



12.2.3 变焦距照相物镜
摄影镜头由各种定焦摄影镜头扩展到变焦距镜头,是近四十多年来光学上的一个重要成就,也是在模拟人眼调焦功能方面的一大进步。由于电子计算机在光学设计上的应用,以及光学多层介质膜用于增透光技术的成功与精密机械加工的进步等,才使变焦镜头的设计与制造得以实现。目前已有多种性能良好的变焦镜头,广泛用于电视与电影摄像、火箭与导弹跟踪记录、望远摄影(如人造卫星)和显微摄影等技术领域。变焦镜头为适应不同的应用需求可分为不同的类型。
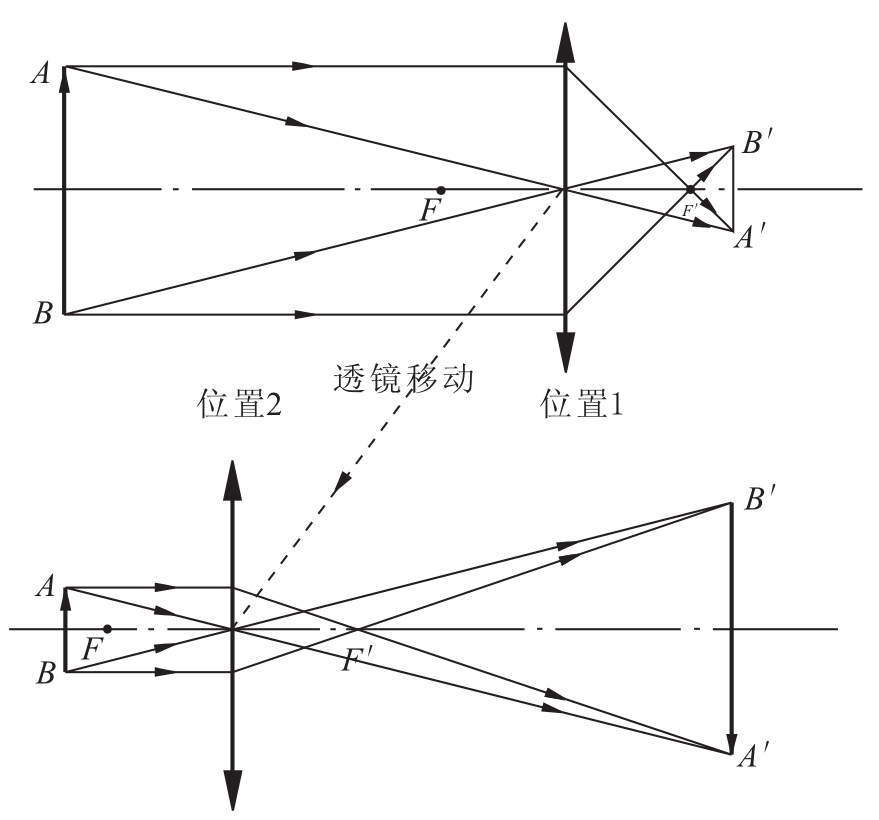
图12.15 物像交换原则
变焦距物镜的基本指导思想是,利用系统中两个或两个以上透镜组的移动,在改变系统组合焦距的同时保持最终像面位置不变,使系统在变焦过程中获得连续清晰的像。变焦距范围两个极限焦距即最大焦距与最小焦距的比值M=f'max/f'min称为变倍比,简称“倍率”。对变焦距物镜的主要性能要求是:高变倍比、大相对孔径、大视场、电动变焦、自动调焦、体积重量小、像质应达到或接近定焦距物镜的质量。同时满足上述相互制约的要求难度很大。另外,上述性能要求中的相对孔径,对一般变倍系统在变倍过程中系统的相对孔径可保持不变,但对高变倍系统也可以采取长焦距时小相对孔径的方案。
变焦距物镜的具体变焦与补偿原理,是基于高斯成像光学的一对共轭物像面的“物像交换原则”,即透镜有两个位置可使该两共轭物像面互为物像关系,如图12.15所示。当透镜处于位置1成缩小像时(放大倍率为1/β),则在位置2将成放大像(放大倍率为β)。当透镜从位置1移至位置2时,放大倍率就在1/β和β之间连续变化,与此同时,中间倍率的像位置均要发生变化。这组移动透镜即构成了变倍物镜的变倍组元;为了消除由于变倍组元移动引起的像面位置变化,必须采取补偿措施补偿像面的位移。总之,变焦距物镜的基本原理就是,利用改变透镜组之间的间隔来改变整个物镜的焦距;与此同时,要采用补偿组元补偿伴随焦距变化引起的像面位移。
