



8.3.1 三维空间数据模型
数据模型是现实世界向数字世界转换的桥梁。信息系统的数据模型确定了信息系统的数据结构和对数据可施行的操作。与二维数据模型一样,它可以分为如下类别:
1.三维体元填充模型
将三维空间物体抽象为三维体元的集合。它表达点状物体用包含该点的一个体元;表达线状物体用一串沿一个方向(方向可以弯曲)延伸的相邻体元的集合;表达面状物体用一片沿两个方向延伸(方向可以弯曲)的相邻体元的集合;表达体状物体用一堆沿三个方向延伸(方向可以弯曲)的相邻体元的集合。三维体元有正方体体元、规则长方体体元、不规则长方体体元、不规则六面体体元、四面体体元等。
据此三维体元填充模型可细分为以下几种:
1)三维栅格模型
三维体元填充模型中最简单并最经常使用的是等边长的正方体体元(如同二维中的等边长正方形像元)。它是二维中的栅格模型在三维中的推广,因而被称为三维栅格模型。也称为晶胞模型或栅格模型。栅格模型的优势是操作算法简单,尤其是未经压缩的标准体元的数据结构简单、标准和通用(二维中标准栅格结构的通用性最好)。对体内的不均一性具有一定的表达能力,叠加分析、缓冲区分析都很容易实现。不足之处是对空间目标的表达不精确,数据量巨大。当对空间目标表达的精度提高时,数据量以3次幂的指数级提高。
2)线性八叉树模型
为了克服等边长立方体数据量巨大的弊端,提出了线性八叉树模型。它是由二维表示方法四叉树法演化而来的。八叉树模型将一个立方体三维空间平分为八个卦限,如果每一个卦限内属于同一物体就不再细分,否则将再细分为八个卦限,直到每个体元内都属于同一物体或达到一定的限差为止。它实质上是边长可对半细分的立方体填充模型可视为三维栅格模型的变体。
3)四面体体元填充模型
这种方法的思想与TIN的思想是一致的,即用不规则四面体(Tetrahedron)作为描述空间实体的基本体元,把任意一个三维空间实体剖分成一系列邻接但不重叠的不规则四面体(如同二维中对平面进行三角剖分)。用四面体的集合来表达空间物体,其特点是能够根据三维空间采样点的坐标值有效地实现三维插值运算及图形的可视化功能。四面体间的邻接关系可以反映空间实体间的某些拓扑关系。
2.结构实体几何模型(CSG,Construction Solid Geometry)
CSG表示的基本概念是由Voelcker和Requicha提出的。它的基本思想是:将简单的几何形体(通常称为体素,如立方体、球体、圆柱体、圆锥体等)通过正则的集合运算(并、交、差)和刚体的几何变换(平移、旋转)形成一棵有序的二叉树,被称之为CSG树,其具体定义为:
(1)树中的叶结点对应于一个体元并记录体元的基本定义参数。
(2)树的根结点和中间结点对应于一个集合运算符。
