



与航天器比美的潜海器
作者:让-皮埃尔·博笛(Jean-Pierre Petit)
译者:秦捷
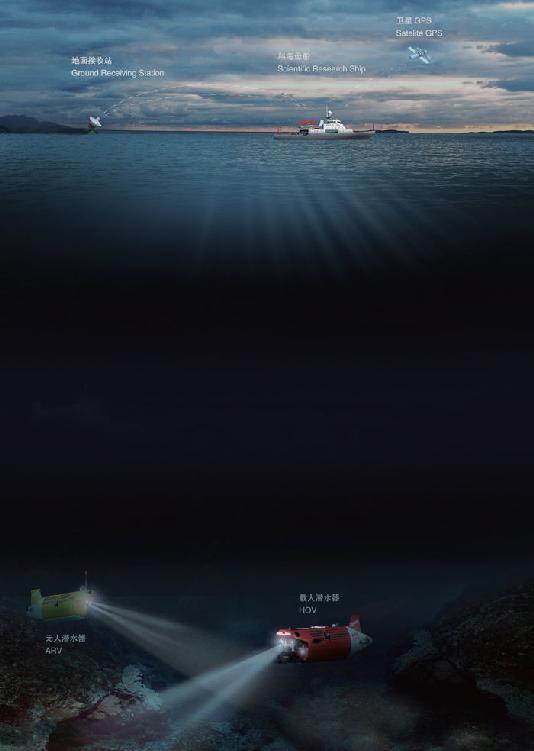
海洋占地球表面积的70%,至今为止人们只绘制了5%~10%的海底地图。这些海底地图是根据卫星数据、水深探测器数据等推测出的海底地貌,或者是根据板块结构绘制出的海底地形,作为地图仍不够精确详细。能够进行水下操作的装置——潜水器,为海洋研究提供了另一条途径。它不但可以用来绘制海底地形图,还对研究海底生态系统有着重要意义。
潜水器的先驱
人类很早就开始尝试着探索海底了。早在20世纪30年代,美国探险家威廉·贝勃(William Beebe)和奥蒂斯·波顿(Otis Burton)就乘坐着自己制造的潜水球(Bathysphere)下潜到海面下923米处进行了海底观测,他们的潜水球相当简单,就是一个金属球体,本身没有自行运动的能力。他们需要先用船把潜水球运到海上,再用金属缆绳牵引着它慢慢沉入海底,观测结束后还得靠缆绳把它拉上来。
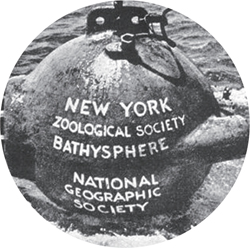
▲ 贝勃和波顿自制的潜水球
这个时期潜水球的主要技术难题是驾驶舱和缆绳的结实程度。30多年后,瑞士著名科学家、探险家奥古斯特·皮卡尔(Auguste Picard)[1]受到高空气球驾驶舱的启发,设计了一台水下气球艇(bathyscaphe),使用了可以保持气压的钢制驾驶舱,并配备了装有汽油[2]的浮力箱和大量沉重的钢块。水下气球艇可以凭借自身和钢块的重量下沉;返回时,只需将钢块逐步抛下,利用汽油的浮力就可以上浮。这大大减小了单靠缆绳上浮存在的风险。
1960年,皮卡尔的儿子雅克·皮卡尔(Jacques Picard)和美国海洋学家唐纳德·沃尔什(Don Walsh)驾驶着这台水下气球艇“的里雅斯特”号
(Trieste)进入马里亚纳海沟,创下10960米的世界最深下潜纪录。他们这次潜海持续了10小时,除了测试潜水艇的性能,还测试了深海处海水的温度、放射性等。正是在这次潜海中,他们观察到了海带和海蜇,证实深海并不是一个“死”的世界,也有生命存在。
虽然,与潜水球相比水下气球艇已经有了很大进步,但它无法在海底自行水平移动,只能下潜到一个地方,然后原地上浮,它能进行的科研活动非常有限。此外,这些潜水器本身的运输和操作也不方便,还经常受到海上天气条件的限制。

▲ “的里雅斯特”号水下气球艇
▲ 沃尔什和皮卡尔德搭乘“特里亚斯特”号潜水器,下潜到马里亚纳海沟的“挑战者深渊”
潜水器技术大跨进——“阿尔文”号
