



3.2.3 基本关系式
典型的激光扫描测距系统由激光测距单元、光机扫描镜、控制和处理单元组成。测距单元由激光发射器和光电子接收器组成。激光发射和接收窗口孔径直径大小一般为8~15cm,激光发射和接收共用一条光路,以确保被激光束照射的物体表面点都在光电子接收器的视场(Field of View,FOV)里。瞬时视场角(Instantaneous Field of View,IFOV)由发射激光光束的发散角γ定义。通常,IFOV的大小为0.3~2mrad(Wehr,et al,1999)。从理论上讲,IFOV的大小取决于光的衍射(diffraction of light),因此,IFOV是发射孔径D和激光波长λ的函数,对于空间相干光,由光的衍射产生的IFOV为:
(1)激光脚点光斑大小
由图3-4可知,地面上瞬时激光脚点的光斑大小f不仅取决于飞行高度H、激光光束发散角γ,而且还取决于地形坡度α、瞬时扫描角θi。
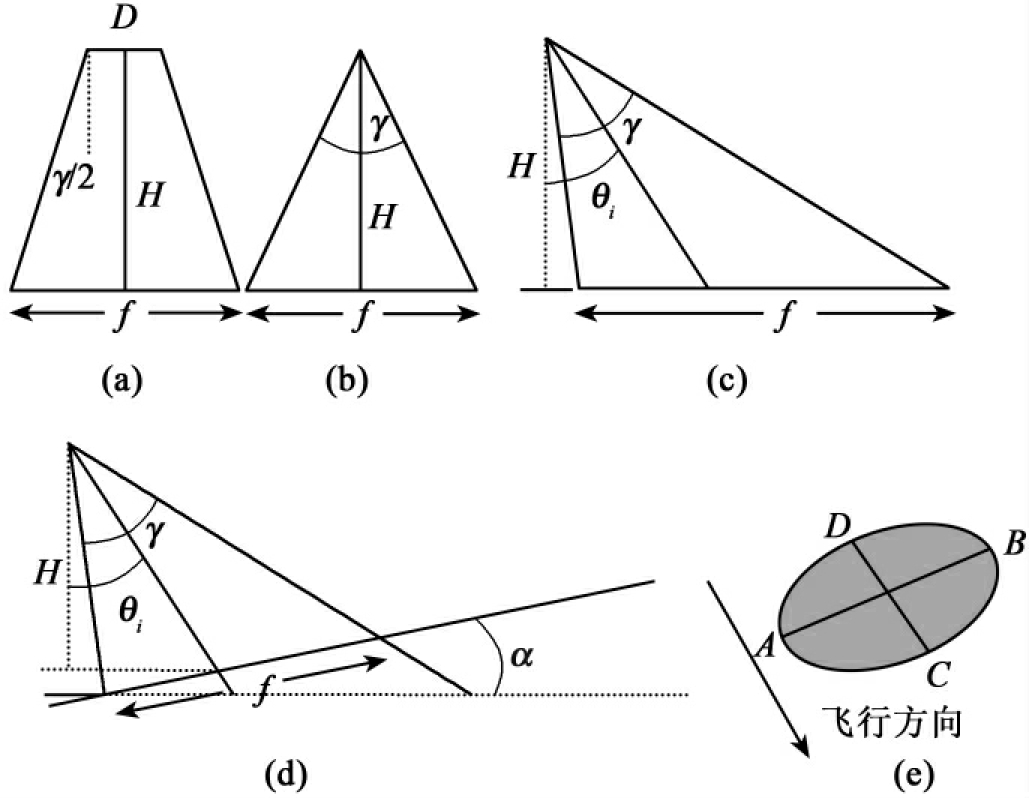
图3-4 激光束在地面上所形成的激光脚点的光斑大小示意图
当激光束垂直照射到水平表面时(见图3-4(a)),光斑直径为:
f=D+2Htan(γ/2) (3.4)
由于D一般较小(10~15cm),由图3-4(b)可得:
f≈2Htan(γ/2) (3.5)
激光光束发散角γ是一个小角度值,认为γ/2≈tan(γ/2),所以,
f≈Hγ (3.6)
比如,当H=1000m,γ=1mrad时,f=1.0m。
当飞机处于水平状态,激光束偏离垂直零位置θi(瞬时扫描角)照射到水平表面时(见图3-4(c)),光斑大小(航线垂直方向直径AB,见图3-4(e))为:
f=H(tan(θi+γ/2)-tan(θi-γ/2)) (3.7)
当飞机处于水平状态,瞬时扫描角为θi,激光束照射到坡度为α的倾斜表面,坡向与航线方向垂直时(见图3-4(d)),光斑大小(航线垂直方向直径AB,见图3-4(e))为:

例如,当坡度α=+45°(坡平面“迎”激光束方向),瞬时扫描角θi=15°,航高H=1000m,激光光束发散角γ=1mrad时,可求得f≈1.2m;如果坡度α=-45°(坡平面远离激光束方向),那么可求得f≈1.46m。而航线方向光斑直径CD(见图3-4(e))仍然为f≈Hγ。
(2)激光回波信号的多值性
激光脉冲射到物体表面产生漫反射后,有其中一部分的激光脉冲被反射回去。激光光斑有一定的半径大小,可以想象,同一束激光脉冲可能有多个回波信号被接收系统所接收。特别是当激光束穿过植被时,同束激光可能碰到树叶、树枝或树干而反射回去,还有可能碰到地面而反射回去并由系统接收,它们到达接收系统的时刻都不相同。有些系统只能记录最先到达的脉冲信号,有些系统可以记录最先和最后到达的脉冲信号,少数系统甚至可记录多次不同时刻到达的同一束发射激光的回波信号。