示探测交通航向和高度变化的表现较差(Podczerwinski,Wickens,&Alexander,2001年),飞行员通过这种显示搜寻有关信息困难(Kroft &Wickens,2001),以及混杂的HUD干扰搜索显示上和远距离信息,特别是如果这些信息是出乎意料的(Fadden,Ververs,&Wickens,2001;Hofer,Braune,Bouceck,&Pfaff,2000;Wickens &Long,1995;Ververs &Wickens,1998)。
我们预计FMA上越少的标志信息,引起视野的越少混杂,其后果是将减少所需的注意力过滤,从而提高远域交通探测能力;相比之下航路显示则有更多标志和线条。然而,在先前的显示混杂研究的基础上(Yeh &Wickens,2001;Podczerwinski et al.,2001;Ververs&Wickens,1998),我们认为航路可以在低照度下显示,这样可以实现引导的好处(转弯过程,见下面(5)),同时消除或减少混杂代价。
由于当素材密度更大时,注意力过滤的挑战也越大,我们也预测,在相同的物理视角空间引入更多地形资料的GFOV增加,会增加混杂的负面影响,可能抵消“keyhole减少”的正面效益。显示屏尺寸减少还可能增加注意力过滤的代价,正如Kroft and Wickens直接观察到的(2001年,2003年)。最后,设计人员通过增加其他飞行仪表的描绘,在PDF上加入更多的线条信息的任何尝试,当然都将面对增加注意力过滤的挑战。
(5)情景意识第三阶段:预观。表1第5列描述飞行员对即将到来的转弯的意识,即预期状态意识,Endsley已将其与第3SA阶段联系起来。我们预期(Beringer2000年证实),多点航路提供的更大预观好处在指令航路是弯曲的(或改变其下降/爬升率)的情况下会显露出来。我们也可以预计极小的GFOV以至于它们不包含弯向一边的航路视野,也将在转弯时减少第3阶段SA,效果与Beringer and Ball(2001年)的结果相一致。
(6)清晰度。将要处理的潜在变量驱动问题的最终来源,关系到任何图案、符号的易辨性或易读性,或直接关系到远处的地形描绘。随着GFOV的增加,更多的这种地形将引入给定大小的显示,那些要求高视敏度的项目将必然减少它们的大小。在一些尚未明确规定的视角可能引起易读性问题,导致混淆、眼睛疲劳,或视觉的高工作负荷。Kroft and Wickens(2001年)观察到类似的问题将发生于显示尺寸减小时,除非这种减小与文本/图标尺寸相应的增加相对应。但是在这种情况下,这样的解决方案可能会导致混杂和注意筛选代价的相应增加。
1.2 现在的研究
目前的研究工作涉及两个试验,研究了主飞行显示变化引起的飞行员表现、工作负荷和情景意识变化。第一个试验的目的是比较三种引导符号格式:FMA,高强度的空中隧道和低强度空中隧道。第二个试验的目的是使用第一次试验中最有效的符号表示法。两个因素,视域(视域,30°和60°)和显示尺寸(大,小)以正交的方式操作。
在这两个试验中,飞行员都必须准确地飞一个弯曲的阶梯下降进近,其中包括PFD显示的若干航向和高度变化。在试验1中,航路或者是通过FMA或者或两条隧道之一显示;试验2,只使用低强度隧道主要在VMC下飞行,因为该显示支持第1个试验中的最佳总体表现。航道保持的表现得分,依据俯仰,航向,垂直和水平偏离指令航路中心的程度。
每次飞行都因下述4类离散事件而中断。(1)显示周边的周期信号需要立即确认(Wickens,Gempler&Morphew,2000)。响应速度和准确性同时被用来评估显示特征引起的工作负荷和认知隧道的程度。该任务还强加一些实际飞行中现实的多任务要求。(2)定期的交通目标(小飞机),与计算机生成的地形和天空图像相比是可见的,发现后同时需要尽快确认并报告它们相对于自己的真方位角和仰角。这项任务是评估交通意识。(3)在试验1中,置于计算机生成图像的定期天线退出飞行员前视角后,其相对于航路的天线位置用1个信息箱进行探测。试验2,使用经修改的SAGAT技术(Endsley,1995年;Wickens &Prevett,1995年),每一次飞行都定期暂停并且要求飞行员手动或口头答复一系列空间意识问题。手动答复要求“指出”地形的不同特征。这些任务是评估地形意识。(4)接近模拟结束的最后一件事情是要求规避机动,并与急转弯和爬升指导(如复飞)相联系。参与者在不知情的情况下,复飞导致飞机处于与另一架飞机发生严重冲突的情形中(如,生成指令航路的运算规则不知道这一“应答机关闭”飞机)。
在试验1中我们主要关心的是两个整体对比:(1)对比隧道与FMA,因为这可能影响紧迫性(因而飞行航路跟踪),以及混杂或注意和过滤代价,因为这可能会影响目标探测;(2)对比低强度和高强度隧道,因为这可能会影响到注意力过滤和交通探测。试验2,我们关注显示增益如何影响紧迫性,调节飞行航路跟踪,小GFOV的任何“keyholing”可能如何影响表现的各个方面,以及增益(特别是“整体增益”)会如何影响飞行员感知地形位置的能力。
2 试验1
2.1 参与者
18名来自于伊利诺伊大学航空学院的持证飞行教员(16名男性,2名女性)完成6个飞行方案的一系列飞行,以比较3种引导符号的格式。飞行员年龄在20-26岁之间(M=22岁)。总飞行平均小时数为503小时,而仪表飞行平均108小时。
2.2 设备
硬件:这个试验在联邦航空局批准的高逼真度全任务双重控制Frasca Model 142飞行模拟机上进行,为Archer Piper III单引擎飞机配置。此固定基座模拟机安放在面对约180°外界视景的位置(附录A)。3台Christie Digital 8110Plus CRT投影仪,带1280×1024分辨像素,将模拟图像投影到3个独立的7.5ft×10ft的DaLite FastFold屏幕。中心屏幕与侧面屏幕的角度为112.5°,这样从模拟器座位看每块屏幕的实际视域(FOV)为59°水平,水平总视域为177°,46°垂直视域。4台Evans和Sutherland模拟组合图片生成个人计算机,配备有4000Q图形和1280×1024全场景图形保真分辨率,为3个投影屏幕和驾驶舱液晶(LCD)合成视景系统(SVS)显示提供支持。每个系统都具有双重奔腾III 855MHz至1.0GHz处理器。3台戴尔GX1 500MHz的奔腾II电脑支撑模拟界面和通讯。3个600 MHz到1.8GHz双处理器戴尔工作站用于项目开发和3D世界的生成。所有计算机通过专用的3公司24端口的100MHz以太网交换机进行沟通。驾驶舱LCD SVS显示器是一个1280×1024像素分辨率的1850×18型号屏幕。屏幕尺寸是14.25in[1]×13.375in。距屏幕26.5in的视域为30°水平,28°垂直。
软件:所有计算机都运行Windows 2000。实时情景和符号生成通过Multigen-Paradigm Vega运行。三维目标通过Multigen-Paradigm Creater Pro生成,而地形生成是在Terrex TerraVista内。所有程序编制使用Microsoft Visual C++。
使用的地形模型是Yosemite国家公园一块36平方公里的正方形区域。这个数据库是由来自加利福尼亚空间资料馆美国地质勘察资料1°正方形1弧秒数字立体图模型制作的。地形模型是使用环境系统研究所的ArcGIS整合和修改数据文件建立的。TerraSim公司的TerraTools用来生成开式飞行模型,Multigen—ParadigmVega使用这个模型。
由计算机生成地形和天空图像按窗外高度使用不同的细节标准,具体是高(4000米),中等(8000米),低(1.6万米)。单一的细节标准应用在驾驶舱液晶SVS显示器上,向外投影到16000米。
2.3 显示引导符号
全部显示:全部显示形式覆盖在计算机生成的约塞米蒂国家公园(Yosemite National Park)地形背景上。一个小的二维电子地图安置在SVS显示的右上角描绘导航显示(见图4)。飞行员航路用绿线显示在NAV显示上,粉红色箭头代表沿航路飞行的自己飞机。一个典型的航路例子如图4所示。在SVS显示上,其中一个例子如图5所示,自己的飞机是一个绿色的“W”,称为校靶仪。白色预测器的对应尺寸为20英尺×60英尺×20英尺,它描绘飞行员对飞机5秒后位置的估计。预测器的空间位置是基于飞机的X和Y位置,高度,航向,空速,转弯角速度和垂直速度。该预测器与自身飞机一致始终保持一个姿态(俯仰和滚转)。高度和空速分别显示在屏幕右侧和左侧的圆表盘上。提供的天地线和自身飞机的确切航向直接显示在校靶仪上方。飞机的垂直速度显示在校靶仪的右侧带子上。仪表指示可以在下面的任何SVS的显示图片上看到。
空中隧道显示:空中隧道显示的航路是通过一系列连接的绿线框描述的(三原色值RGB=0,255,0),如图5所示。这些形成航路的线框在空中相距300英尺,在任何时候都显现它们中的5个。白色滑动框(RGB=255,255,255)沿航路领先飞机5秒钟。飞机通过维持预测器处于隧道中心位置而维持在航路的中心。
高强度隧道:高强度隧道显示如图5所示。高强度隧道是完全不透明的,alpha值为1.0。小框尺寸为205英尺×0ft×80ft,线宽为2.4ft。

图4 导航显示。典型的航路用绿线显示,粉红色箭头
(代表自己的飞机)指向它的起始点

图5 高强度空中隧道显示
低强度隧道:低强度隧道显示可在图6中看到。低强度隧道部分透明,Alpha值为0.50(50%不透明,50%透明)。航路框的尺寸为202.4英尺×0ft×77.4ft,线宽为1.3ft。
引导飞机(FMA):FMA显示可在图7中看到。FMA是一个三维透视的类似飞机的符号,对应尺寸为20英尺×60ft×20ft,并且颜色为暗红色(RGB=188,0,37),所以很容易区别于电脑生成的背景。代替描绘未来的飞行航路的隧道显示,FMA定位在现在不可见隧道的中心,领先于自己的飞机5秒。因此,通过保持自己飞机的预测标志在FMA上,即飞机保持在在航路的中心位置。如图7所示,FTA是立体化的,作为即将发生的转弯的附加预测提示。

图6 低强度空中隧道显示
2.4 任务
一般任务:这项任务涉及6次飞行,沿着曲线航路跨越崎岖地形飞往机场。飞行员需要准确飞行曲线阶梯下降进近(见示例图8),包含若干航向和高度改变,变化通过3种导航符号格式表示。每次飞行都会因下述3种一般紧急事件而中断。每一事件都要求飞行员按1个置于驾驶杆上的一键通话按钮(push-to-talk)告知探测。空速固定为100节直到最后进场航段,以确保所有参与者在每个情景中都在同一点遇到紧急事件。手动控制空速恢复通过最终进近定位点使飞机可以降落。

图7 FMA显示。白色飞机图标代表预测,而红色飞机图标代表FMA。两者都预测向左转。

图8 典型情景/航路的实例
2.5 紧急事件
周边信号:定期信号显示在显示器的边缘,要求飞行员发现后按下左侧的通话按钮确认收到信号。3种定期信号都在出乎意料的情况下发生,置于未被插入导航图占用的3个拐角。
信号用尺寸为1cm×1cm的方框标出,适当调节方框的颜色以使它们的强度与计算机模拟背景相匹配。位于显示左上角的方框以蓝色天空为背景,因此颜色为深蓝色/紫色(RGB=68.85,68.85,198.9)。显示器左上角边缘信号的例子可以在图6中看出。方框在左边较低的位置和右边的角落处以地形为背景,颜色分别为棕黄色(RGB=150.45,150.45,119.85)和深绿色(的RGB=0,63.75,63.75)。这些外围信号显示持续30秒或直到飞行员按下左侧的通话按钮,取决于哪个时间短一些。探测时间以秒为单位,从方框出现的时间开始至按下左侧的通话按钮。测量的准确度是根据飞行员是否发现了方框。
空中危险:定期的空中危险在计算机生成的天空图像背景下是可见的,同时要求认出并报告相对于自己飞机的真实方位和高度(例如,“交通2:00高”)。小飞机被认为是空中危险有两个原因:(1)小飞机可以处于天空中的特定位置并保持在该位置,使所有飞行员在每次试验中的同一位置遇到它们;(2)小飞机的颜色和透明度可以很容易调节,使探测更加困难。该小飞机尺寸为172.76m×40m×48m,颜色是与计算机生成的天空颜色相似的浅蓝色(RGB=100,142,255),Alpha值为0.49(49%不透明,51%,透明)。探测时间以秒为单位,从小飞机出现至按下左侧通话按钮的时间。测量的准确度是根据飞行员是否发现小飞机。定位精度通过再现探测到的小飞机相对于自己飞机的方位角和高度确定,因此飞行员的方位和高度反应可以测量他们的“正确性”。
天线探测:天线定期放置在电脑生成的图像上,一旦退出飞行员前视域后,通过消息框进行探测,要求报告天线是在航路的右侧或是左侧,以及是在自己飞机上方,等高或在飞机下面(相对高度)。这些设计用来评估飞行员对飞机前方的地形高度意识。天线的例子可以在图7中看出,直接靠近右侧并与航路水平。消息框为白色背景和黑色文字,20×20。反应时间以秒为单位,从信息探测开始到按右侧的通话按钮结束。测定准确度根据飞行员是否正确回答位置问题(航路右侧或左侧),和相对高度问题(之上、水平,或低于飞机)。复飞/意外事件。试验的最后一件事是由于一架波音747转弯到使用跑道上,要求驾驶员执行复飞(见图9)。波音747飞机显示在外部世界和SVS显示上。SVS认识到了即将发生的冲突并自动重新配置航路,以指导飞行员沿着复飞航路飞行(见图9)。