为了克服这些弱点,20世纪60年代后出现了新一代潜水器。它们配有电动马达,不仅可以自行下潜和上浮,还解决了水下水平移动的问题。
美国伍兹霍尔海洋研究所(WHOI)从20世纪60年代开始研制“阿尔文”号(Alvin)潜水器。和其他载人潜水器一样,主舱为三个人(一位驾驶员和两位科研人员)而设计,配有用于采集标本的机械臂、摄像机和照明设备。
“阿尔文”号潜水器属于载人潜水器,能够在水下6500米深处作业,目前已经成功下潜了4500多次。1966年,美国一架B52轰炸机和另一架KC135空中加油机相撞,轰炸机上的4枚氢弹中有3枚坠落在西班牙南部的一个小村落附近,另一枚落入地中海海底。美国海军出动38艘舰艇带着“阿尔文”号潜水器在该地区搜寻,几十天后,终于确定这颗氢弹落在了距离海岸8000米、深869米的地方。借助“阿尔文”号的机械臂,这枚失落的氢弹被成功打捞了出来。
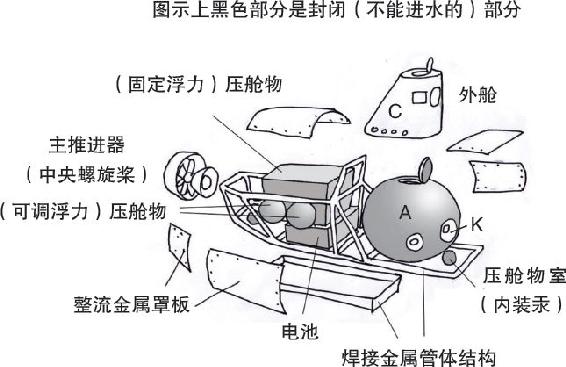
▲ 当运载船舰将潜水器运输到工作海面时。三位工作人员进入潜水器主舱(A),通过运载船上的轨道滑行到达船尾部,由缆绳固定,把潜水器送入水下。这时候外舱(C)部分开始有海水渗入,潜水器慢慢下沉,速度大约是1米/秒。达到目的地时,驾驶员启动水泵排出海水,使潜水器达到平稳状态,然后启动照明设备,在不同螺旋桨的推动下,潜水器行驶到准确地点。科研人员通过锥形舷窗(K)观察海底环境
▲ “阿尔文”号
除了海底捞炸弹,“阿尔文”号参与更多的工作是海洋研究,尤其是深海动物方面。科学家一般利用机械臂取样,放在标本篮里。此外,潜水器还配有一个“吸管”装置,当发现新的海底生物时,为了不弄伤脆弱的生命,可以利用这个“吸管”捕获生物样本。据统计,乘坐“阿尔文”号潜水器到深海研究的科学家共发表过2000多篇科学论文。1979年,“阿尔文”号前往大西洋中脊考察,人类首次发现了海底热液现象,并先后发现了生活在热液喷口附近400多种深海生物,有长达一米的红色管虫、无色螃蟹等!1984年,“阿尔文”号潜水器成功地参与了对“泰坦尼克”号沉船的考察。“阿尔文”号上的小型遥控机器人(Jason Junior)还进入沉船内部拍摄了清晰的图片和录像,这一事件也引发了公众对潜水器的关注。
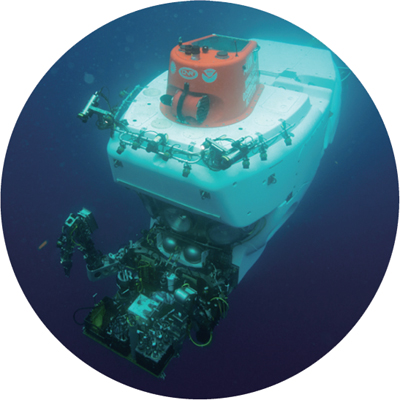
▲ 专用遥控操纵潜水器“小赫拉克勒斯”号

▲ “约翰逊海洋链环”号潜艇
潜水器的基本结构
从水下气球艇到今天的各类潜艇或潜水器,它们得以水下作业都离不开两个基本原理,就是阿基米德原理和帕斯卡定律。前者告诉我们一个物体在水中会受到向上的浮力,大小等同于该物体排开的水的重力;后者告诉我们如果一个密封容器内充满气体或液体,那么气体或液体受到的压力会等量地传递给容器。现代潜水器的结构大致相同,都包括以下4个部分:
耐压球状主舱:这是载人潜水器操作人员的活动空间;它必须耐压,并提供氧气、维持适宜温度。
技术辅助部分:蓄电池、电动马达、照明系统、机械臂、采样设备、通信设备等。
浮力筒:使潜水器在水下达到平衡状态。
压舱物:配置在潜水器的两端,通过调节海水的流入流出来控制潜水器的上下浮动。
针对不同的功能和需求,潜水器在设计上也有很大的不同。大型军用潜艇重视航行速度,所以呈流线型,以减小航行时的阻力;科研用潜水器则更注重灵活性,为了绘制详细的海底地图,潜水器进行360°拍照,于是设计者将汞(就是水银)泵入一端的压舱物中,从而使潜水器向这一端倾斜,获得所需拍摄角度。为什么是汞呢?因为汞的密度很高,为达到一定重量所需的体积更小,同时,汞是液态,它的流动性为操作带来了便利。
“海神”号水下机器人
与此同时,科研人员还在研究无人潜水器,也叫“水下机器人”,大致有两类:遥控潜水器(ROV)和自主潜水器(AUV)。遥控潜水器需要技术人员在母船上通过电缆或光纤遥控来执行任务;而自主潜水器可以独立在水下执行事先设定好的任务。
遥控潜水器使用的传统通讯缆线主要有两个弱点:
缆线比较粗,卷起来后又大又沉,所以不能太长,否则会占据运载船的太多空间。然而,缆线的长度有限,这直接限制了下潜深度。所以,使用这种缆线时,往往需要先用载人潜水器把水下机器人送到一定深度。
在潜水器下潜、上浮过程中,或是水下作业前进、后退或转动时,都必须特别注意缆线的位置,避免缆线缠绕潜水器或挂在海底岩石上等,这增加了潜水器灵活操作的难度。另外,每次下潜归来后,将缆线收回重新卷好也要花一定时间,没有下潜任务时也要避免缆线受损。
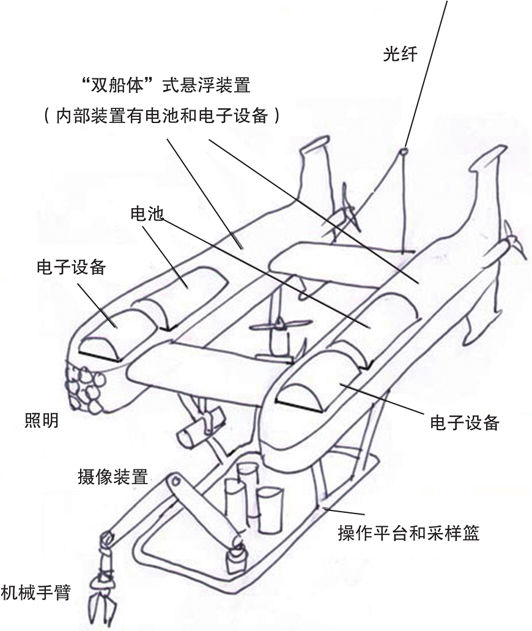
伍兹霍尔海洋研究所研制的“海神”号,兼有遥控和自主两种工作模式,有效地解决了传统缆线的这些问题。它采用了一种超细超轻的光纤缆线,长度可达40千米,不仅保持良好的通讯效果(下潜期间可以实时传送数据和图像),而且解决了下潜深度的局限性问题。而且,这种超细光纤缆线是一次性使用,下潜结束时,可以直接将该缆线抛掉,所以水下作业时不需要特别注意缆线是否挂在海底岩石上。万一工作过程中光纤缆线断裂,“海神”号会自动启动应急系统,上浮到水面。运送“海神”号的船舰会根据下潜计划配备几套超细光纤线,假如“海神”号计划在某个地方工作6天,那么运输船舰上就配有6根超细光纤线:“海神”号早上下潜进行海底工作,晚上返回运输船进行蓄电池充电、标本回收等,第二天早上只要装上另一根超细光纤线就可以再次下海工作了。