利用激光回波信号的多值性特点,能设计出用于测定森林植被参数的机载激光雷达测量系统,如第1章提到的LVIS系统。当然,系统只能以一定的距离分辨率记录同束激光的不同回波信号,如TopoSys系统所能区分的回波信号间的最小距离为60cm,有时称之为测距的不确定性。在现实世界里,有许多地物的地面高度要小于60cm,当同束激光的一部分能量被这类地物反射回去,而有部分能量被地面反射回去时,两次回波脉冲信号相隔太近,以至系统无法区分。也就是说,如果系统记录了有这类地物反射回去的回波信号,就无法同时记录由地面反射回去的回波信号,反之亦然(Friedlaender H,et al,2000)。
(3)扫描带宽(Swath Width)
由图3-3易知,当θi取得最大值θ/2时,求得扫描带宽为:
SW=2Htan(θ/2)> (3.9)
式中,θ为系统扫描角,是一个常数,对于给定的系统,扫描带宽只同飞行高度有关。对于线扫描方式来讲,如果飞机匀速平稳飞行,那么扫描激光脚点系列在地面上应该形成如图3-5所示的“Z”字形扫描线。
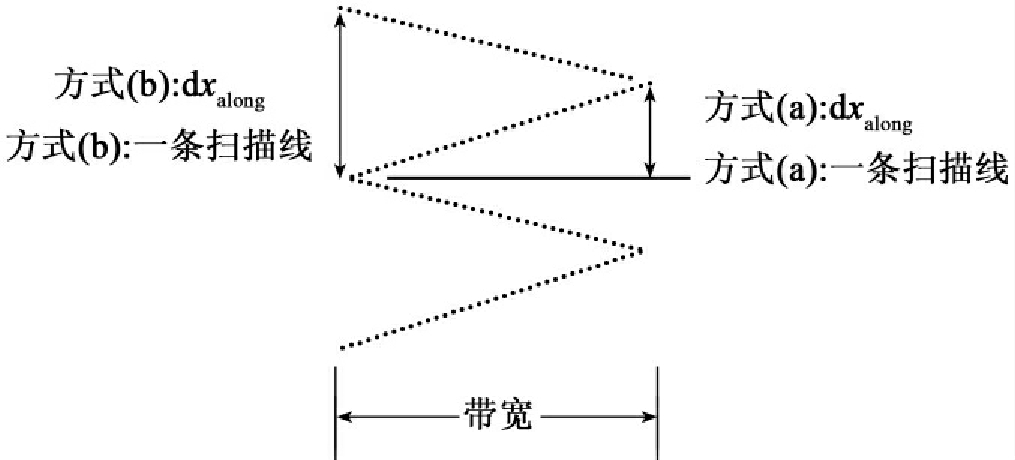
图3-5 “Z”字形扫描激光脚点在地面的扫描轨迹
例如,当航高H=1000m,系统扫描角θ=40°,可计算带宽SW=728m。
(4)激光脚点数N及激光脚点间距(Posting Space):dxalong; dxacross
所谓的激光脚点数就是每条扫描线的激光脚点数,它与飞行高度和带宽无关。N是激光脉冲发射重复频率(每秒发射多少次激光脉冲)和激光扫描系统的扫描频率(每秒扫描多少条扫描线)的函数。
N=F/fscan (3.10)
式中,F为激光脉冲发射的重复频率;fscan为扫描频率。当取F= 10kHz,fscan=20Hz,那么N=500个。
沿航向方向的激光脚点的最大间距(纵向)dxalong(见图3-5)为:
dxalong=V/fscan (3.11)
dxalong也同飞行高度无关,只同飞行速度和扫描频率有关。
当取飞行速度V=60m/s,fscan=20Hz,那么dxalong=3m,从图3-5能看出dxalong是变化的。
同一扫描线上相邻激光脚点间的间距(横向)dxacross(图3-5)为:
dxacross=SW/N> (3.12)
当取带宽SW=600m,N=500,那么dxacross=1.2m,从图3-5能看出dxacross也可取2.4m,这取决于扫描线的定义方式,如果定义激光束从最左端经过零点位置扫到最右边为一条扫描线(见图3-5中方式(a)),那么dxacross=1.2m;如果定义激光束从最左端经过零点位置扫到最右边,再从最右边经过零点位置又回到最左边为一条扫描线(见图3-5中方式(b)),那么dxacross=2.4m。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。