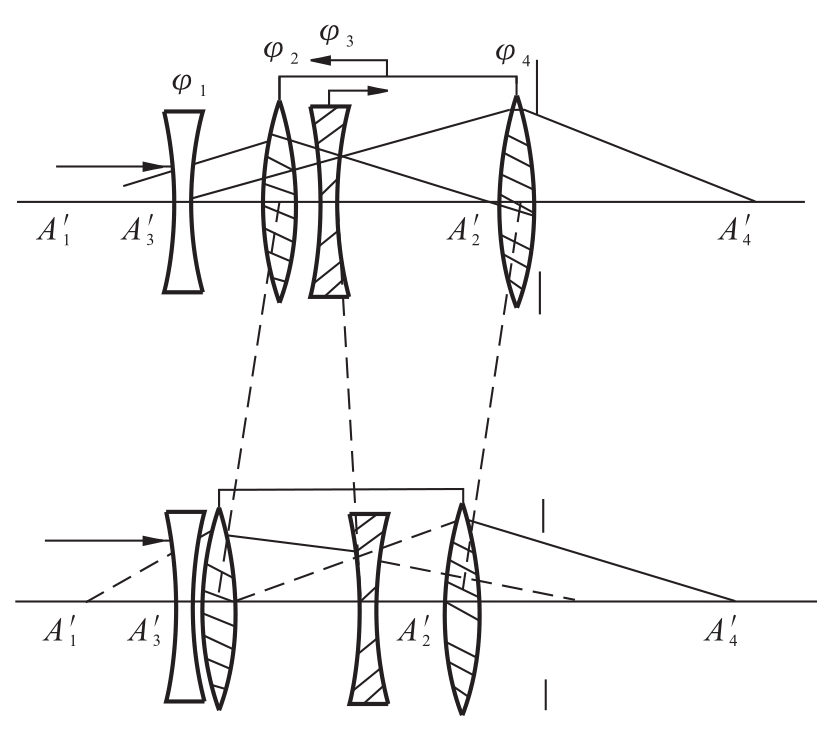
图12.16 四组元光学补偿变焦距物镜
按照对像面补偿的方式可将变焦距物镜分光学补偿式变焦距物镜与机械补偿式变焦距物镜。其中,光学补偿式变焦距物镜是利用物镜中的一个或几个组元作线性联动而实现变焦与补偿的目的。如图12.16所示,即为一负组在前的四组元光学补偿变焦距物镜,由于用于变焦及补偿的运动组元即变焦透镜组是由正、负、正三个透镜组成,因此又称为“正、负、正”型变焦距物镜。光学补偿变焦距物镜可分为二、三、四组元系统,组元数目的计算是从最后一个运动组元向前数,有几个透镜组就是几组元系统(包括所有运动组元和固定组元),而且也就有相应数量像面重合的焦距。图12.16的上部为短焦距位置,下部为长焦距位置,这三个透镜组可各自分别按一定规律移动,以达到最大限度的变焦效果。为了简化透镜组运动规律,可把φ2和φ4固定在一起进行移动,φ3则独立移动。如果三个变焦透镜组的光焦度φ2、φ3、φ4分配适当,当φ2和φ4在一起移动时,φ3保持不动,即可实现在四个焦距上达到像面位置不变,但其它焦距的像面位置仍有偏移。由于这种变焦方式只能保证几个有限焦距的像面稳定重合,而其它焦距的像面则是偏离的,不能保证成像质量,因而目前已很少应用。
机械补偿式变焦距物镜由前固定组、变倍组、补偿组和后固定组组成。其中,变倍组与补偿组为运动组元。利用变倍组的线性运动实现焦距的连续改变;与此同时,利用补偿组的非线性运动来补偿变倍组元变焦时伴随产生的像面位移,从而实现变倍过程中像面的基本稳定。机械补偿变焦方式的最大优点是,能实现变倍过程中像面的基本稳定,因而目前得到广泛应用。其中,像面位置补偿效果与成像质量主要靠光学设计以及非线性凸轮的精确设计与制造保证,当然,做到这一点难度很大。机械补偿式变焦距物镜可以根据补偿组元是负组元或正组元而区分为负组补偿和正组补偿。