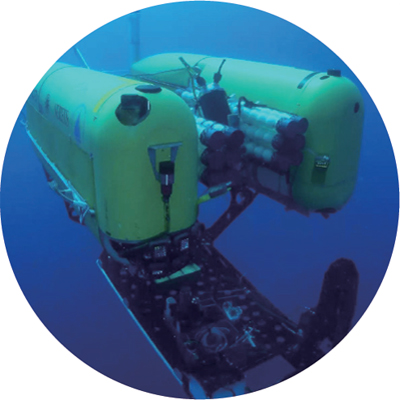
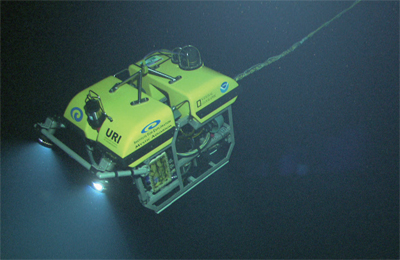
▲ “海神”号无人潜水器
“海神”号仅长3米、重2.5吨,不但小巧,而且操作灵活,普通船只,甚至飞机就可以运载。另外,小巧的体型也让它的入水操作更简单,运送母船底部上配有一个开关门,使“海神”号可以从这里入海。这种入海方式更为简单,而且不受海面天气的影响。由于“海神”号运输更容易,操作更便捷灵活,使用成本较低,因此,它更符合深海海洋研究的需求。
2009年5月底,“海神”号的下潜深度达10.9千米,成为有史以来下潜亚军,仅次于水下气球艇“特里亚斯特”号。深海海洋学研究界对“海神”号抱有极大的希望。不幸的是,2014年,“海神”号在克马德克海沟下潜时突然通讯中断,潜水器再也没有浮出水面。根据后来发现的潜水器残骸判断,事故原因很可能是压舱物内爆。
载人潜水器VS水下机器人:竞争还是互补?
如果“海神”号没有发生那次意外,是不是意味着水下机器人就会慢慢代替载人潜水器?其实不然。深海潜水器的主要工作之一是研究深海生物,它们需要强大的照明系统支持观察和拍照,但是目前照明系统的能力还很有限。在弱光条件下,人眼的适应能力比机器强,再加上深海黑暗环境下的生物会出于对强光的恐惧而躲藏起来,因此能够使用弱光的载人潜水器就可以让科研人员在不惊吓深海生物的前提下进行观察。同时,水下机器人即使配备了非常先进的遥控功能,在海底作业过程中难免会出现原先没有预计的情况,在应对意外方面,遥控的能力还远远比不上直接操作。
目前,水下机器人的下潜深度(10000米)超过载人潜水器(6000~7000米),不过海洋98%的区域的深度都在6000米以内,所以载人潜水器可以满足绝大部分深海研究的需求。这也是在水下机器人快速发展的背景下,仍有很多国家在努力研发和改善载人潜水器的原因。除了传统的深海潜水器研制强国美国、法国、日本、俄罗斯等,中国已经成为该领域的后起之秀,2010年投入使用的“蛟龙”号载人潜水器在2012年创下了7062米的下潜纪录。
从“阿尔文”号到“蛟龙”号,现代潜水器的主要结构并没有明显变化,科学家改进的主要是材料,特别是主舱的材料。此外,蓄电池技术的进步也让潜水器的有效工作时间不断延长。
▲ 载人潜水器“库拉”潜艇(Curasub)可以最多搭载5人下潜
注释
[1] 《丁丁历险记》中的“向日葵教授”据说就是以奥古斯特·皮卡尔为原型的。
[2] 选择汽油是因为汽油比水轻,可提供浮力,同时还具有不可压缩性。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。











