



4.3.5 达朗伯原理
达朗伯原理提出了另一种解决动力学问题的方法——动静法,即把动力学问题从形式上转化为静力学问题,然后用静力平衡条件求解。
1.惯性力的概念
当质点受到其他物体的作用而改变其原来的运动状态时,由于质点的惯性产生对施力物体的反作用力,称为质点的惯性力。惯性力的大小等于质点的质量与其加速度的乘积,方向与加速度的方向相反,并作用在施力物体上。惯性力的表达式为
FI=-ma
2.质点的达朗伯原理
设质点M,质量为m,受到主动力合力F、约束力合力N作用。合力R=F+N。在合力R作用下具有加速度a,则
R=F+N=ma
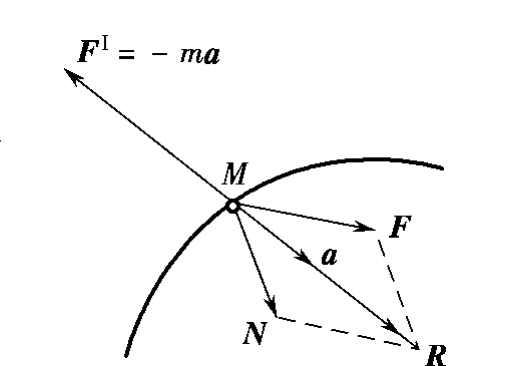
图4.3-10
令惯性力FI=-ma,并假想把惯性力作用于质点上,则R+FI=0,即F+N+FI=0。此式即为质点的达朗伯原理。表示如果在运动的质点上,假想加上惯性力,则作用于质点的主动力F、约束力N和惯性力FI成平衡。应该注意,这里的“平衡”没有实际的物理意义,它不过是质点运动微分方程的另一种形式,即把ma项移到左边。
3.质点系达朗伯原理
对质点系内各质点都可列出