图9 开始复飞航路。
飞行员们不知道这条复飞航迹会导致该飞机与其他航空器发生严重冲突。该航空器的“应答机是关闭的”,因而生成指令航路的SVS算法不能识别出它,仅在外部可以看出,而在驾驶舱SVS中没有显示。当有其他航空器存在时,要求飞行员观测到时按下左边通话按钮,并采取回避机动来避免空中相撞。飞行员们若没有注意到有一架无赖航空器正朝他们飞来,试验者或模拟机自身不告知他们冲突已发生。从图10中可以看到这种复飞过程的模拟情景。

图10 在外部有一架“应答机关闭”的无赖航空器
2.6 试验设计
对被试使用引导符号格式(guidance symbology format)的操作:引导符号格式的呈现适当均衡,以便可以使用所有可能的格式组合顺序,然后逆序重复。这样,每个飞行员就能经历两次给定的引导符号格式。每个飞行员以同样的顺序飞本次试验所建立的6条航迹,以便使每条航迹都能用3个引导符号表示法检查到。
2.7 试验步骤
此次试验是在伊利诺斯州大学的Beckman学院进行的。当飞行员们到达试验室时,他们填写了同意表格(附录A)和有关他们以前飞行经验的简短问卷(附录B)。之后飞行员们阅读试验说明中的任务说明(附录C),当试验者阅读SVS引导符号说明的时候,他们观看了插图(图5~7)。在试验开始之前,要求飞行员们在面对以上描述的3种事件的时候尽可能有效的飞出航迹,如果获得许可,降落到跑道上。虽然在最后一次试飞中没有告知飞行员复飞或将有无赖航空器的到来,但是在说明中已告知,在复飞事件中能够使用SVS显示,并且在整个试验对外部的了解。然后飞行员们进行两次练习试验(1个是在隧道上,另1个是在FMA上)来熟悉他们各自的飞行动力学、任务和引导符号。一旦练习阶段成功完成,飞行员们开始进入以上规定的试验阶段,即飞6次。每次试验大约持续8到10分钟。在每次试验结束后,通过使用NASA TLX量表收集主观精神工作负荷评定,以便可以比较当经历不同引导符号时的主观工作负荷。
2.8 试验1结果
目前的研究目标是调查在3种引导符号格式环境下的飞行表现、情境意识和主观精神工作负荷,这3种引导符号格式:FMA,高强度空中隧道,低强度空中隧道。只有不到5%的数据移除外部。对航迹偏差数据(俯俯仰角、航向、高度、横向偏差)进行对数变换,目的是产生更正常分布的数据集。
2.9 主要的飞行航迹表现
通过对俯仰角、航向、高度、横向偏差进行一系列计划的比较来检测主要的飞行航迹表现,同时分析每次试验飞行员偏离自身航迹的次数。通过测量对航迹中心线的绝对偏差来确定所有的偏差,测量时间从每1个方案开始到降落到跑道上。通常,首先完成高强度隧道和低强度隧道之间的一系列的计划比较;其中最坏的然后再同FMA进行比较。总的来说,所有显示类型的飞行航迹表现都是非常好。
俯仰角偏差:图11为按显示类型的俯仰角偏差数据。从高强度隧道和低强度隧道之间的计划比较可以看出显著主要影响,F(1,17)=6.75,p<0.02,低强度隧道(M=0.83°)的俯仰角偏差比高强度隧道的(M=0.76°)要大。当把低强度隧道与FMA(M=0.93°)进行比较时,结果发现,就俯仰角保持来说,FMA的飞行航迹表现比低强度隧道的要差,F(1,17)=6.88,p<0.02。通过比较,在航段类型上存在显著影响,比较结果表明直线航段(M=0.80°)的平均绝对偏差比曲线航段(M=0.89°)的要小,(p<0.05)。航段类型与显示类型没有相互影响(p>0.95)。
航向偏差:计划的比较结果表明,每个航段上相对于指令的航向保持,低强度隧道(M=1.38°)比高强度隧道(M=1.53°)更有效,F(1,17)=2.03,p<0.05(见图12)。高强度隧道和FMA(M=1.61°)之间没有航向偏差差别,F(1,17)=0.85,p=0.37。航段类型的主要影响是显著的,直线航段航向偏差(M=1.08°)比曲线航段(M=1.93°)的小(两者p<0.01)。航段类型和显示类型之间没有相互影响。

图11 显示和航段类型的平均绝对俯仰角偏差

图12 显示类型和航段类型的平均绝对航向偏差
高度偏差:考虑到高强度隧道(M=4.19ft)和低强度隧道(M=4.22ft)之间缺少高度偏差差异(见图13),按航段类型对所有3种显示进行方差分析。虽没有航段类型的影响(p=.39),但比较发现垂直飞行航迹表现隧道比FMA要好。

图13 显示和航段类型的平均绝对高度偏差
横向偏差:如图14所示,不显著的趋势表明低强度(M=7.39ft)隧道偏离航迹中心线的横向偏差比高强度(M=8.21ft)隧道的要小,F(1,17)=2.91,p<0.11。在高强度隧道和FMA(M=7.65ft)之间没有差异,F(1,17)=1.07,p=0.32。这两个比较再次表明了航段类型的重要影响,直线航段(M=5.71ft)的横向偏差飞行航迹保持比曲线航段(M=9.79ft)的要高,(两者p<0.01)。

图14 显示类型和航段类型的平均绝对横向偏差
航迹偏移:航迹偏移次数可以通过计算每次试验飞行员偏离隧道占据空域的次数产生。这些数据没有按照航段类型进行分类,事实上,由于直线航段通常比曲线航段要长,因此,在给定的具体航段类型下,偏差总次数被偏离航迹机会的基数而扭曲。如图15所示,显示类型边界显著,F(2,34)=3.21,p<0.06。相比低强度(M=7.06)隧道和高强度(M=6.29)隧道而言,飞行员们在FMA(M=8.31)下偏离航迹的次数更多。比如低强度隧道偏移数目比高强度隧道要多,t(17)=-1.51,p<0.15,这一趋势并不显著。

图15 通过显示类型的偏离航迹的平均偏移次数
飞行航迹保持总结:表2总结了有关显示类型和影响它们之间涉及飞行航迹保持(俯仰角、航向、高度、横向偏差和航迹偏移)的所有相关测量差异显著性的全部结果。
表2 按显示类型和相关测量的航路保持表现总结

正分数表示在该项偏差测量上显示支持最佳表现。0分数表明中性表现,而负分数表示在该项测量上显示支持最差表现。,例如俯仰角偏离给定航迹在要求高强度显示情况下最小。低强度隧道显示支持中性表现,而FMA则对应俯仰角姿态保持的最差表现。表1总结的结果表明低强度隧道显示(得了3分)比高强度隧道显示(得了1分)得分要高。这两个隧道显示都比FMA支持的飞行航迹保持表现要好,后者总分-5。
总之,对支持航迹引导而言FMA不是一个好的设计,这是相对于空中隧道显示表现要差而言。回顾图7,可以看出FMA没有提供多少关于航迹去向的预览。但是,空中隧道显示清楚地表明了预期飞行航迹,尤其是对即将到来的转弯而言,考虑到其有限预览,FMA特别成问题。FMA提供的预览位于单点上,而不是伴随灵活的注意力分配分布在更广的空间范围内。总的来说,低强度隧道支持最佳飞行航迹保持表现。
2.10 控制速度
副翼操纵:分析表明航段和显示类型有严重影响,F(1,17)=86.9,p<0.01;F(2,34)=3.85,p<0.05,同时航段与显示一起相互作用显著,F(2,34)=6.90,p<0.01。毫不奇怪,副翼偏转角曲线航段(M=7.44)比直线航段(M=5.38)更大。如图16所示,低强度显示一般产生最大的副翼偏转(M=6.81相比FMA:M=6.26,高强度:M=6.15),然而相互作用分析表明FMA对直线和曲线航段有不同的影响,减少曲线航段的操纵量,增加直线航段的操纵量。

图16 按显示和航段类型的平均绝对副翼输入
升降舵操纵:如图17所示,直线(M=4.06)航段的垂直飞行控制比曲线(M=3.52)航段的更活跃,但仅是当这些航段上的指令高度发生改变的时候才这样,F(1,17)=26.5,P<0.01。显示影响边缘显著,F(2,34)=2.58,p<0.10,表明高强度(M=3.68)显示比FMA(M=3.83)或低强度(M=3.86)显示活跃更少。
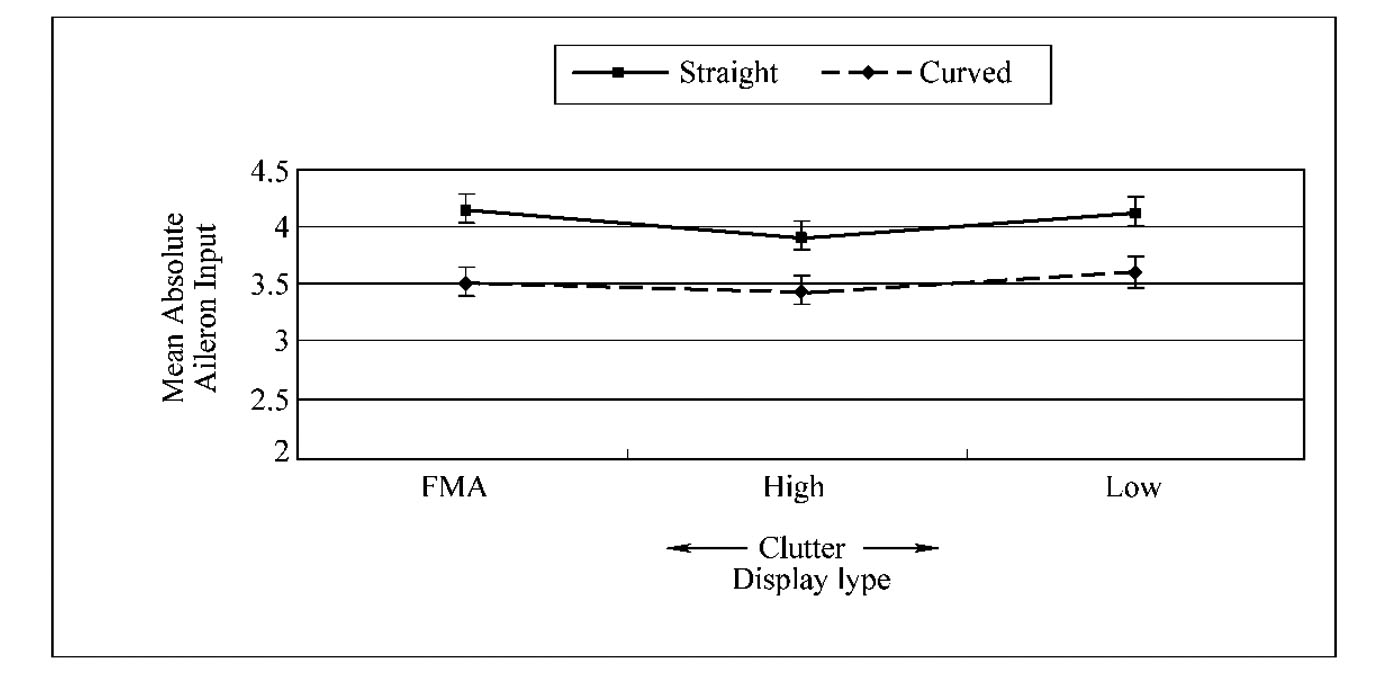
图17 按显示和航段类型的平均绝对升降舵输入
2.11 情境意识
交通意识:与那些交通趋向于外围的试验相对,在交通变得可见趋向于前视域中间的试验中(因此更可能落后于隧道)交通探测情况不同。用一些任意的划分线把小飞机(blimp)分成这样两类。实质上,将显示屏分成3部分,如果它们处于显示的中间部分,被分类的处于中部。如图18所示,小飞机的位置朝向显示中部或者朝向显示周围,这会显著影响飞行员观察到小飞机的时间,F(1,16)=11.2,p<0.01。趋向于显示中部位置的小飞机比趋于周围位置的小飞机更快被观察到,(分别为M=7.24s,M=13.4s)。也有一个不显著的趋势,例如相比低强度(M=11.1s)隧道和FMA(M=10.7s)来说,高强度(M=15.5s)隧道的平均探测时间是最长,F(2,32)=2.37,p=0.11;相互作用不显著,F(2,32)=0.35,p>0.70。