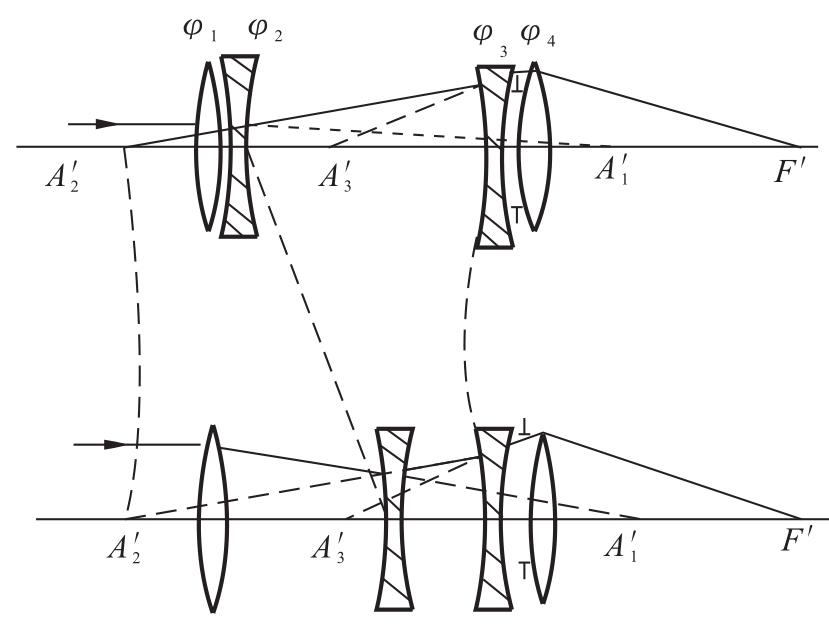
图12.17 负组补偿型变焦距物镜
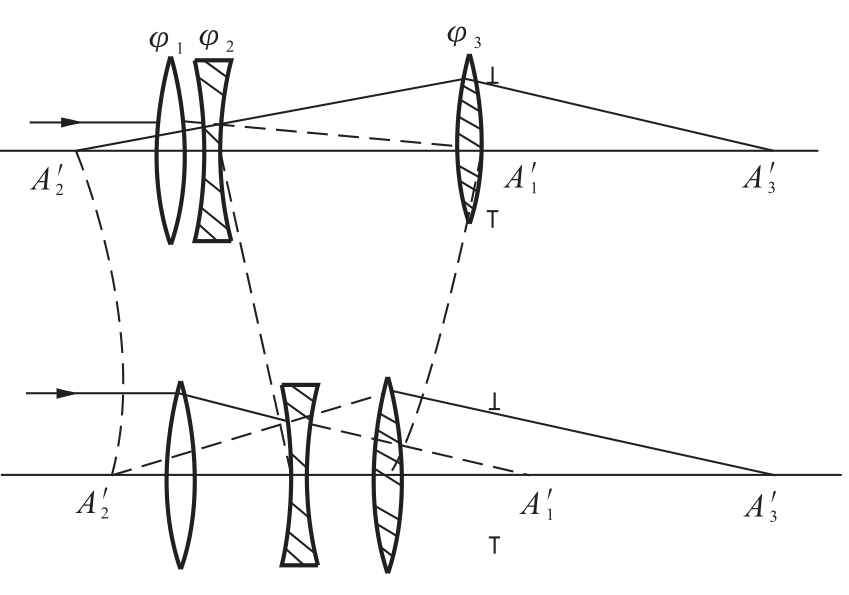
图12.18 正组补偿型变焦距物镜
负组补偿类型变焦距物镜的变焦透镜组是由两个负透镜组构成的,又称为负-负型变焦距物镜,如图12.17中打有斜线的透镜组φ2、φ3所示。景物通过前面的固定透镜组(简称前固定组)φ1成像于A1',成为变焦透镜组φ2的虚物,经φ2以后成像于A2',再经补偿镜组φ3成像于A'3,最后由后固定组φ4成像于最后像面F'。
由于变焦透镜组φ2、φ3的移动,使β2、β3发生改变,同时保持像点A'3位置不变。即使系统的组合焦距f'改变,而最后像点F'位置不变。图12.17上部表示最短焦距时的变焦透镜组位置,下部表示最长焦距位置。变焦距物镜的焦距由下式决定:
f'=f'1·β2·β3·β4 (12.10)
式中:f'1——φ1的焦距;
β2、β3、β4——φ2、φ3、φ4的放大倍率。
正组补偿类型的变焦透镜组由一个负透镜组和一个正透镜组构成,又称为负-正型变焦距物镜,如图12.18所示。图中上部为最短焦距位置,下半部为最长焦距位置。该类系统中,β2、β3均小于零。景物经前固定组和变焦透镜组以后为实像,因此系统可以不加入后固定组。但为了校正像差,或者为了增加或减小系统的相对长度,一般仍加入适当的后固定组。这类系统中的两个变焦透镜组都有较大的移动量,在变焦过程中φ2和φ3都起变倍作用,但习惯上仍称φ2为变倍组,φ3为补偿组。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。