Fi+Ni+FIi=0(i=1,2,…,n)
此式即为质点系达朗伯原理。一般地说,它是一个空间任意力系。
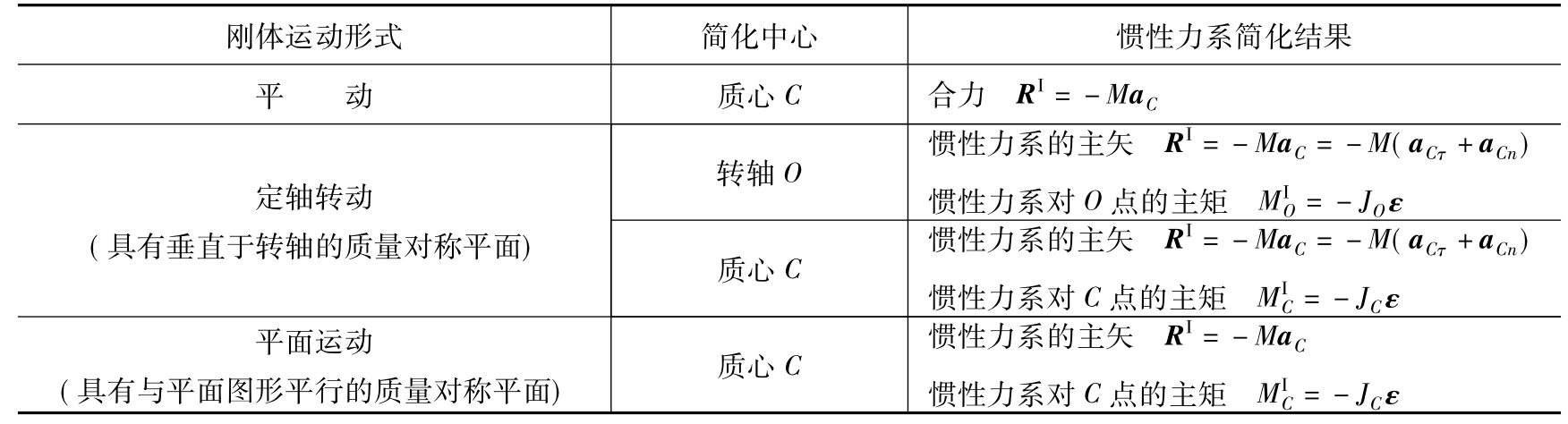
4.刚体惯性力系的简化
根据力系简化理论,按刚体的各种运动形式,可分别将惯性力系简化,其结果如表4.3-8所示。
表4.3-8
【例4.3-9】长方形匀质薄板重W,以两根等长的软绳支持,如图4.3-11所示。设薄板在图示位置无初速地开始运动,图中α=30°。求此时绳子中的拉力。
解:(1)对象
以平板为研究对象。
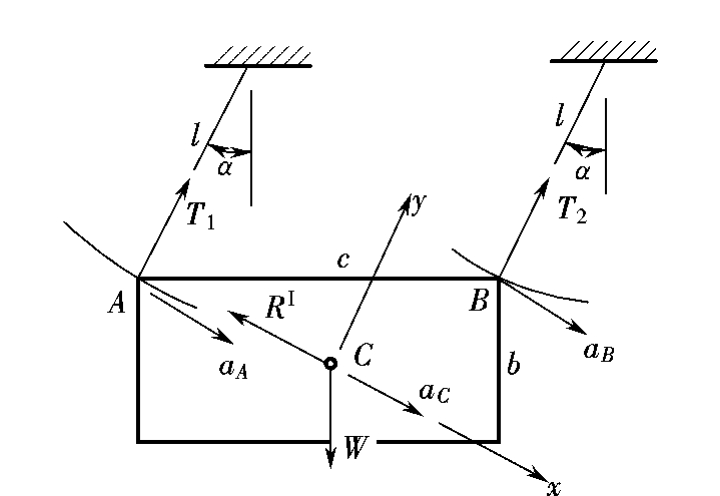
图4.3-11
(2)受力分析
运动开始时板受重力W、软绳约束反力T1、T2。
(3)运动分析并虚加惯性力
由约束条件知平板作平动,在运动开始时板上各点法向加速度为零,切向加速度垂直于软绳,大小aτ=lε。ε为软绳的角加速度,于是平板惯性力的合力RI= 加于质心C上。如图4.3-11所示。
加于质心C上。如图4.3-11所示。
(4)选坐标系,列方程求解
作用于板上的主动力W、约束反力T1、T2及虚加的惯性力RI构成平面平衡力系。根据动静法列方程