图18 按显示类型和显示区域的交通探测时间
显示类型对准确度没有影响(p>0.90))。显示在中心的小飞机被完全探测到,显示在周围的被探测到93%,t(17)=2.71,p<0.02。推测周边目标更有可能在被注意到之前穿过观察区域。
地形意识:反复测量方差分析表明,从对信息的反应速度来说,这3种显示类型之间没有差异,F(2,34)=0.12,p>0.8。在大约3s内都被检测到。
就对探测信息反应的准确度而言,飞行员们实质上都是一样的。正如前面所描述的,要求飞行员们口头指出天线探测处于航迹哪一边以及其相对航迹中心的高度,大约80%的飞行员能对探测天线位置和相对高度做出准确反应(分别为F(2,34)=0.58,p>0.50;F(2,34)=1.50,p>0.20)。
2.12 次要工作负荷刺激
次要工作探测在所有这3种情况下大约10s内对做出反应。无论探测时间F(2,34)=0.64,p>0.50,还是探测率F(2,34)=1.20,p>0.30内,这3种情况之间不存在明显差异。
2.13 主观精神工作负荷
图19为按显示类型NASA TLX量表数据。FMA(M=80.9)的主观精神工作负荷的评分最高,较高的是低强度显示(M=70.6),最低的是高强度(M=60.1)显示。这两组计划的比较t-检验结果表明在低强度和高强度显示之间存在明显差异,t(17)=2.3,p<0.04,同时在FMA和低强度显示之间没有明显的工作负荷影响,t(17)=1.15,p>0.20。这些结果表明一个有趣的分化,主观最容易的(最低工作负荷)显示,高强度隧道没有给出最佳表现,表3反应小飞机探测数据。
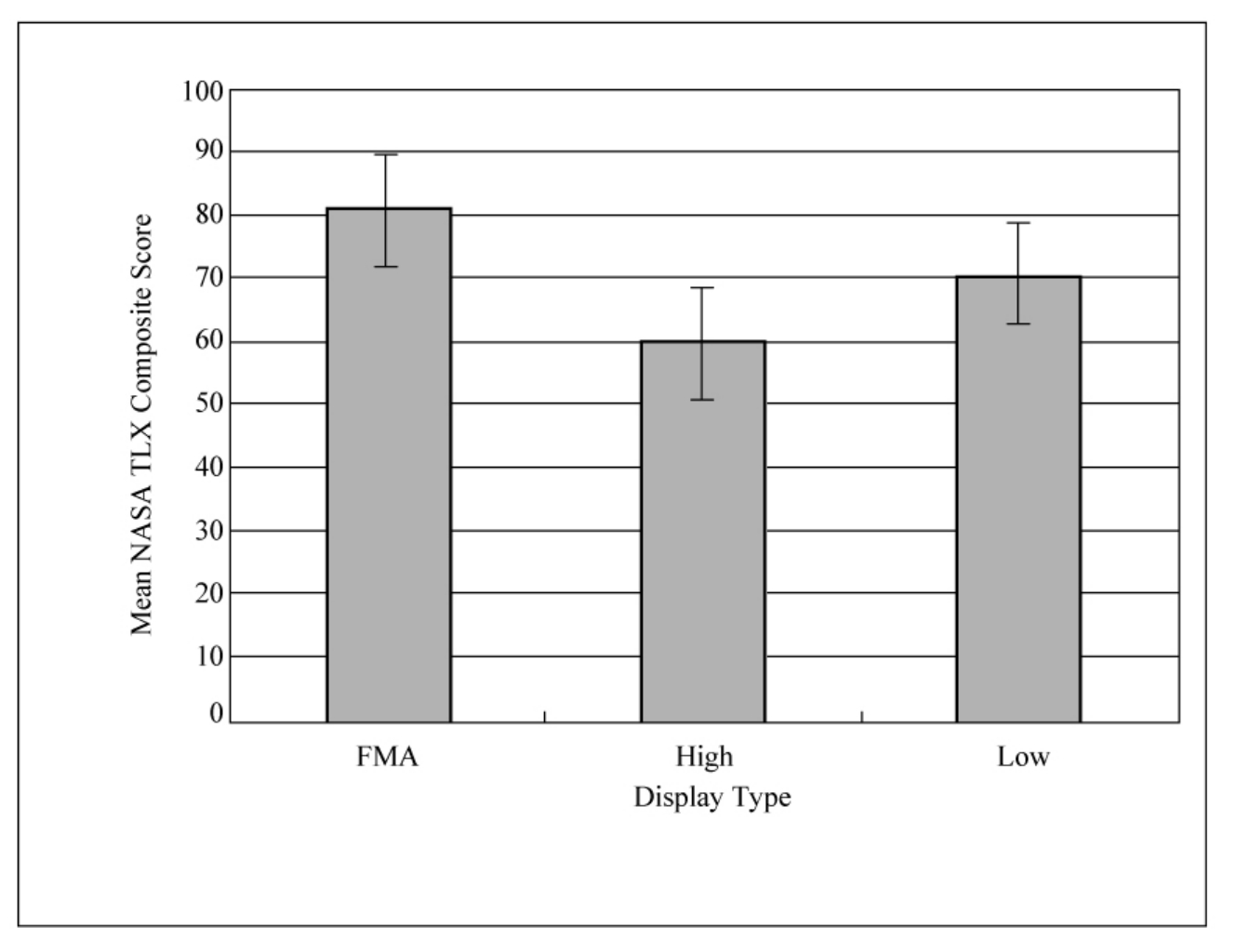
图19 按显示类型的平均NASA TLX主观工作负荷复合分数
2.14 次要任务表现测量总结
表3 次要任务表现测量总结

表3表明飞行员们在低强度显示条件下次要任务表现最好。
2.15 意外事件
在这次试验中,这18名飞行员中仅有2名飞行员观察到了复飞航迹中有无赖小飞机,他们要么采取回避要么进行评论。其他飞行员都直接朝小飞机飞过去。
2.16 试验1讨论
在试验1中,需要两个基本假设操作条件。第1,我们假设FMA能够通过提高飞行航迹表达的精确性由于更大的“紧迫”感引起更精确的(例如较低的偏差)飞行航迹跟踪,但是这样会额外引起“锁眼效应”妨碍外围目标的探测,尤其是相对于低强度隧道显示。同时,这一消极影响可能会通过减少FMA显示上的额外线条和注意筛选损失而被抵消掉。第2,我们假设高强度隧道能提高跟踪表现(使所要求的引导更突出),但是以空中目标探测为代价,目标会被更明亮的线条遮蔽。我们依次讨论这两个假设条件,先比较FMA和隧道,然后再比较这两种隧道。
2.17 引导格式:FMA与隧道比较
如表2的总结,FMA产生了有关飞行表现几乎所有方面清晰的缺点,尤其是横向和垂直偏差的两个外环测量。因此,第1个假设未得到证实。FMA没有提供更好的引导。FMA没有显露出与更多操作活动相关的不良表现,虽然它与较高的精神工作负荷有关。
在某些方面,这一结果类似于Fadden,Ververs和Wickens(2001)的发现,空中空间分布式航路会比常见的一点式ILS显示产生更好的跟踪表现。但是,在那个情况下,差异可归因于ILS显示缺乏预测信息。在这里不能应用这一论证,因为FMA包含与这两种路径中部分相同的预测信息。然而很清楚的是这里的路径相比单个FMA(仅处于未来飞行航迹的一个点上)来说,包含更多未来飞行航迹的预览信息。可以推测,飞隧道的飞行员们可得到有用的有关未来的分布式信息,在前头不同的距离(时间)点,FMA妨碍使用这一策略,因而产生3阶段SA丧失。
路径显示另一个可能的优势与要求的飞行航路的具体表达方式、单线(对于FMA)或某一区域(对于隧道)之间的差异有关。飞行员完合可能发现准确地把他们的飞机预测器与FMA排列是很困难的或是不可能的,于是放宽了他们自己内在的跟踪表现允许标准,并且要比用隧道显示时明确允许的范围,在隧道显示情况下,边界以内的任何地方都被认为是可接受的。在讨论试验2的结果时,我们从一个稍有不同的视角将再次讨论这个问题。
就情景意识而言,最直接的是交通意识测量,两种不同引导格式会表现出轻微影响,尤其当FMA与低强度隧道(图18)进行比较时。例如FMA没有表现出使注意力焦点变窄,没有妨碍对更靠边的交通目标的探测。另一方面,FMA显示中任何外围额外线条的缺乏也不会帮助探测出这些目标。最后,周边次要任务探测,以及地形探测均未能表现出FMA的收益或代价。
因此,试验1的共同结果指向隧道显示的总结优势,得出的结论与Beringer的结果一致。与隧道相比,FMA的代价,支持较少精确的航迹跟踪表现和增加精神负荷,不能用对更周边交通和障碍探测带来的好处所抵消。考虑到隧道提供的总体效益,我们现在转做研究其强度这一重要问题。
2.18 隧道引导强度:高与低比较
结果表明熟练程度对主要任务(飞行任务)在两个强度水平下表现是一致的,尽管有迹象表明低强度隧道显示下沿曲线飞行有较好的横向跟踪表现(图14)。然而这些结果似乎与直觉相反(更亮的显示预期会得到更好的工作表现),事实上与早期Ververs和Wickens(1998)所得出的结果一致,他们也没有发现通过增加强度会提高跟踪表现(使用2D HUD)。我们注意到即使在低强度情况下,强度也明显高于阈值,并且,有理由推测相关引导信息的空间分布式显示减轻了使用较低强度来提供引导信息时,在跟踪精确度中观察到的代价。
虽然飞行航迹跟踪表现对于两个强度水平,但图16和图17都表明低亮度隧道会导致升降舵和副翼稍微更大的操纵运动,尤其在直线航段上。很明显,增加控制行为可能是与低强度显示有关的评定工作负荷较高的原因。
与强度对跟踪表现的影响相比较,对隧道后或周围空中目标探测的强烈影响是预料之中的事。更大的强度损害(减慢)探测目标的能力,可多达5秒钟(图18)。与Ververs和Wickens的那些发现(他们发现高强度对探测空中目标没有代价)相比,这些发现并不奇怪,但布形成对照。强度差异对地形探测或外围灯光探测没有影响。
综合考虑强度对飞行航迹跟踪空中探测(情景意识)和主观工作负荷的影响,目前的结果允许形成重要的观察,相比交通意识的间歇任务而言,主观工作负荷等评定与连续飞行航迹控制任务更紧密相关。后者,其经历(对低强度显示,经历更多的操纵活动)是进行中的、连续的。因此,可以推测在飞行员的负荷经验和自身评级。这并不奇怪,但这表明当使用纯主观工作负荷测量进行推断时要格外小心,并不能由此得出哪种显示在工作表现的所有方面都更优越。一些方面比其他地方更优,要归咎于精神负荷经验(Yeh &Wickens,,1988)。在一定程度上,主观负荷测度掩盖了显示支持情景意识的能力,和目前情况一样,这要求在显示评估中得到明确的情境意识测度。
最后,我们注意到当他们的显示基于复飞能力引导时,几乎所有的飞行员都未能探测到“无赖小飞机”。低头引导是足够强制的,他们未能检查外部世界。在我们最后讨论中我们将返回到这个问题上。
3 试验2:隧道尺寸效应和视野范围
3.1 参与者
24名来自伊利诺斯州大学航空学院的飞行员(21名男飞行员,3名女飞行员)完成了一套具有8个飞行情景的飞行,计划比较4对显示尺寸和视野组合。飞行员年龄在20到44岁(M=24岁)。平均总飞行时间为639小时,平均仪表飞行时间是315小时。
3.2 设备
使用的设备和试验1中的相同。
3.3 显示
所有显示形式再次覆盖在如试验1描述的计算机生成的约塞米莱国家公园地形背景之上。根据不同的视野(30°或60°)和显示尺寸(小的8”×6.5”或大的10”×8”)配置SVS显示。视野决定在显示上描述多大的区域。30°的FOV给出一个非常狭窄的观察范围,而60°的FOV给出比较宽阔的视野。显示尺寸仅仅决定SVS显示在屏幕上占有多大的区域。相同数量的信息也在其他情况中得到描述,但是实际显示尺寸要么大要么小。各种FOV显示尺寸组合,见图20a和20b。
3.4 任务
一般任务。飞行任务包括一系列的8次飞行,沿着类似于试验1崎岖地形上空的曲线航路飞往机场。飞行员需要准确按照飞行航路阶梯下降进近(例如图21),其中包含一些由3种引导符号形式中的一种表示的航向和高度变化。飞行可被下述3类常见的紧急事件中断。直到最后的进近航段空速都固定在100节,以确保所有参与者都在相同的环境下在同一点上遇到所有紧急事件。手动控制空速继续飞行通过最终的进近定位点,使飞机可以降落。
3.5 紧急事件
周边信号:如试验1,要求飞行员发现显示边缘的周期信号后按压左侧通话按钮对信号进行确认。在每一种情形下,有3个周期信号在出乎意料的时刻发生,3个没有被插入导航图占用的拐角的每1个都有一个这样的信号。这些周边信号显示30秒或直到飞行员按下左通话按钮,取决于哪个时间短一些。探测时间从方框的开始显示时间到按下左侧通话按钮为止以s为单位计算。测量准确性根据驾驶员是否发现方框计算。
空中危险:如试验1中,定期空中危险在计算机生成的天空图像背景上可见,飞行员需要确认并报告它们相对于自己飞机的真实方位和高度(例如,“交通2:00高”)。探测时间从小飞机开始出现时间到按下左通话按钮为止以s为单位计算。准确性根据驾驶员是否发现小飞机测度。定位准确性的确定是通过重现探测到小飞机时的情况确定小飞机相对于自己飞机在响应时的真实方位和高度,据此校验飞行员的方位和高度反应的“正确性”。