(3)一棵树以根结点作为查询和操作的基本单元,它对应于一个目标名。然后以此表示复杂形体,树的根节点为体元或刚体运动的变换参数,分叉节点是正则的集合操作(并、交、差)或是刚体的几何变换(平移、旋转)。这种操作或变换只对紧接着的子节点(子形体)起作用。每棵子树(非变换时子节点)表示了它下面两个结点的组合及交换结果,树根表示整个形体。
3.矢量模型
它是二维中的点、线、面矢量模型在三维中的推广。它将三维空间中的物体抽象为三维空间中的点、线、面、体四种基本几何元素,然后以这四种基本几何元素的集合来构造更复杂的对象。曲线以起点、终点来限定其边界,以一组型值点来限定其形状;曲面以一个外边界环和若干内边界环来限定其边界,以一组型值曲线来限定其形状;体以一组曲面来限定其边界和形状。
矢量模型也常称之为边界模型。前面介绍的体元填充模型中很难精确表达三维的线状物体、面状物体和体状物体的不规则边界,而用矢量模型则能精确地表达。矢量模型的优点是表达精确、数据量小,并能直观地表达空间几何元素间的拓扑关系,因而空间查询、拓扑查询。邻接性分析、网络分析的能力较强。不足之处是操作算法较复杂,表达体内的不均一性的能力较差,叠加分析实现较为困难。在近十几年里不断有学者从GIS角度研究三维矢量模型:
(1)M.Molennar(1992)、D.Fritsch(1996)首先在原二维拓扑数据结构的基础上,定义了结点(Node)、弧(Arc)、边(Edge)和面(Face)四种几何元素之间的拓扑关系及其与点(Point)、线(Line)、面(Surface)和体(Solid)四种几何目标之间的拓扑关系,并显式地表达点和体、线和体、点和面、线和面间的“之内”(is-in)、“之上”(is-on)等拓扑关系,提出了一种基于三维矢量图的形式化数据结构(3D FDS),如图8.3所示。这些研究工作的主要问题之一,是只考虑了空间实体表面的划分和边界表达,没有考虑空间实体的内部结构,仅适于表达诸如建筑物等形状规则的简单空间实体,难以表达地质及环境领域中没有规则边界的复杂三维空间实体(诸如煤层之类);问题之二是没有对三维空间实体及实体之间拓扑关系进行严格的定义及形式化描述,缺乏拓扑关系的完备性与独立性的证明;问题之三是由于显式地存储“之内”、“之上”等拓扑关系,操作不便,影响系统时空效率。
(2)Pilouk et al.(1994)、Oosterom et al.(1995)、Xiaoyong Chen et al.(1995)、Tempfli et al.(1996)等学者对基于四面体的三维矢量数据模型进行了研究,将不规则四面体作为描述空间实体的基本体素,把任意一个三维空间实体剖分成一系列邻接但不重叠的不规则四面体,通过四面体间的邻接关系来反映空间实体间的某些拓扑关系,如图8.4所示。其特点是能够根据三维空间采样点的坐标值,有效地实现插值运算及图形的可视化功能,能快速进行几何和逻辑变换,但仅考虑了空间实体内部结构的划分,没有考虑空间实体的表面形态,难以用于表达三维面状目标及线状目标。此外,数据精度的增加和数据量的急剧增大,要求设备存储量较大,会影响系统的查询速度,因而对设备的存储量要求也更大。