ΣmA(Fi)=0
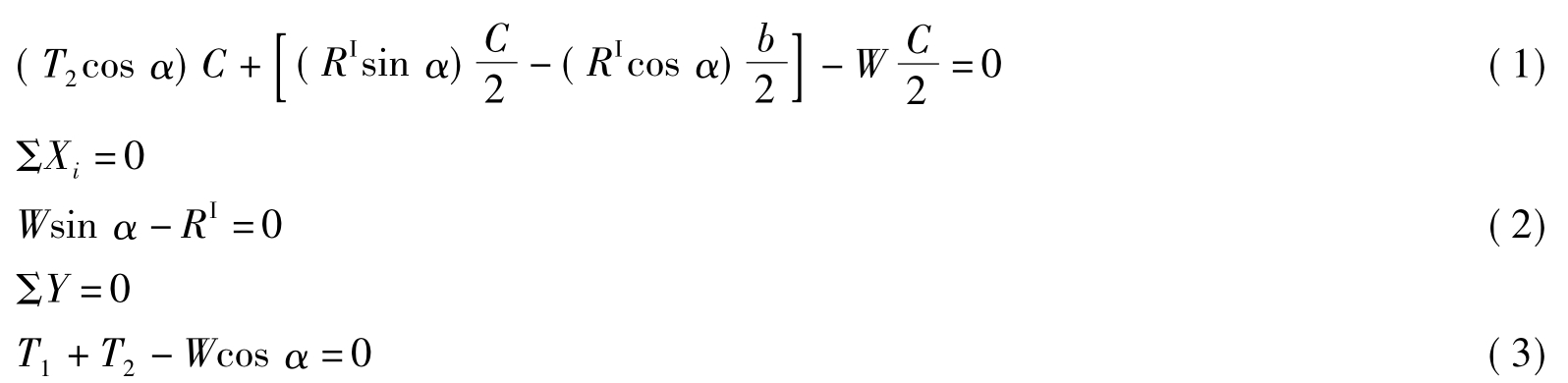
从此可求得T1、T2以及RI,从RI可得到薄板运动的加速度。
今设C=2b,W=1kN,从式(2),得到
RI=Wsinα=0.50kN
并得到板的加速度
a=gsinα=4.90m/s2
代入式(1),解得T2=0.56kN
从式(3)可得T1=0.31kN
【例4.3-10】质量为m、长为l的直杆AB的一端A焊接于半径为r的圆盘边缘上,如图4.3-12(a)所示。令圆盘以角加速度ε绕其中心O转动。求其开始转动时AB杆上焊接处由于转动而引起的约束反力。并讨论当圆盘以匀角速ω转动时的情况。
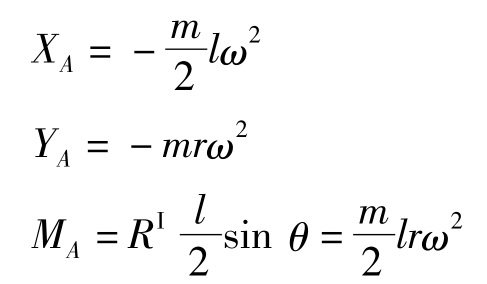
解:以直杆AB为研究对象,由于直杆AB随同圆盘一起绕固定点O以角加速度ε转动,杆上所有的惯性力可以简化为一个过O点的力RI,以及一个力偶MI
O,其大小分别为
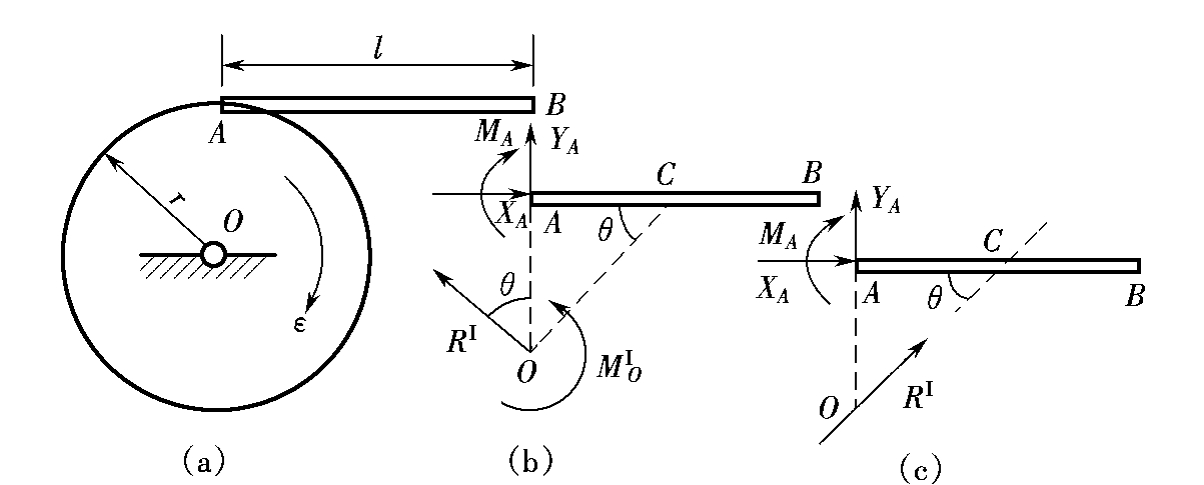
图4.3-12
![]()