图20a 使用的视野和显示尺寸组合:(A)FOV30°,小显示尺寸FOV60°,小显示尺寸(实际显示背景是黑色的)
地形意识和记忆探测:定期模拟暂停导致SVS显示和外界的消隐。使用SAGAT技术(Endsley,1995年),在此暂停期间问飞行员一系列问题,这些问题需要口头的或是手动的答复。第一个问题总是需要手动答复,通过使用位于驾驶杆左臂上的“瓷帽(china hat)”来定位一个白球,白球显示在外部世界屏幕被质疑的位置上,而第二个要求口头答复。被质疑位置总是涉及远离或者刚超出飞行员前视域的一小块彩色陆地。一旦白球放置到了他们认为的地形位置上,飞行员就应该按压左侧PTT按钮来继续下1个问题。第2个问题回答后,飞行员然后按下右侧PTT按钮继续试验飞行。飞行员在模拟暂停过程中不允许改变控制,这样他们就可以从自己在暂停前的确切位置继续飞行。被质疑位置的准确性根据错误类型,即注意力或判断力来度量。若飞行员没有看到显示器上彩色的小块地形,发生注意力差错;若飞行员将白球放置在错误的位置上,就发生判断差错。因此注意力错误应按错失探测的数量报告,而判断差错应根据他们的空间误差大小报告。

图20b 使用的视野和显示尺寸组合:(C)FOV30°,大显示尺寸FOV60°,大显示尺寸(实际显示背景是黑色的)
进近/意外事件。在试验1中用到的进近和意外事件再次用到试验2中。
3.6 试验设计
使用引导符号形式的一个内课题操作。呈现的显示尺寸×FOV形式是相互平衡的,使每一个可能的形式组合都用到,然后以相反的顺序重复。因此,每个飞行员需要经历两次给定的显示尺寸×FOV组合。每个飞行员按照相同的次序在试验建立的8条路径中飞行,使每条路径都可通过4个显示尺寸×FOV形式进行观察。
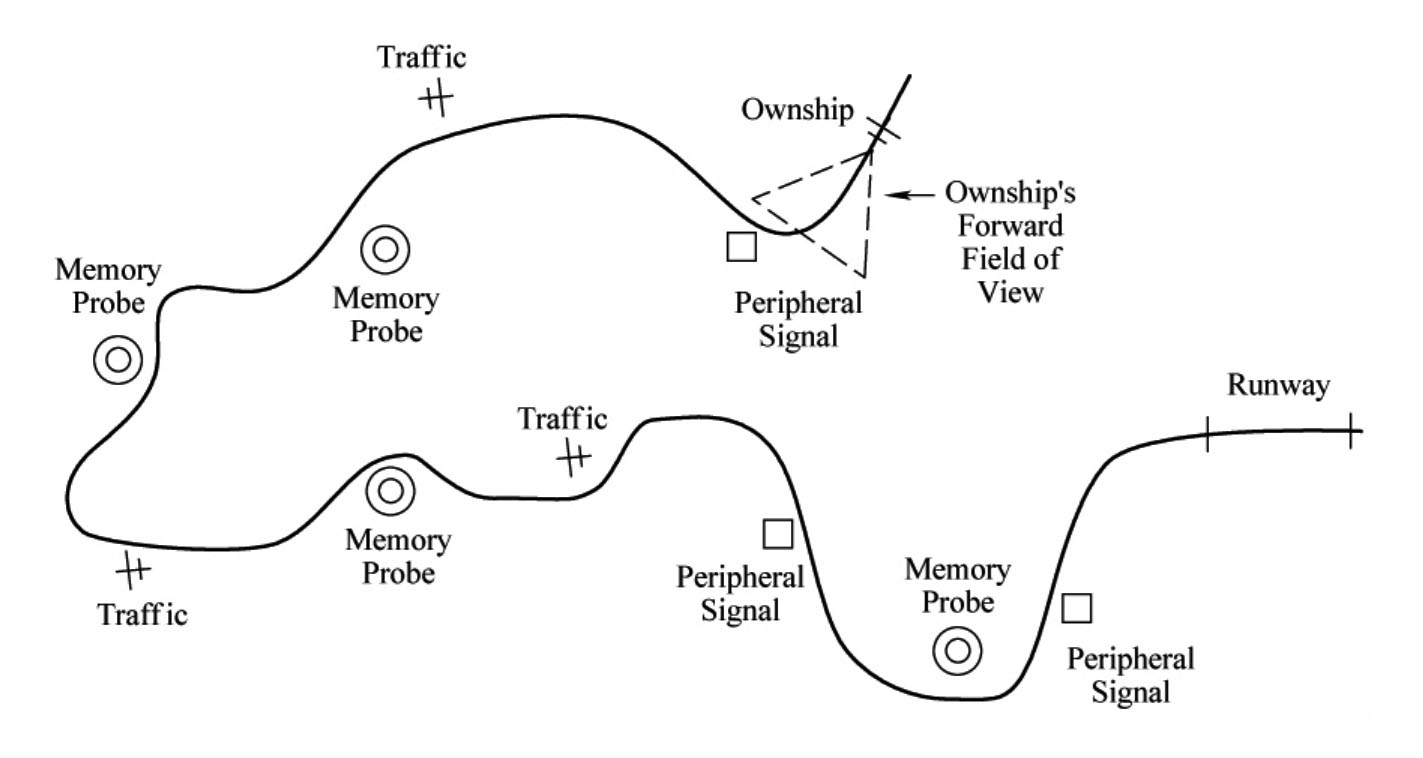
图21 一个典型的场景/航路举例
3.7 程序
试验工作在美国伊利诺斯大学贝克曼研究所进行。当飞行员抵达试验室,填写一份知情声明表(附录A)和一个关于他们以前飞行经验的简短问卷(附录B)。飞行员随后阅读试验的任务说明(附录F),同时在试验员阅读SVS引导符号(附录G)说明时观看图示说明(图20A及图20B)。试验开始前,指导飞行员在对上述三种事件做出反应的同时尽可能有效地按照航路飞行,并在获得许可后降落在跑道上。飞行员没有被告知在试验最后会发生复飞或存在干扰飞机,但在说明中告知整个试验过程中一旦复飞可应用SVS显示,以及他们在整个试验过程中都应保持对外部世界的认知。然后飞行员飞行两次练习来熟悉飞行动力学、任务和显示形式,一次使用30°视域的小显示尺寸,另一次使用60°视域的大显示尺寸。成功完成练习阶段后,飞行员按照上述规定开始试验部分,飞行8次试验航路。每次试验持续8至10分钟。每次试验后用NASATLX量表(附件E)采集主观精神工作负荷评分,以便对经历各不相同的显示尺寸×FOV的主观工作负荷进行比较。
3.8 试验2结果
飞行员是否参与第1个试验不能说明任何独立测量方差的显著差异性(所有p>0.15)。固而,数据分析不再考虑这个变量,而是依照被试内重复测试的设计。少于5%的极端数据被排除。为产生更加正常分布的数据集,对航路偏差数据(俯仰,航向,高度和横向偏差)进行了对数变换。
3.9 主飞行航路表现
主飞行航路表现通过对俯仰、航向、高度和横向偏差进行一系列2(显示大小)×2(视域)重复测量ANOVA分析进行研究。所有偏差都是通过测量自己飞机相对于航迹中心的绝对偏差来决定的。如同试验1,飞行航路表现在所有显示形式下都非常好。
俯仰偏差:无论在主效应或交互效应上都没有显著性差异(X=0.74,所有p>0.20)
航向偏差:在图22a和b中可以看到,航路类型(直线型或曲线型)对航向偏差有显著影响,F(1,23)=517.9,p<0.01,直线型航路的偏差(M=0.95°)要小于曲线型航路的偏差(M=1.79°)。虽然,30°FOV(M=1.30°)的平均绝对航向偏差明显要比60°FOV(M=1.44°)平均绝对航向偏差小F(1,23)=5.555,p<0.05,但图22揭示这一影响只能通过FOV与显示尺寸有显著交互影响解释,F(1,23)=11.1,p<0.01。这种交互影响是由于小的显示内FOV有更显著影响,F(1,23)=16.8,p<0.001,仅当显示小时,30°FOV(M=1.20°)的航向偏差比60°FOV(M=1.50°)的航向偏差小。

图22a 直线型航路按显示尺寸和视域的平均绝对航向偏差
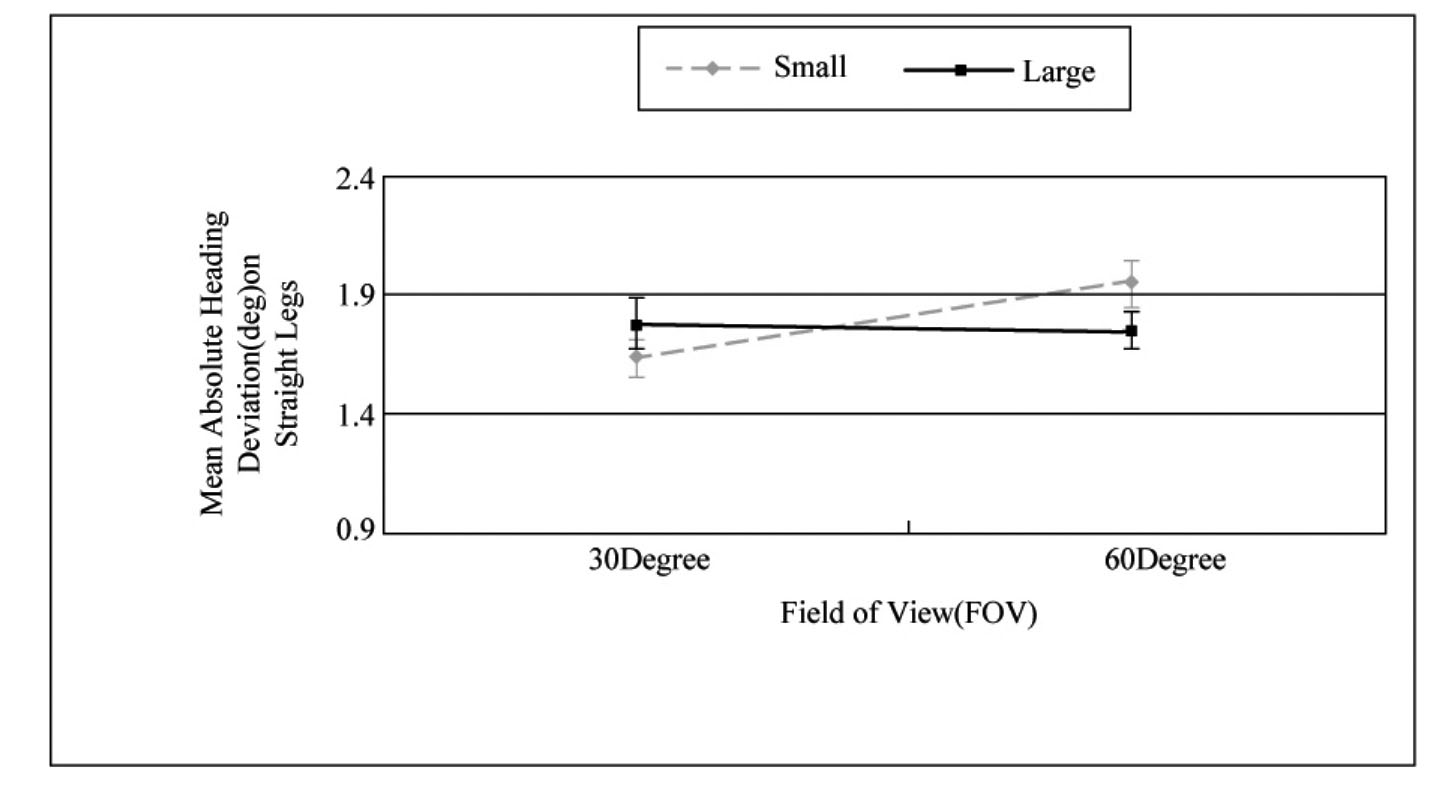
图22b 曲线型航路按显示尺寸和视域的平均绝对航向偏差
高度偏差:图23a和b揭示了航路类型的显著影响,F(1,23)=7.99,p<0.01,飞行航路在垂直方向的保持上,曲线型航路(M=4.41ft)要优于直线型航路(M=4.88ft)。重复ANOVA揭示显示尺寸和视域对于平均绝对高度偏差有边界显著影响(分别为F(1,23)=3.19,p<0.09,F(1,23)=3.28,p<0.09)。与大显示尺寸(M=4.77ft)相比,小显示尺寸(M=4.53ft)的高度偏差要小些,60°FOV(M=4.49ft)的高度偏差也比30°FOV(M=4.80ft)高度偏差小。视域与显示尺寸的交互影响不明显(p=0.74)。

