



4.2 共轴球面系统的物像关系矩阵
在共轴球面系统中,当引入相应的物平面与像平面之后即得到成像的概念。从物平面上一点到其像平面上的共轭像点,可以认为中间经过一个变换,由此即引出物像关系矩阵的概念。
若轴外物点B经系统成像为B'点(见图4.1),这一成像过程,除应考虑系统(透镜)本身的变换作用外(即系统的作用矩阵),尚应考虑光线在物平面到系统(透镜)第一表面均匀介质中的传递变换(即从B点到P1点)以及光线在系统(透镜)的最后(第二)表面到像平面间均匀介质中的传递变换(即从PK点或P2点到B'点)。这两部分变换作用,从本质上说都是传递矩阵的作用(与光线在透镜介质中的传递矩阵类同)。应该注意的是,这两个传递矩阵中的间隔d值应分别以物距(-l1)和像距(lK')的绝对值代入。下面导出由K个面组成的共轴球面系统物像关系矩阵的一般形式。若从物面到透镜第一面的传递矩阵以T1A表示,从系统最后表面到像面的传递矩阵以TA'K表示,即分别有
则定义从物面到像面的系统物像关系矩阵为
![]()
即系统的物像关系矩阵是由物空间传递矩阵(T1A)、系统作用矩阵(MK1)和像空间传递矩阵(TA'K)的乘积构成。
若过物点B的光线为 ,则到达像点B'的光线为
,则到达像点B'的光线为

上式的物理意义是:传递矩阵T1A将物点B上的光线 传递到P1点;系统的作用矩阵MK1使光线经系统到达PK点;传递矩阵TA'K将PK点的出射光线传递到像点B',即得到像点上的光线
传递到P1点;系统的作用矩阵MK1使光线经系统到达PK点;传递矩阵TA'K将PK点的出射光线传递到像点B',即得到像点上的光线 。总之,物像关系矩阵MA'K反映了一对共轭面上的物像关系变换作用。
。总之,物像关系矩阵MA'K反映了一对共轭面上的物像关系变换作用。
将式(4.31)按矩阵乘法展开,得到

将上式代入式(4.32),得到

式(4.34)对应的线性方程组为:

由式(4.36)可以看出,在系统作用矩阵(高斯常数a、b、c、d)确定的条件下,像高yK'不仅与物高y1有关,而且与物点B上发出的光线的倾斜角u1有关。对给定的物高y1,像高yK'随u1的不同而不同,即 非常量,产生像差。在近轴理想成像的条件下,像高yK'应与u1无关,即β应为常量,这就要求式(4.36)中首项的系数为零,即应有
非常量,产生像差。在近轴理想成像的条件下,像高yK'应与u1无关,即β应为常量,这就要求式(4.36)中首项的系数为零,即应有
![]()
由上式即可导出近轴像距:
![]()
显然,lK'与l1唯一对应,而与u1无关。相应地,理想像高与横向放大率分别为
![]()
![]()
这样,当给定物距l1和系统结构,求出系统作用矩阵各高斯常数a、b、c、d后,即可利用上述公式依次求出lK'、yK'和β。
将式(4.37)代入式(4.33)中,且知detMA'A=1,因此应有
![]()
将式(4.37)、式(4.40)、式(4.41)代入式(4.33),可以得到近轴物像关系矩阵的十分简洁的形式:
![]()
上述物像关系矩阵的形式具有普遍意义,对于任何复杂系统均适用。
相应地,物像关系的矩阵方程应为:
![]()
显然,上述由K面组成的共轴球面系统中的有关公式,同样适用于由两个折射面所组成的透镜(或单折射面),只需令各有关公式中的下标K=2(或K=1)即可。
利用上述由近轴物像关系矩阵所导出的公式(4.38)~式(4.40),可以计算确定共轴球面系统的基点位置和焦距,并从中看出各高斯常数的物理意义。
(1)主面位置
在公式(4.40)中,将β=+1代入,并令lK'=lH',则得到像方主面位置:
![]()
若将β=+1代入式(4.41),并令l1=lH,则得到物方主面位置:
![]()
(2)焦面位置
当l1=-∝时,β=0,令lK'=lF',代入式(4.40),则得到像方焦面位置:
![]()
当lK'=∝时,β=∝,令l1=lF,代入式(4.41),则得到物方焦面位置:
![]()
(3)焦距值
![]()
![]()
显然,
(4)节点位置
由式(2.46)和式(2.47)知  ,由于节点处γ=1,因而