RI的方向及 的转向如图4.3-12(b)所示。根据动静法列方程
的转向如图4.3-12(b)所示。根据动静法列方程
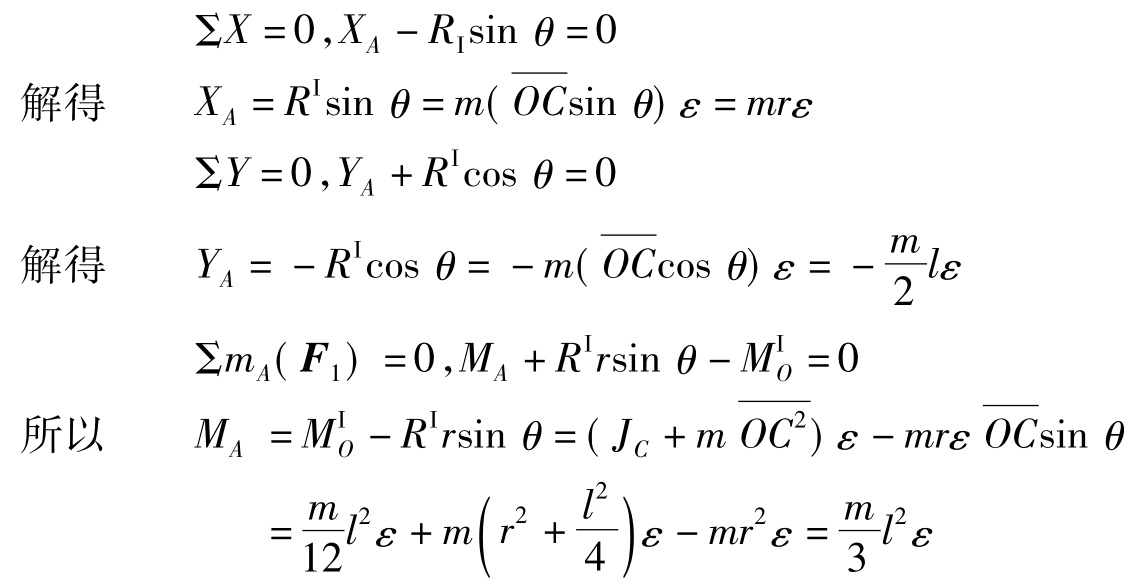
当直杆随同圆盘以ω匀速转动时,直杆上的惯性力可简化为如图4.3-12(c)所示。此时, OCω2,RI通过O点,方向如图4.3-12(b)所示。从此,可求得:
OCω2,RI通过O点,方向如图4.3-12(b)所示。从此,可求得:
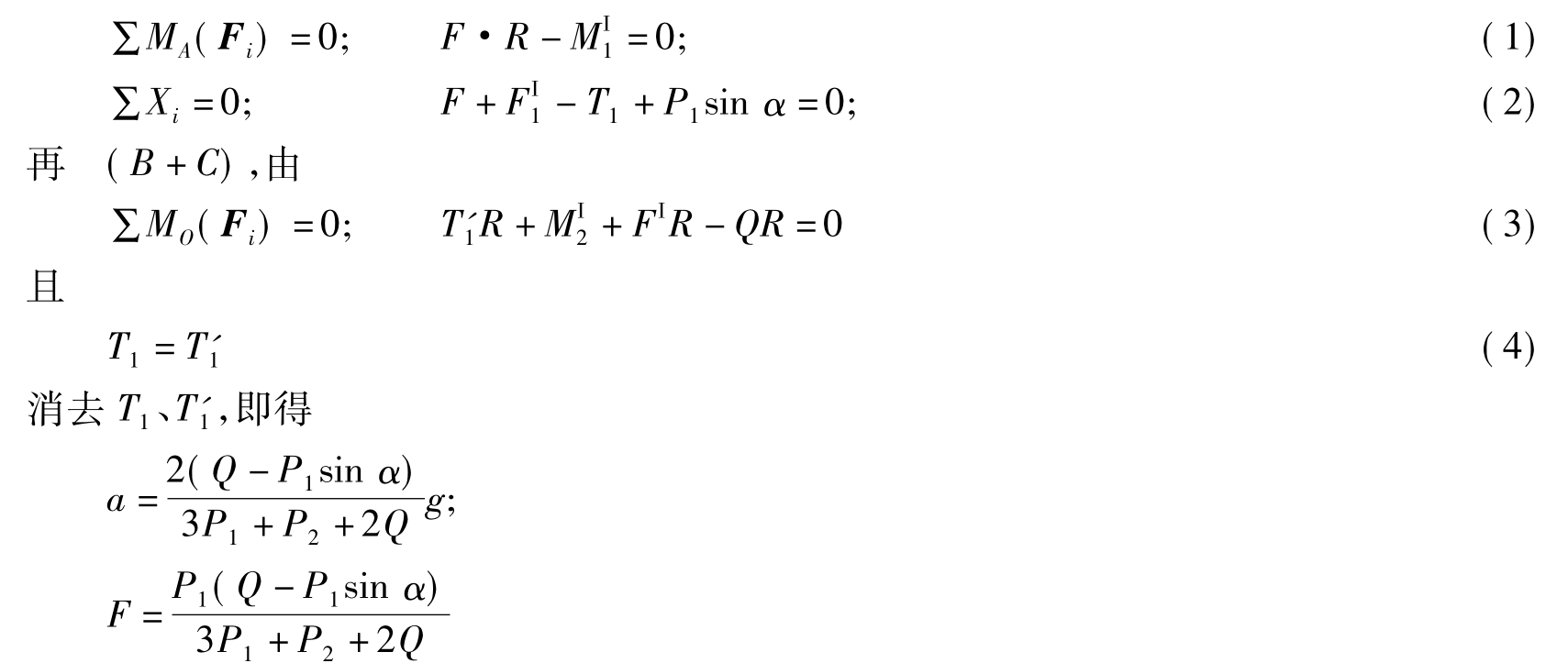
【例4.3-11】轮A、B均质,重为P1、P2,半径均为R,物块C重Q,用一不计质量不伸缩的绳子连接,如图4.3-13所示。轮A在α角斜面上作纯滚动,轮B绕O轴转动。试求物块C下落的加速度a和斜面对轮A的摩擦力F。
解:分析系统受力情况,主动力为P1、P2、Q,约束力为法向反力N、摩擦力F、轴承处约束力XO、YO以及内约束力T1(A与B间的绳子张力)、T2(B与C间的绳子张力)。用动静法求解较方便,则分别在A、B、C上加惯性力: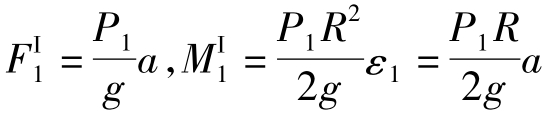 (因轮A作平面运动,且为纯滚动),