图23a 直线型航路按显示尺寸和视域的平均绝对高度偏差

图23b 曲线型航路按显示尺寸和视域的平均绝对高度偏差
横向偏差:图24a和b揭示显示尺寸和FOV影响自己飞机的平均绝对横向偏差。曲线型航路(M=10.6ft)影响横向偏差的程度要比直线型航路(M=5.92ft)更大,F(1,23)=84.8,p<0.001。对于两种显示尺寸,30°FOV(M=9.09ft)的横向偏差要大于60°FOV的横向偏差(M=6.66ft),F(1,23)=36.1,p<0.001。FOV与显示尺寸有显著交互影响,F(1,23)=11.1,p<0.01,对于较小视域显示,显示本身比较大的横向偏差将比较小的显示的横向偏差增加得更多。
航迹偏离:图25显示偏离航迹或低强度空中隧道显示的平均次数。虽然60°FOV(M=16.1)航迹偏离的平均数比30°FOV(M=18.9)偏小,边界显著F(1,23)=3.40,p<0.08,但该影响必须在FOV与显示尺寸交互影响下才能解释,F(1,23)=4.57,p<0.05。这种交互影响是由于在30°FOV条件下显示尺寸有显著影响,F(1,23)=4.66,p<0.05,与显示尺寸大时(M=20.2)相比,显示尺寸小时(M=17.5)航迹偏离数也小些。这种模式类似于横向偏差(见图24)。

图24a 直线型航路按显示尺寸和视域的平均绝对横向偏差

图24b 曲线型航路按显示尺寸和视域的平均绝对横向偏差
3.10 飞行航迹保持小结
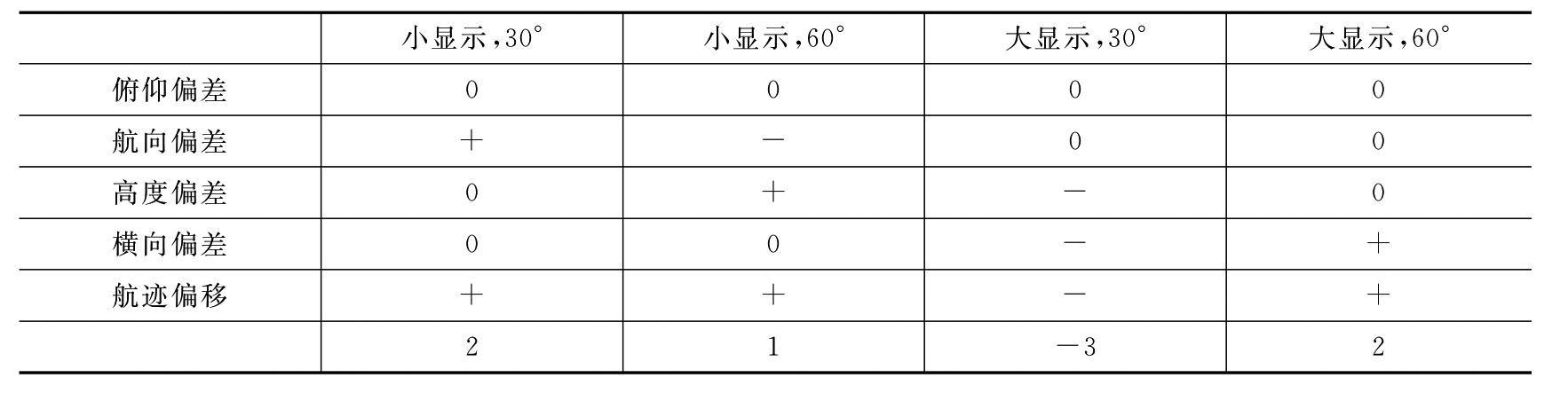
表4对飞行航迹在试验中4种显示条件下的保持表现做了总结。如同试验1,正分代表显示条件支持这一偏差测量上的最好表现。0分意味着中等表现,而负分则表示所考虑的显示条件支持在特定测量上的最差表现。表4所总结的结果表明,小显示尺寸/30°FOV或大显示尺寸/60°FOV都有2项正分,优于小显示尺寸/60°FOV(1项正分)或大显示尺寸/30°FOV(3项负分)。
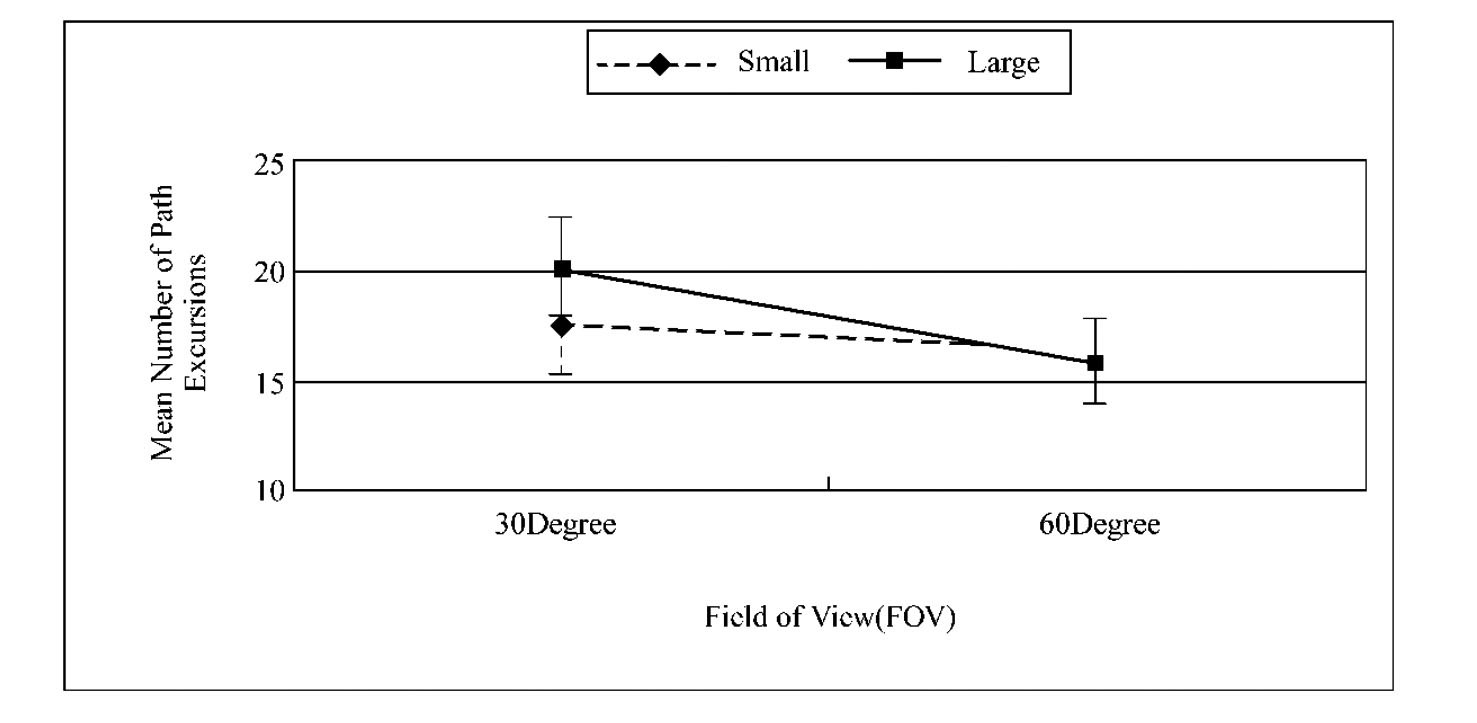
图25 按显示尺寸和视域的航迹偏离平均次数
表4 按显示形式和相关测量的飞行航迹保持总结
3.11 操纵速度
副翼操纵:图26a和b说明了航路类型的显著主效应,F(1,22)=117.9,p<0.001,曲线型航路(M=6.90)副翼操纵量要比直线型航路(M=4.57)的大。在副翼(横向)操纵速度模拟中的交互作用表现在横向误差和航迹偏差两个方面,这表明FOV和显示尺寸的结合会产生更大的偏差,交互影响显著,F(1,22)=8.42,p<0.01,也将产生更高的操纵速度。该模式表明显示引发偏差的原因与不稳定性和过度操纵有关。

图26a 直线型航路按显示类型和视域的平均绝对副翼输入

图26a 曲线型航路按显示类型和视域的平均绝对副翼输入
升降舵操纵:通过对比图27a和b看出,显示航路类型的主效应显著,F(1,23)=29.7,p<0.001,是一个简单的人为事实,曲线航路一般总是保持水平,而大多数直线航路则需要高度改变。显示尺寸和FOV对平均绝对升降操纵量没有影响(两个p>0.25)。

图27a 直线型航路按显示类型和视域的平均绝对升降舵输入
3.12 压缩分析
前面的分析主要讨论两个独立变量:尺寸大小和视域决定的显示参数。然而考虑到这两个参数选择特定值的实质,也能用压缩程度决定的单个变量来定量表达4种显示。如图28所示,显示上视角与世界视角的比例(VAD/VAW)可被认为是显示的增益,与收到的客观世界信息压缩量成反比。对于考虑中的4种显示,其增益为0.4-1.0,大显示/30°FOV代表单位增益,而0.4的增益(最大压缩量)表现在小显示/60°FOV中。
为了验证压缩显示(小增益)会导致飞行员低估飞行路径偏差从而影响偏差修正这个假设,将两个主要偏差测量,高度偏差和横向偏差绘成显示增益的函数图。
图29中,高度跟踪数据揭示了垂直跟踪表现的一个单调趋势——实际上随着增益的增大表现有所降低,而且单位增益时,表现最差。明显地,压缩不会损害垂直航迹跟踪表现。

图27b 曲线型航路按显示类型和视域的平均绝对升降舵输入

图28 显示尺寸(小:23°VAD,大:33°VAD)和视域(30°and 60°)条件图示。
(显示上的视角取决于观察距离,而且这对所有飞行员相对保持一致)

图29 按航图增益和航路类型的平均绝对高度偏差增益,用VAD/VAW比值表示,从最小到最大
大显示30°(0.4)、小显示30°(0.5)、大显示60°(0.77)、小显示60°(1.0)
有意思的是,单位增益对应于保形投影显示(若平视显示),它会导致最差的表现。我们也验证了这样的假设,因为飞行员的过量操纵(使用高增益显示有时会经历的情况)和飞行员诱发振荡会导致使用大的60°显示时不好的表现。如果是这样,那么我们会看到升降舵操纵速度特别高的速率。然而这没有被观察到(见图27)。
图30表示作为显示增益函数的平均横向偏差。这些数据再次揭示没有小增益大偏差的趋势,而且与垂直偏差数据类似,在最小压缩单位增益条件下显示出最大的偏差。然而,也应该注意到这种高增益的不利影响完全是大视野的结果,而且只在曲线型航路观察到。也可以这么说,当通过一个狭窄的FOV窗口观察前面的视景时,这种不利影响与缺少对整个飞行航路的预览相关,未来航迹变成了一个拐角。回到图26,我们可以看到30°FOV条件下的大偏差不是过度操纵的结果。

图30 按航图增益和航路类型的平均绝对横向偏差
最后分析讨论在最后着陆过程中视域对进场表现的影响。可以预见小视野有助于更好的表现,特别是在着陆环节。然而分析显示视景或显示器的大小对横向或高度航迹没有影响。
3.13 交通意识
交通探测的准确性:交通探测的准确性通过飞行员正确察觉小飞机的百分比来衡量,在每个场景下出现3架小飞机。大概95%的小飞机被飞行员发现,没有发现显著影响因素(所有p>0.16)。
交通探测的时间:交通探测时间从小飞机在显示屏上出现的时间开始到飞行员按左边通话按钮结束来测量。只有那些飞行员探测到交通的情况被用来做探测时间分析。重复测量ANOVA揭示显示尺寸和FOV对交通探测时间的显著主效应(分别为F(1,23)=14.2,p<0.001,F(1,23)=60.7,p<0.001,)。显示尺寸×FOV交互影响不是很明显(F(1,23)=2.4,p>0.13)。如图31所示,大显示尺寸条件下探测时间(M=17.8s)比小显示尺寸下的探测时间(M=22.6s)快。图31也证明了FOV差异,30°FOV(M=14.1s)条件下探测时间比60°FOV(M=27.8s)条件下的探测时间快。所有这些表明最大倍率放大交通对探测是最有利的,这也就是说探测速度直接与显示的飞机大小相关(像素)。