图8.3 3D FDS数据结构
(3)陈军、郭薇等对三维矢量模型的几何元素间的拓扑关系进行了研究。根据分析角度不同,其主要分为伪流形、k-单纯形(k-Simplex)等几种方法,下面简单介绍k-单纯形方法,它通过描述k-单纯形与三维空间实体的ER(实体联系)关系来表达三维矢量模型各种几何元素的关系。三维空间实体可分成点状实体(Point Entity)、线状实体(Line Entity)、面状实体(Surface Entity)和体状实体(Body Entity)。任意一个三维空间实体都是一个可定向的n维伪流形(n-pseudomanifold)(0≤n≤3),它对应于一个具有良好单纯形结构的n-单纯复形(n-complex),在几何上可剖分成若干个维数小于或等于它的、连通但不相互重叠的k-单纯形(k-simplex),(k≤n)。0-单纯形(0-simplex)、1-单纯形(1-simplex)、2-单纯形(2-simplex)、3-单纯形(3-simplex)和平面(face)是组成三维空间实体的五种基本几何元素,其中平面是所有具有相同法线矢量的2-单纯形的集合,用于减少数据冗余及更有效地表达具有规则边界的面状实体和体状实体。三维空间实体分别由不同维数的k-单纯形组成:点状实体是一个零维空间目标,只有空间位置而无空间扩展,它对应于具有一个顶点的0-单纯形,其空间位置由一个空间坐标[Xi,Yi,Zi]表达,0-单纯形是1-单纯形的边界;线状实体可以是一个封闭曲线,也可以是具有多个分支的曲线,作为一种1-单纯复形,由有限多个连通及有向1-单纯形所组成,且这些1-单纯形不能自身交叉或与其他1-单纯形相交,与线状实体形成N∶1的关系;1-单纯形作为2-单纯形及平面的边界,与2-单纯形之间有着3∶1的关系,与平面有着N∶1的关系。面状实体是一个二维空间目标,可以剖分成有限多个2-单纯形(2-simplex),且其上任意两个相邻的2-单纯形在其公共边上总是诱导出相反的序向,与面状实体具有N∶1的关系;任意一个体状实体均可以剖分成有限多个沿着其边界进行粘合的3-单纯形(3-simplex),且其上任意两个相邻的3-单纯形在其公共面上总是诱导出相反的序向。图8.5是这种顾及空间剖分的三维拓扑ER图。

图8.4 基于四面体的三维矢量数据模型
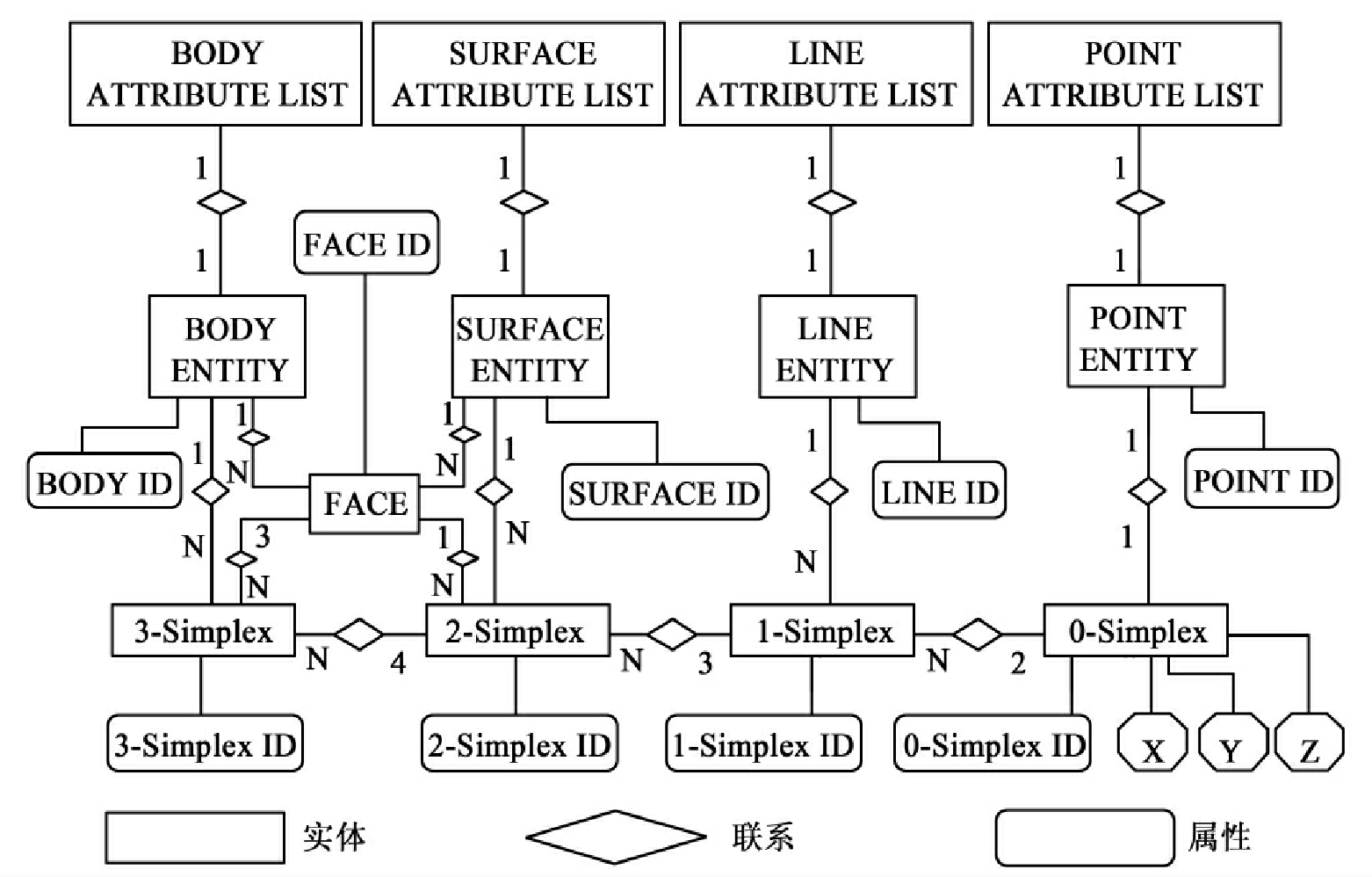
图8.5 顾及空间剖分的三维拓扑ER图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。