(因轮A作平面运动,且为纯滚动), (因轮B作定轴转动,轮心与O重合),FI=
(因轮B作定轴转动,轮心与O重合),FI= (物块C作直线平动)。根据平面力系物体系统平衡,共可列出独立平衡方程式3(A)+3(B)+1(C)=7个,未知量个数为a、N、F、XO、YO、T1、T2共7个,可见是一静定的代表方程组,可解。取A轮,由
(物块C作直线平动)。根据平面力系物体系统平衡,共可列出独立平衡方程式3(A)+3(B)+1(C)=7个,未知量个数为a、N、F、XO、YO、T1、T2共7个,可见是一静定的代表方程组,可解。取A轮,由
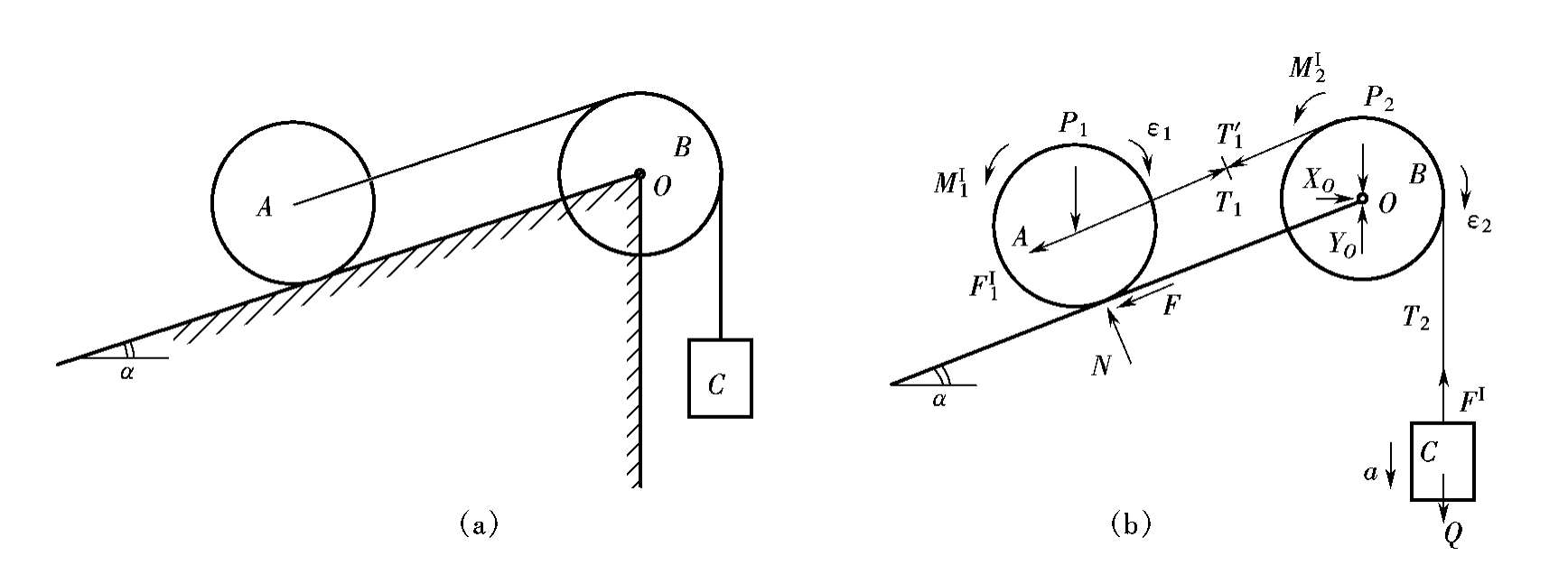
图4.3-13
讨论:本题若用动能定理求解加速度a也较方便,但动能定理不能求解摩擦力F。
从本题的求解过程可见,采用动静法解题,可以充分发挥静力学中灵活选取研究对象、巧妙选取矩心和投影轴的优点。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。