图31 按显示大小和视域的交通探测时间
地形意识:地形意识通过在模拟暂停条件下使用记忆探测来评估。在每个场景中都将安置彩色斑点,而且4个这样的斑点与模拟暂停情况联系到一起,对斑点位置进行质疑。要求飞行员将一个外面世界中的白球放到他所认可显示上的彩色斑点在过的位置。与这个任务有关的差错可分为两种类型,注意力差错和判断差错。
注意力差错:注意力差错的定义是飞行员没有看到过显示内的彩色斑点,因此不能确定该在哪里放。748个彩色斑点中只有78个被飞行员遗漏,整体探测率为89.6%。个别的飞行员在整个试验过程中会遗漏大概0到8个,探测率最低为75%,最高为100%。数据中有1个不显著的趋势意味着不同的FOV会有不同的注意力错误,χ2(1,N=78)=2.30,p=0.13,在60°(M=45)FOV的条件下比在30°(M=33)FOV的条件下有更多的彩色斑点被遗漏(见图32)。这一发现与压缩使得一些斑点很难被发现这一观点是相一致的。

图32 按显示尺寸和视域的注意力差错数量
判断差错:判断差错在重复试验过程(M=380像素)中比第一次飞行(M=301像素)更严重,这显示出可能的疲劳影响F(1,15)=10.1,p<0.01(见图33a和b)。然而,更重要的是FOV的显著影响,F(1,15)=3.47,p<0.09,这表明地形探测的平均估计误差,与30°FOV(M=399像素)相比60°FOV((M=305像素)效果会更好。显示尺寸的影响并不显著(p>0.80),显示尺寸的交互作用也不显著(所有p>0.30)。

图33a 按视域和显示尺寸第一次试验的平均估计差错

图33b 按视域和显示尺寸第二次重复试验的平均估计差错
判断差错的趋向是通过比较地形探角针的实际位置到显示屏中心的距离与飞行员估计位置到显示中心的距离而决定的。正的差错被定义为判定位置到显示中心的距离比真实的距离要远;负的错误则相反。分析560例飞行员在显示屏上估计地形探针与实际一致(左方、中央、右方)的实例,显示出飞行员多数情况下在他们的判断中产生负的差错,他们估计地形探测与其事实位置相比更倾向于屏幕中心((N=544),χ2(3,N=560)=498,p<0.01)。这里只有16例飞行员犯正的差错。
给定绝大多数的负差错趋势,视域的边界显著影响可解释为较小的视域使得飞行员倾向于估计地形探测距离中心的距离比实际要近。实践后,这种趋势尤其明显(亦即,在第2次重复过程中)。最后,地形意识差错数据中还可发现1个有趣的结果,单位增益条件(大显示/30°FOV)并不支持最好的地形意识。
地形探测反应时间如图34a和b中所示,试验中缩短的反应时间(从第1次M=6.27s到第2次重复M=4.96s)是可以理解的训练影响,F(1,19)=31.4,p<0.001。小的显示尺寸(M=5.48s)比大的(M=5.81s)显示尺寸有更快的RT,F(1,19)=5.22,p<0.05,大概反映出在给定越小的监视显示区域时,注意到地形探针的能力越强。在30°(M=5.66s)FOV和60°(M=5.62s)FOV(p>0.80)之间没有显著差异。
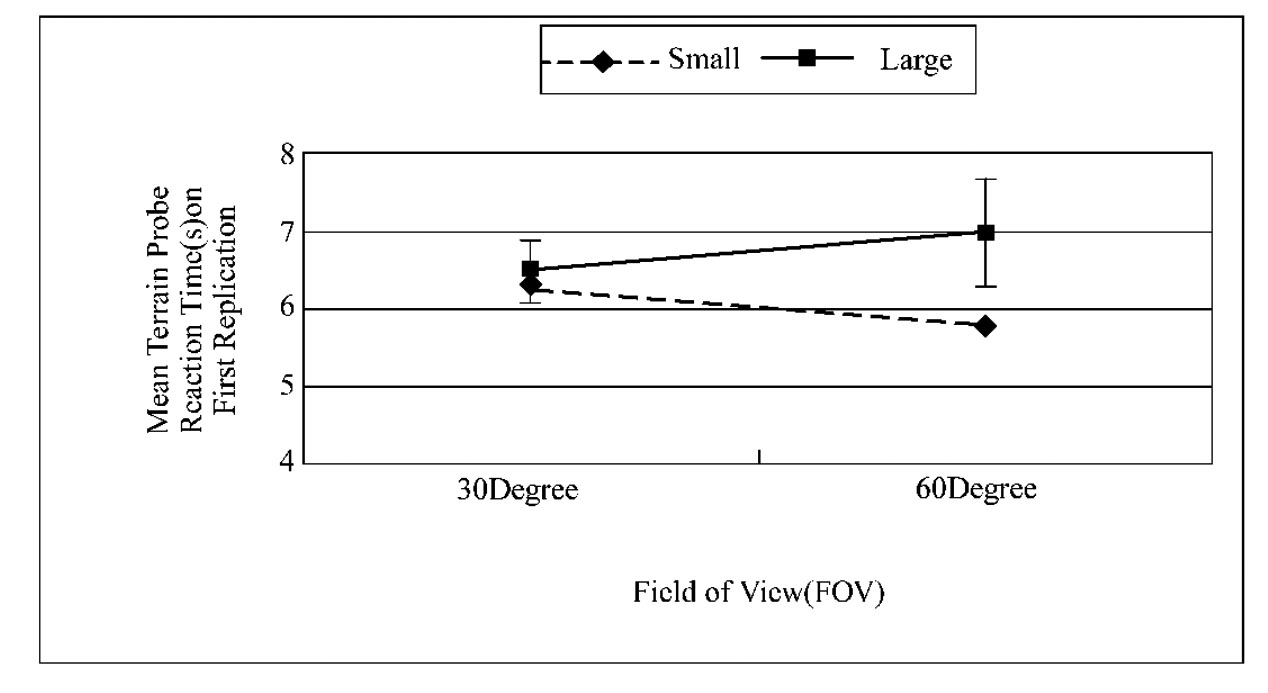
图34a 第一次试验按视域和显示尺寸的平均地形探测反应时间

图34b 第二次重复试验按视域和显示尺寸的平均地形探测反应时间
记忆探测准确性:在主效应或交互效应中没有显著的不同(M=74.7%,p>0.25)。
记忆探测反应时间:如图35所示通过实践降低记忆探测RT(第一次M=5.69s,第二次重复M=5.25s,F(1,19)=11.5,p<0.01),这大概与普遍增加的方案熟悉程度相关,使得飞行员能够更快做出决定。显示尺寸或是FOV(p>0.60)都没有影响,但是重复的交互影响有边界的显著程度,F(1,19)=4.09,p<0.06,不清楚而且还无法解释。

图35a 第一次试验按视域和显示的尺寸的平均记忆探测反应时间

图35b 第二次重复试验按视野和显示的尺寸所得的平均记忆探测反应时间
3.14 次要工作负荷刺激
刺激探测准确性:飞行员在周边刺激出现后有30s的反应时间,在每一个方案中都出现3次。刺激探测的准确性不受显示形式(尺寸/FOV)的显著影响,也不受显示尺寸×FOV的交互影响(p>0.20)。
刺激探测时间:周边刺激探测时间用重复测量ANOVA分析。如图36所示,FOV的显著影响表明刺激探测时间在60°(M=3.0s)比30°(M=4.8s)要快,F(1,23)=p<0.05。然而,显示尺寸或是显示尺寸与FOV交互都没有影响。(p>0.50)
3.15 主观精神工作负荷
尽管飞行航路保持和紧急事件表现的数据表明不同显示形式之间有区别,就如同之前的讨论,报告的主观精神工作负荷评定等级没有任何不同。此时的精神工作负荷的平均评分(M=80.8,p>0.30)比试验1(M=70.5)的要高。

图36 按视野和显示尺寸的刺激探测时间
3.16 意外事件
24名飞行员中有7人探测到并且采取行动避开干扰的小飞机。如表5所示,这些飞行员中有4人参与了第一阶段研究(称为“熟悉的”),3人没有参与(称为“生疏的”)。虽然探测到干扰小飞机的飞行员遍及所有显示状态,有趣的是除一位飞行员外,其他所有的飞行员是在最大程度压缩的情况下(小显示尺寸/60°FOV)未能及时探测到突如其来的事件。
表5 探测到意外事件/干扰小飞机飞行员的分布