,由于节点处γ=1,因而 。将β值代入式(4.40),并令lK'=lJ',则得到像方节点位置:
。将β值代入式(4.40),并令lK'=lJ',则得到像方节点位置:
![]()
将 代入式(4.41),并令l1=lJ,则得到物方节点位置:
代入式(4.41),并令l1=lJ,则得到物方节点位置:
![]()
由式(4.50)和式(4.51)亦可以看出,在空气中系统的节点与主点重合。
各高斯常数的物理意义分析如下:
由式(4.48)得到
![]()
表明系统作用矩阵的高斯常数a就是系统的总光焦度φ。
将式(4.47)÷式(4.49),得到
![]()
将式(4.46)÷式(4.48),得到
![]()
式(4.53)和式(4.54)表明,高斯常数b和c分别是物方和像方的顶焦距与焦距之比。
另外,对透镜来说, 可视为透镜的相当空气层厚度。
可视为透镜的相当空气层厚度。
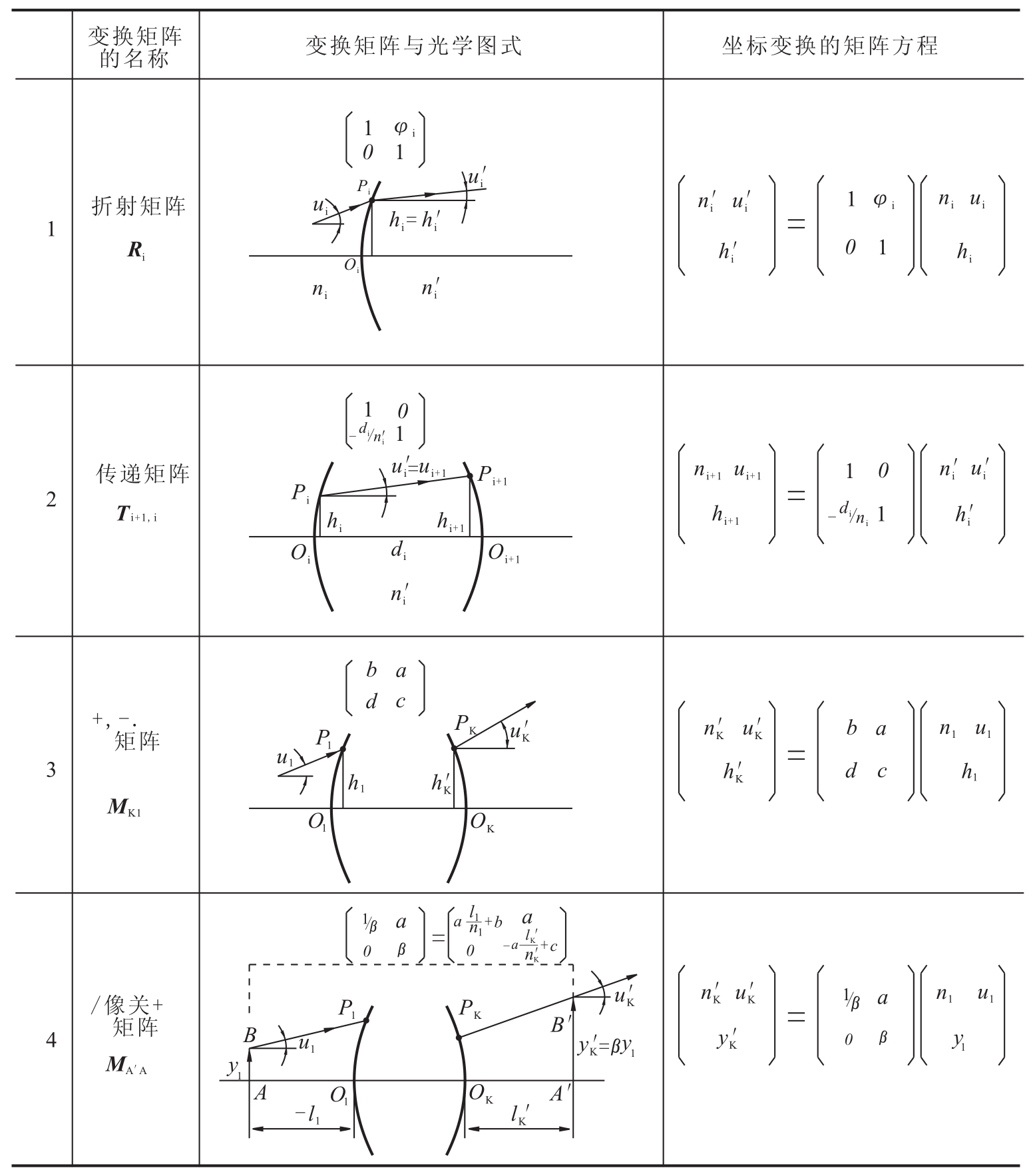
最后,将共轴球面系统近轴的各变换矩阵概念,列表如表4.1所示,并举例计算。
[例4.2]计算[例4.1]负弯月透镜的基点位置和焦距值。
解:已知
由式(4.44)~式(4.51),应有
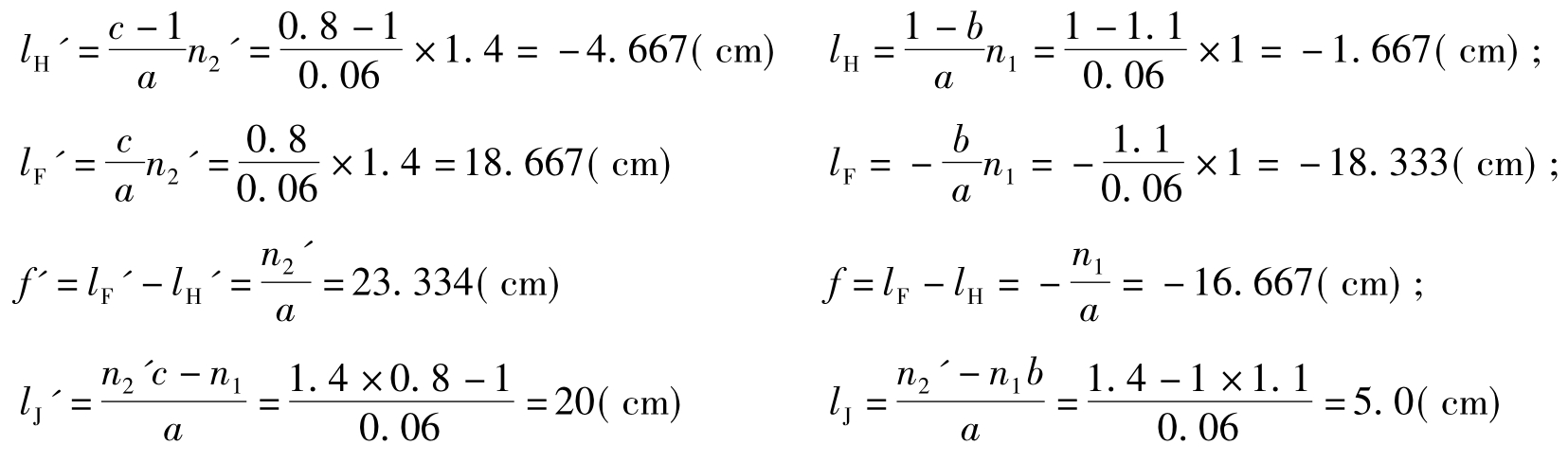
上述计算表明,由于负弯月透镜两边介质不同,因而有 ;且节点与主点不重合。其各基点位置表示于图4.3。
;且节点与主点不重合。其各基点位置表示于图4.3。
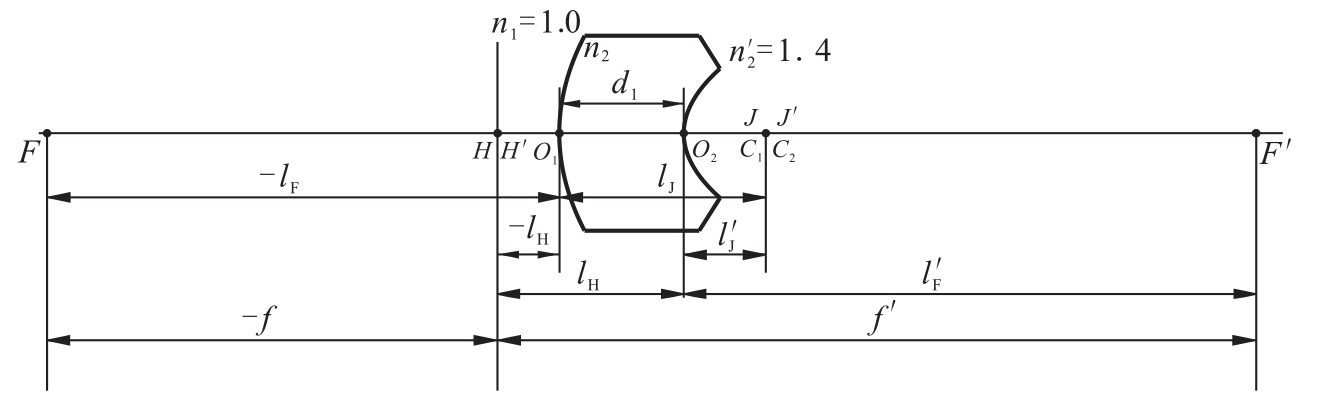
图4.3 负弯月透镜的各基点位置
表4.1 共轴球面系统近轴的各变换矩阵
[例4.3] 有一双胶物镜,其结构数据为:n1=1.0,n1'=n2=1.5,n2'=n3=1.6,n3'= 1.0;r1=1.0,r2=-2.0,r3=-5.0,d1=0.5,d2=0.5。
求该双胶物镜的作用矩阵、基点位置和焦距;又知在物镜左侧4.0处有一物体,物高为0.5,求其近轴像距、横向放大率及像高。
解:(1)首先写出构成系统作用矩阵的各折射矩阵和传递矩阵,然后求系统作用矩阵、基点位置和焦距:

系统的作用矩阵:
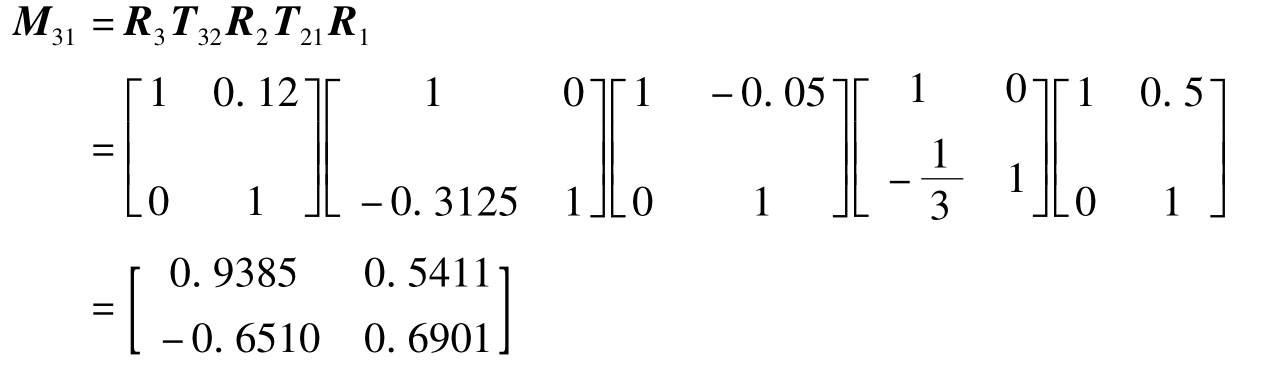
高斯常数:a=0.5411,b=0.9385,c=0.6901,d=-0.6510。
校核:detM31=bc-da=0.9385×0.6901-0.5411×(-0.6510)=1.0,表明计算正确。其
各基点位置和焦距为(该双胶物镜位于空气中):

(2)求近轴像距l3'、横向放大率β、像高y'并写出其物像关系矩阵。
已知l1=-4.0,y1=0.5;又由(4.38)式应有
![]()
由式(4.39)和式(4.40)知,应有
y3'=(-al3'+c)y1=(-0.5411×2.7828+0.6901)×0.5=-0.4078
![]()
由式(4.42)知,其物像关系矩阵应为
![]()
以上,通过较简单系统的举例,介绍了根据给定的共轴球面系统具体结构,求系统作用矩阵、物像关系矩阵、以及由物求像的具体方法。应该指出,对较复杂系统利用矩阵方法计算,并非通过手工计算,而是通过编制程序在计算机上进行计算,因而具有很大的优越性。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。