3.17 讨论试验2
在试验2中,我们通过以下2种方法操作表示外界距离的显示距离尺寸:通过视域(放大,30度,或者缩小,60度)进行外界表达和通过显示尺寸。这些都会影响到VAD/VAW的比例,这意味着航图比例尺或者显示增益表示。形成下述3个主要假设。(1)我们假设一个较大的航图比例代表更高的增益,将会产生更大的减少偏差紧迫感,从而减小飞行航迹跟踪误差,也有可能增加操纵活动和工作负荷时。(2)较小的视域,对外界的描述更少一些,会导致失去情景意识的锁眼效应(“keyholing”)。(3)特定的接近于单位的VAD/VAW比率,与直接观察情况相比,在了解物体的位置时将会产生最小的偏向。这种降低的偏向将会提高情景意识相关的估计能力,也可以提高航迹跟踪表现,因为显示上的增益与直接观察的增益几乎一致。我们将讨论这些假设,首先用飞行航迹控制数据,然后用情景(地面)意识数据。
3.18 飞行航路引导
对4种显示条件下纯理论的“紧迫”假设可以进行评估,如图28中沿显示增益轴排列,与图29以及30中的一样。图中的数据显然与假设相反,更大的增益不是降低航迹跟踪误差,且最小增益的“压缩”(小的,60°FOV)也没有在降低紧迫感并增加误差。确实,这种趋势一致地朝向相反的方向。对于两个飞行轴,和两种压缩方式(尺寸、视域)或者没有影响,或者在最大压缩显示F最好(在高度偏离情况中,图29)。另一方面,缺少压缩显示的代价,意味着飞行员有能力有效地补偿缩小的显示比例尺。他们本质上,是跟踪真实空间内飞机的位置,而不是在显示空间跟踪一个标志。这个行为是恰当的而且是最优的。另一方面,实际飞行航路跟踪在最小压缩的单位增益时表现降低需要进一步解释,至少可以提供2点解释。
我们的第1个解释是基于图23b中的数据,图中描绘窄视域中横向偏离有严重代价,为曲线进近所独有。这一结果直接表明存在窄视域的锁眼效应“keyholing”。假设2,为其巩固。有理由推测,飞行员在转弯时对飞行航迹的未来路线了解更少,此时他们的视野限制在相对狭窄的入口,与Beringer和Ball(2001)的结果一摸一样。第2,在直线型航段上,小的横向偏差代价(30°显示),以及小FOV与大显示大略相同的垂直代价,表明额外的损失和高增益显示相联系。根据与飞行员面谈的结果,我们的解释是这个效应可能是由飞行员对操纵必要显示要素的注意力分配造成的。
在我们的最初的紧迫性假设中,我们假定飞行员注意(并减少)飞机与隧道中心之间的偏差。因此,这个偏差描绘得越小(像素/视角),被矫正的可能性就越小。
然而,还有1个我们的飞行员建议的可以参考的解释是,飞行员操纵时注意(并增大)飞行器位置与隧道边缘的偏离,当这个偏离被察觉很小时,就需要操纵。在这种情况下,预示着相反的结果,对隧道边缘的较小偏差被认为更紧迫,因此,在压缩显示下就会更多地进行修正导致更好的跟踪。一位飞行员评论道:用30°FOV大显示呈现出大的隧道时,他变得有点得意,觉得到距离隧道边缘还有很大一段距离。如果这种策略有效,我们预期会看到使用30°FOV显示时更多的航迹偏离次数,以及偏离发生时更粗猛的操纵。如图25、图26所示,对大尺寸的30°视域显示我们真地观察到了这两种结果。但是,我们注意到这种行为并没有在垂直(升降舵)操纵中表现出来,也没有反映到主观工作负荷中。
单位增益显示应当具有增强表现的特殊性质,很大程度上类似于HUD上的保形投影可以增强飞行航迹跟踪表现(Wickens &Long,1995),这一特性与我们的第3个假设密切相关。在这个案例中,保形投影被定义为在显示的视角与前方视野之间的直接映射,这一映射在30度/大显示条件下获得。正如我们前面所提到的,这种显示并不能提供更好的表现,一个复制Beringer和Ball(2001)以及Ververs和Wickens(1998)的结果,他们曾在一平视显示上对比过保形投影与“被压缩的投影”的导航信息。在接下来的部分,将会看到在我们的地形意识测度中关于单位增益设有更重要的测试。
3.19 情景意识与工作负荷
试验2中,在一个类似SAGAT评估中,试验周期性的暂停,要求飞行员指出某些重要地形位置的方向,这些特定的地形用置于其图上的小方块示意。因为我们感兴趣的是最直接测度飞行员感知到这些地形在实际空域中的位置,我们的响应设计基本上是直接模仿指向外界位置。对于所有显示,飞行员趋向于更多指向航路的中心,而不是地形元素的真正位置,就像显示中的元素图像(小于屏幕的测试范围的)使他们的估计向内偏一样。然而,与我们的假设3相反,假设3认为从单位算起更大的显示压缩会进一步扭曲这种判断,但事实上我们发现1个反方向发展的趋势。这种单位显示从来就没有表现出优异性,事实上两种30度显示呈现出比60度较差的表现,即使30度有较小的扭曲压缩。解释这一现象,我们只能说单位比例尺对非HUD显示没有益处,这个解释与Wickens和Long的观点一致,他们曾发现对于HUD增强保形的好处,进一步来讲,地形可视视场的减小(30°FOV)产生同一种锁眼效应,损害飞行员保持位置和空间定向的能力。
除了地形意识是我们注重的焦点外,推理按说这也是最容易受FOV操作影响的要素,同时还有其他一些影响(或无影响)也值得注意。在试验1中重要这里不那么重要的交通意识与交通探测也受显示压缩所干扰。同时具有小FOV和大显示的效果是最快的(图31)。这种影响可以直接归因于交通表达所对的视角,FOV越窄屏越大,这个视角就越大。支持这一解释的事实是产生显示尺寸更大增加的变量(2∶1,通过改变FOV,对比3∶2,通过改变尺寸),同时产生探测时间更大降低,见图31。
只有很少的其他证据表明显示参数影响系统性能、工作负荷和情景意识。主观工作负荷评分并不受这两个变量影响,也不受飞行航路参数探测手段影响。仅周边探测RT有趣地展示了与小视域相同的代价模式(图36),这一影响的原因还不是很清楚,但可能是在应对窄FOV锁眼效应中,附加的认知困难产生的一种间接影响。另一种观点认为小的FOV放大了自身飞机的运动,导致有种“强迫”侵入显示中,从而干扰次要任务。这种解释与Olmos,Wickens和Chudy(2000)的发现一致更多的关注飞行航路将导致认知隧道失去探测周边显示上更靠边事件的能力。
简而言之,试验2的综合结果否定了越大越好的假设,根据我们检测的一系列FOVs和显示尺寸,可以得知小屏幕至少要好一点。这一结论囊括操作因素,小物理尺寸的显示,以及大视域压缩下减小物理图像尺寸的显示。事实上,数据总体支持宽FOV显示。这一结论可以通过两个方面来调整。第1,大视屏的最大好处是可以较快地探测交通,这可以直接归因于小飞机图像显示的大小。需要提到的是这种显示上的交通描述是要用符号图示,这样可以在相对不变水平上维持重要目标的视角而独立于距离。第2,这一结论显然受所考虑的尺寸范围(或显示增益)约束。如图28~30所示,我们目前的工作仅仅研究2.5倍范围的显示增益(从0.4到1.0)。我们可以假设极其小的迷你显示会带来分辨困难,许多位置相近的符号会造成混杂(Kroft &Wickens,2003)。
4 总结
总体上讲,结果指出低强度隧道的整体优势(试验1),这种隧道呈现在一个尺寸并不需要很大可以相对较小(7”)而视域较大(试验2)的显示中。我们的数据是在一个保真度相对较高的模拟中搜集起来的,除了基本飞行,还进行了一系列任务和认知结构的评估。我们结果的一些方面指出“锁眼效应”不管在飞行还是在保持情景意识方面都可能导致不理想的表现。对比之下,已知数据没有为影响航迹跟踪表现的尺寸引起的“紧迫感”的作用提供清晰证据,尽管在其他方面有类似的证据(Boeckman &Wickens,2001),其间的差异还需要进一步调查。当前的证据表明观察到的压缩对紧迫感的影响是压缩轴在3D显示沿视线维度缩短的结果,而不是通过视域变化的压缩。
最后,一项有意义的发现需要进一步探究,大多数飞行员在试验过程中没有发现干扰小飞机,这与加入小飞机时使用的显示无关,也与他们之前试验中遇到干扰小飞机的经验无关(表5)。飞行员倾向遵循显示上的复飞航迹,而没有同外界进行仔细的交叉检查。重要的是,如果隧道被删简,而将航迹以及复飞引导都显示在HUD上则没有这种情况。特别是,Fadden et al.(2001)发现带航迹引导的HUD(与低头显示相比)没有降低正常进近中监视意外事件的敏感性。如果引进先进的令人信服的显示手段,就可以利用其高灵敏度研究这些因素怎样影响对外界的注意力分配(Wickens,Helleberg,&Xu,2002)。
致谢
感谢Ron Carbonari,Jonathan Sivier和Roger Marsh对本模拟试验开发的宝贵支持。
参考文献
Beringer,D.B.(2000).Development of highway-in-the-sky displays for flight-path guidance:History,performance,results,guidelines.Proceedings of the IEA 2000/HFES 2000Congress.Santa Monica,CA:Human Factors and Ergonomics Society.
Beringer,D.B.,Ball,J.(2001).General aviation pilot visual performance using conformal and nonconformal head-up and head-down highway-in-the-sky displays.Proceedings of the 11th International Symposium on Aviation Psychology.Columbus,OH:The Ohio State University.
Boeckman,K.J.,Wickens,C.D.(2001).The resolution and performance effects of three-dimensional display rotation on local guidance and spatial awareness measures(Technical Report ARL-01-4/NASA-01-3).Savoy,IL:University of Illinois,Aviation Research Laboratory.
Comstock,J.R.,Jr.,Glabb,L.J.,Prinzel,L.J.,Elliot,D.M.(2001).Can effective synthetic vision system displays be implemented on limited size display spaces?Proceedings of the 11th International Symposium on Aviation Psychology.Columbus,OH:The Ohio State University.
Doherty,S.M.,Wickens,C.D.(2001).Effects of preview,prediction,frame of reference,and display gain in tunnel-in-the-sky displays.Proceedings of the 11th International Symposium on Aviation Psychology.Columbus,OH:The Ohio State University.
Endsley,M.R.(1995).Toward a theory of situation awareness in dynamic systems.Human Factors,37(1),85-104.
Fadden,S.,Ververs,P.M.,Wickens,C.D.(2001).Pathway HUDS:Are they viable?Human Factors,43(2),173-193.
Glaab,L.J.&Takallu,M.A.(2002).Preliminary effect of synthetic vision systems displays to reduce low-visibility loss of control and controlled flight into terrain accidents(NASA Technical Report 2002-01-1550).NASA Langley Research Center.
Haskell,I.D.&Wickens,C.D.(1993).Two-and three-dimensional displays for aviation:A theoretical and empirical comparison.International Journal of Aviation Psychology,3(2),87-109.
Hofer,E.F.,Braune,R.J.,Boucek,G.P.,Pfaff,T.A.(2000).Attention switching between near and far domains:An exploratory study of pilots'attention switching with head-up and head-down tactical displays in simulated flight operations(D6-36668).Seattle,WA:The Boeing Commercial Airplane Co.
Kroft,P.,Wickens,C.D.(2001).The display of multiple geographical data bases:Implications of visual attention(Technical Report ARL-01-2/NASA-01-2).Savoy,IL:University of Illinois,Aviation Research Lab.
Kroft,P.D.,Wickens,C.D.(2003).Displaying multi-domain graphical database information:An evaluation of scanning,clutter,display size,and user interactivity.Information Design Journal.
McGreevy,M.W.,Ellis,S.R.(1986).The effect of perspective geometry on judged direction in spatial information instruments.Human Factors,28,439-456.
Olmos,O.,Wickens,C.D.,Chudy,A.(2000).Tactical displays for combat awareness:An examination of dimensionality and frame of reference concepts and the application of cognitive engineering.The International Journal of Aviation Psychology,10(3),247-271.
Onstott,E.E.(1976).Task interference in multi axis stabilization.Proceedings of the 12th Annual Conference on Manual Control(NASA TMX-73).Washington,DC:US Government Printing Office.
Podczerwinski,E.S.,Wickens,C.D.,Alexander,A.L.(2001).Exploring the“out of sight,out of mind”phenomenon in dynamic settings across electronic map displays(Technical Report ARL-01-8/NASA-01-4).Savoy,IL:University of Illinois,Aviation Research Lab.
Prinzel,L.J.,Kramer,L.J.,Comstock,J.R.,Bailey,R.W.,Hughes,M.F.,Parrish,R.V.(2002).NASA synthetic vision EGE flight test.In Proceedings of the 45th Annual Meeting of the Human Factors and Ergonomics Society(pp.135-139).Santa Monica,CA:HFES.
Scott,W.B.(2001,October 29).Synthetic vision systems:Ready for prime time?Aviation Week &Space Technology,78-80.
Stark,J.M.,Comstock,J.R.,Jr.,Prinzel,L.J.,Burdette,D.W.,Scerbo,M.W.(2001).A preliminary examination of situation awareness and pilot performance in a synthetic vision environment.Proceedings of the 45th Annual Meeting of the Human Factors &Ergonomics Society(pp.40-43).Santa Monica,CA:Human Factors and Ergonomics Society.
Ververs,P.M.,Wickens,C.D.(1998).Head-up displays:Effects of clutter,display intensity,and display location on pilot performance.The International Journal of Aviation Psychology,8(4),377-403.
Vidulich,M.A.,Wickens,C.D.(1986).Causes of dissociation between subjective workload measures and performance.Applied Ergonomics,17,291-296.
Wickens,C.D.(1986).The effects of control dynamics on performance.In K.Boff,L.Kaufman,&J.Thomas(Eds.),Handbook of perception and performance(vol.II,pp.39-60).New York:Wiley.
Wickens,C.D.(1997).Attentional issues in head-up displays.In D.Harris(Ed.),Engineering psychology and cognitive ergonomics:Transportation systems,Vol.1(pp.3-21).
Aldershot,UK:Ashgate Publishing Ltd.
Wickens,C.D.(2000a).The tradeoff of design for routine and unexpected performance:Implications of situation awareness.In M.R.Endsley &D.J.Garland(Eds.),Situation awareness analysis and measurement(pp.211-225).Mahwah,NJ:Lawrence Erlbaum.
Wickens,C.D.(2000b).Human factors in vector map design:The importance of task-display dependence.Journal of Navigation,53(1),54-67.
Wickens,C.D.(2000c).The when and how of using 2-D and 3-D displays for operational tasks.Proceedings of the IEA2000/HFES2000Congress(pp.3-403-3-406).Santa Monica,CA:Human Factors and Ergonomics Society.
Wickens,C.D.(2003).Aviation displays.In P.Tsang &M.Vidulich(Eds.),Principles and practices of aviation psychology(pp.147-199).Mahwah,NJ:Lawrence Erlbaum Publishers.
Wickens,C.D.,Gempler,K.,Morphew,M.E.(2000).Workload and reliability of predictor displays in aircraft traffic avoidance.Transportation Human Factors Journal,2(2),99-126.
Wickens,C.D.,Helleberg,J.,Xu,X.(2002).Pilot maneuver choice and workload in free flight.Human Factors,44(2),171-188.
Wickens,C.D.,Liang,C.C.,Prevett,T.,Olmos,O.(1996).Electronic maps for terminal area navigation:Effects of frame of reference and dimensionality.The International Journal of Aviation Psychology,6(3),241-271.
Wickens,C.D.,Long,J.(1995).Object versus space-based models of visual attention:Implications for the design of head-up displays.Journal of Experimental Psychology:Applied,1(3),179-193.
Wickens,C.D.,Prevett,T.T.(1995).Exploring the dimensions of egocentricity in aircraft navigation displays:Influences on local guidance and global situation awareness.Journal of Experimental Psychology:Applied,1(2),110-135.
Wickens,C.D.,Thomas,L.C.,Young,R.(2000).Frames of reference for the display of battlefield information:Judgment-display dependencies.Human Factors,42(4),660-675.
Wickens,C.D.,Todd,S.,Seidler,K.(1989).Three-dimensional displays:Perception,implementation,and applications(Technical Report ARL-89-11/CSERIAC-89-1).Savoy,IL:University of Illinois,Aviation Research Laboratory(also CSERIAC SOAR 89-001,Crew System Ergonomics Information Analysis Center,Wright-Patterson AFB,OH,December).
Wickens,C.D.Xu,X.,Helleberg,J.,Marsh,R.(2001).Pilot visual workload and task management in freeflight:A model of visual scanning.Proceedings of the 11th International Symposium on Aviation Psychology.Columbus,OH:Dept.of Aerospace Engineering,Applied Mechanics,and Aviation,Ohio State University.
Williams,K.W.(2000).Impact of aviation highway-in-the-sky displays on pilot situation awareness.Proceedings of the IEA2000/HFES2000Congress.Santa Monica,CA:Human Factors and Ergonomics Society.
Woods,D.D.(1984).Visual momentum:A concept to improve the cognitive coupling of person and computer.International Journal of Man-Machine Studies,21,229-244.
Yeh,Y.Y.,&Wickens,C.D.(1988).Dissociation of performance and subjective measures of workload.Human Factors,30,111-120.
Yeh,M.,&Wickens,C.D.(2001).Attentional filtering in the design of electronic map displays:A comparison of color-coding,intensity coding,and decluttering techniques.Human Factors,43(4),543-562.
附录A
主飞行显示及其航路引导:
工作负荷,表现和情景意识
这项试验的目的是研究飞行和导航表现,得到先进的飞行显示理念的支持并呈现在主飞行显示上。你会先飞行一低逼真度以电脑为基础的飞行模拟器,使用该显示,同时报告你看见的任何呈现的空中交通,并保持对任何接近飞行路径的地面危险的警惕。总共参与时间为2至3小时。
试验中没有已知的风险或超出普通生活引起身体上的不适应,参与者每小时领取8美元的报酬。任何时候都可以停止继续试验,但仍可以得到已完成的参与试验时间的报酬。你参与的这项研究将支持飞机设计的更好发展,以及更好地理解飞行员的表现如何可以通过不同显示而受益。我们非常感谢您的参与。如果您有任何进一步的问题,请在试验过程中随时告诉试验者,或打电话给Wickens博士。如果您对研究对象的权益问题存有任何质疑,请联系大学机构审查委员会。
同意声明书
我承认,我参与这个试验是完全自愿的,我可以随时退出试验。我了解这个一般科研性试验的目的,在参与试验的时间内每小时将得到8美元的补偿。如果我在试验结束前退出,我会收到我参与时间内的全部酬金。我确信我的试验数据将秘密保存,而且我将有这份声明书的副本。
参与者签名:________日期:____
试验者签名:________日期:____
附录B
试问卷
1.总飞行小时(大约)________
2.总共的仪表飞行小时(相当的和实际的)________
3.评定等级____________
4.年龄______
5.性别______
附录C
试验说明
简介
未来飞机的提议显示系统引用许多与平视显示(HUD)、3D显示、计算机生成图像(CGI)、传感器图像和卫星导航相关联的新技术。这种系统设计的目的是提高安全性,通过减少可控飞行撞地(CFIT),跑道侵入以及空中相撞事故和遭遇恶劣天气,同时通过提高低能见度下起飞和着陆能力提高“生产率”。具体来说,这些显示器设想能够为跑道提供改进的仪表飞行航路如曲线进近航路,这些跑道以前在传统的导航设备下是“不适合着陆的(unlanable)”。此外,这类引导可以在跑道突然变得不安全或不可用时提供自动复飞航路。国家航空和宇航局(NASA)兰利(Langley)研究院要求我们帮助确定这类显示的最佳形式,能够最好地实现这些安全和高效的联合目标。
任务概述
在这项研究中,将要求你准确地飞行若干的曲线阶梯下降进近,包含各种航向和高度变化,引导用或者高强度空中隧道,低强度空中隧道或者“引导飞机”(follow-me-aircraft)表示。所谓的“综合视觉显示”将覆盖3D地形背景,对外界也可以进行模拟。显示屏右上角的小2D电子地图将描述导航显示。如同正常目视气象条件(VMC)飞行,你应同时保持对外部世界和综合视觉系统显示的警觉。将空速固定为100节,直到最后进场航段。飞行将会被三种一般事件中断。
1.呈现在显示边缘的周期信号需要立即通过按下左侧的通话按钮进行确认。一旦按下按钮,这些信号将消失。
2.定期空中危险在计算机生成的地形和天空图像背景上可见(综合视觉显示),要求探测后尽快按左通话按钮进行确认,并报告它们相对于自己飞机的真实方位和俯仰角(例如,“traffic2:00high”)。只有在即将发生空中碰撞危险的事件中才可偏离航路。
3.置于整个计算机生成图像的定期天线在退出你的前视角后,将通过信息箱进行探测,要求指出天线是在航路右侧还是在左侧,以及它是否高出,持平或低于自己飞机(相对高度)。将航路中心作为相对高度判断的基准。一旦作出反应后,按照要求按下右侧的通话按钮。按键后,该信息箱将在屏幕上保持5秒。
任务的主要目标是尽可能高效率地在航路上飞行,同时对上述三类事件作出回应,如果允许的话完成跑道着陆。在两条隧道显示下,航路由隧道确定,因此,你应尽力在隧道内飞行。在FMA的情况下,没有可见的隧道,但FMA大约在你的飞机前面约840英尺处,一直处于目前看不见的隧道中心。因此,你应该跟随这架飞机,保持你飞机的预测符号与FMA对正。试验开始前,将进行两次练习试验(一次隧道飞行,一次FMA飞行),在此期间试验人员将回答你可能提出的所有问题。然后,你将完成6次试验飞行,按照试验者说明每一显示类型有2次飞行。每次试验将持续8至10分钟。每次试验结束时将短停,以便按照NASA-TLX量表评估你的心理负荷,量表有说明。记住双手操纵驾驶杆,当前面描述的事件发生时按下相应的通话按钮。
附录D
SVS符号说明
(由试验者阅读并与显示的硬拷贝图像同时使用)
显示形式
所有显示。全部显示形式覆盖在计算机生成的约塞米蒂国家公园地形背景上。显示屏右上角的小2D电子地图呈现导航显示,其路径用绿线表示。你的飞机(ownship)在插入航图上由一个粉红色箭头,在SVS显示中由被称为“瞄准线”的绿色“W”表示。白色的预测标志代表领先于自己飞机5秒钟的预计位置。高度和空速分别呈现在屏幕左右两侧的圆形标度盘内。航向用横过屏幕中心的水平线指示,而你自己飞机的确切航向显示在瞄准线上方。垂直速度通过瞄准仪右侧的带子显示。
可能中断您飞行的3个一般事件包括:显示边缘的周期信号,交通飞机(小飞机),和探测天线信息箱。
空中隧道(低强度和高强度)。空中隧道显示显现空中一系列相互联结的方框形构成一绿色航路。白色滑动框跟踪航路领先飞机5秒钟。低强度隧道有些透明,但仍然很容易看见。高强度隧道则完全不透明,滑动框线条的厚度相当于低强度隧道的两倍。
引导飞机(FMA)。FMA是1个三维透视符号,与预测标志配合使用。FMA是红色的,与白色的预测标志颜色相对照。通过将预测标志置于FMA上,使自己的飞机维持在航路中心位置。
附录E
NASA任务负荷指数:工作负荷等级量表
心理要求
低________________高
身体要求
低________________高
时间压力
低________________高
自己表现
差________________好
受挫程度
低________________高
精神努力
低________________高
附录F
试验操作说明
简介
未来飞机的提议显示系统引用许多与平视显示(HUD),3D显示,计算机生成图像(CGI),传感器图像和卫星导航相关的新技术。这种系统设计的目的是提高安全性,通过减少可控飞行撞地(CFIT),跑道侵入以及空中相撞事故和遭遇恶劣天气,同时通过提高低能见度下起飞和着陆能力提高“生产率”。具体来说,这些显示器设想能够为跑道提供改进的仪表飞行航路,如曲线进近航路,这些跑道以前在传统的导航设备下是“不适合着陆的(unlanable)”。此外,这类导航在跑道突然变得不安全或不可用时可以提供自动复飞航路。国家航空和宇航局(NASA)兰利(Langley)研究中心要求我们帮助确定这类显示的最佳形式,能够最好地实现安全和高效这些联合的目标。
任务概述
在这项研究中,将要求你准确地飞行若干曲线阶梯下降进近,包含各种航向和高度变化,或通过高强度空中隧道,低强度空中隧道或通过“引导飞机”(follow-me-aircraft)表示进行航路。所谓的“综合视觉显示”将覆盖3D地形背景,对外界也可以进行模拟。显示屏右上角的小2D电子地图将描述导航显示。在正常目视飞行气象条件(VMC)下飞行,应同时保持对外部世界以及综合视觉系统显示警觉性。将空速固定为100节,直到最后进场航段。航程将会被3种一般类事件中断。
4.呈现在显示边缘的周期信号需要立即通过按下左侧的通话按钮进行确认。一旦按下按钮,这些信号将消失。
5.定期空中危险在计算机生成的地形和天空图像背景上可见(综合视觉显示),要求探测到后尽通过按左通话按钮进行确认,并报告它们相对于自己飞机的真实方位和俯仰角(例如,“traffic2:00high”)。只有在即将发生空中碰撞危险的事件中才可偏离航路。
6.定期模拟暂停导致SVS显示和外界消隐。暂停过程中你将被问及一系列问题,这些问题需要或是口头的或是手动的答复。第1个问题总是需要手动答复,通过使用位于驾驶杆左臂上的“瓷帽(china hat)”来定位一个白球,将白球放到外部世界屏幕被质疑的位置上,而第2个要求口头答复。被质疑位置总是包括涉及远离或者刚超出飞行员前视景的一小块彩色陆地。一旦白球放置到了他们认为的地形位置上,按压左侧通话按钮来继续下一个问题。第2个问题回答后,按下右侧通话按钮继续试验飞行。在模拟暂停过程中请不要改变操纵。
任务的主要目标是尽可能高效率地在航路上飞行,同时对上述3类事件作出回应,如果允许的话完成跑道着陆。SVS显示将根据不同的视域(FOV,30°和60°)和显示尺寸(小和大)进行配置。试验开始前,将进行两次练习试验,在此期间试验人员将回答你可能提出的所有问题。然后,你将完成一系列的8次飞行试验,根据试验人员的描述每一种FOV与显示尺寸组合都飞行两次。每个方案都将以目视气象条件(VMC)飞行约1分钟开始,再出现大雾以模拟仪表气象条件(IMC)。开始的这1分钟用来对SVS显示与外界进行校对,因为不同的FOV会将物体表示在不同位置,而不是它们在外面世界中的真实位置。大雾在你转向最后进场阶段时将消除。每次试验将持续8至10分钟。每次试验结束时将有短停,以便用NASA-TLX量表评估你的心理负荷。记住双手操纵驾驶杆,当前面描述的事件发生时按下相应的通话按钮。
附录G
SVS符号说明
(由试验者阅读并与显示的硬拷贝图像同时使用)
(任何斜体和括号内的内容表示试验人员要将其在显示图片上指出)
显示形式
所有显示(使用大显示尺寸60度FOV指出你所有这些对象形容他们)全部显示形式覆盖在计算机生成的约塞米蒂国家公园地形背景上。显示右上角的小2D电子地图表明导航显示,其路径用绿线表示(指出导航显示和绿色航路)。空中隧道显示显现空中一系列的联结方框形成一个绿色航路。白色滑动框遵循航路领先飞机5秒钟(指出白框)。低强度隧道有点透明,但仍然很容易看见。你的飞机(ownship)在插入航图上由一个粉红色箭头,在SVS显示中,由被称为“瞄准仪”的绿色“W”表示(在SVS和插入行图上指出飞机)。白色的预测仪代表领先于自己飞机5秒钟的预计位置(指出预测仪)。高度和空速分别呈现在屏幕的左右两侧的圆形标度盘内(指出圆形标度盘)。航向通过横跨屏幕中心水平线指示,而自己飞机的确切航向显示在校准仪上方(指出水平线和航向)。垂直速度通过瞄准仪右侧的带子显示(指出垂直速度显示)。
在此提醒一下,可能中断您飞行的3种一般事件包括:显示边缘的周期信号(指出正方形),交通飞机(小飞机)和模拟暂停来手动和口头答复问题。每当你在显示屏上看见方形或小飞机,你就按左侧的通话按钮,然后口头说出相对于自己飞机的方位和高度(例如,“交通2:00高”)。在模拟暂停阶段,整个显示器和外面的世界将变成黑色。第1个问题总是关于或者远离或者刚超出飞行员前视域的一彩色块(指出彩色块)。同样,你将被要求通过驾驶杆上的“瓷帽”确定白球的位置,在这里你确信彩色块就在外界环境中。
根据不同的视域(指出大显示30度和大显示60度FOV)和显示尺寸(指出至60度大显示和小显示尺寸)配置SVS显示。视域决定显示上描述物的多少。30度FOV提供1个非常狭窄的世界视野,而60度FOV提供一个更广阔的视角。屏幕尺寸仅确定SVS显示在屏幕上占用的面积大小。任一情况下描述的信息都是等量的,但实际显示尺寸或小或大。
还有其他问题吗?
【注释】
[1]*1in(英寸)=2.54cm
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。











