



6.5 匹配实验及分析
为验证上述匹配方法开展了水下地貌图像匹配导航仿真实验。实验过程如图6-22所示。
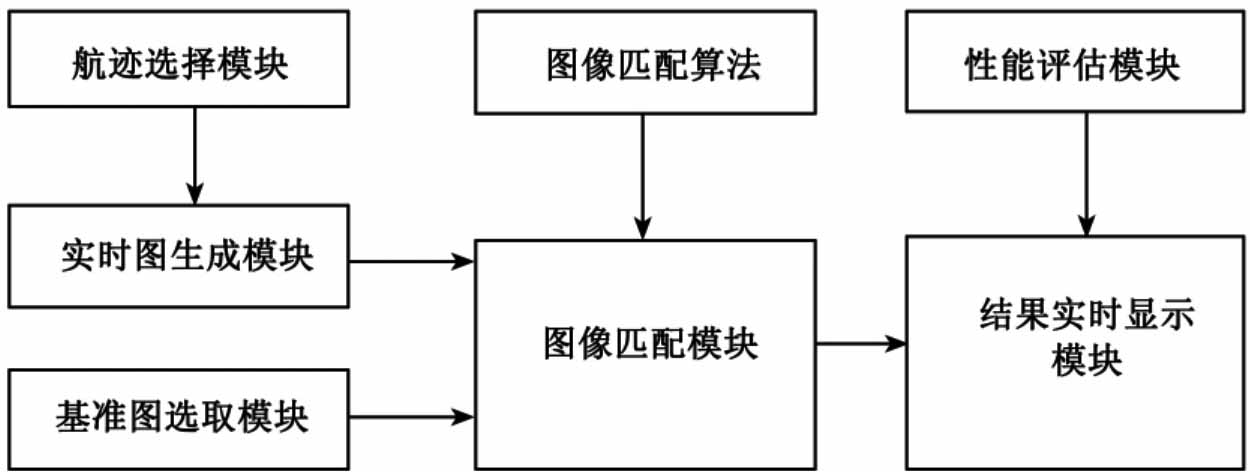
图6-22 地貌图像匹配导航仿真系统结构
在仿真实验中,根据选择的航迹,系统从图像数据库中获取背景地貌图像,而实时图像则由仿真得到,然后采用SURF算法进行地貌图像匹配,最终给出算法性能评估和匹配区域的可匹配性评价,以及潜航器当前的位置。
系统包括以下几个组成部分:
(1)航迹选择模块
在仿真试验开始前,人为地选择航行轨迹,在航行轨迹上按照相等或不等间隔,在背景场图像上截取一系列图像块作为基准图。
(2)实时图生成模块
对截取的基准图进行各种变换(如比例缩放、噪声、旋转、扭曲等),以此来模拟成像条件及硬件误差对配准的影响。
(3)图像匹配模块
采用SURF算法进行图像匹配,实时地显示匹配的结果,并显示位置信息,给出匹配相似性度量。
仿真实验系统工作流程如下:
(1)对背景场区域地貌图像进行预处理,包括平滑、消噪、直方图规则化等,以得到处理后的背景场图像。
(2)对航迹进行规划。对要航行的区域进行匹配区域评估,在航迹规划时避免选择特征地貌不明显的区域。
(3)设置仿真参数。仿真参数包括实时图大小、对实时图施加噪声种类和幅度以及实时图的尺度变换、旋转操作参数等。
(4)匹配导航定位。在设定参数后,图像匹配导航由程序自动完成,并实时显示匹配位置、匹配点对数、缩放旋转量以及相似性度。
图像匹配系统工作界面如图6-23所示。
将California州立大学海底绘图实验室实测的Mackerricher State Reserve的海底地貌图像(如图6-23所示)作为背景图像,对上述方法进行试验验证。该图像尺寸为4811×2107像素,像素代表的实际尺寸为2m×2m。根据侧扫声呐测量原理,在背景图像上不同的位置提取20个子块,这些子图有些位于特征图像区,有些位于非特征区。子块大小均为100×100像素。对这些图像进行旋转、缩放,仿射变换等变换。
匹配实验效果见图6-24和图6-25所示。

图6-23 背景场和实时图SURF检测
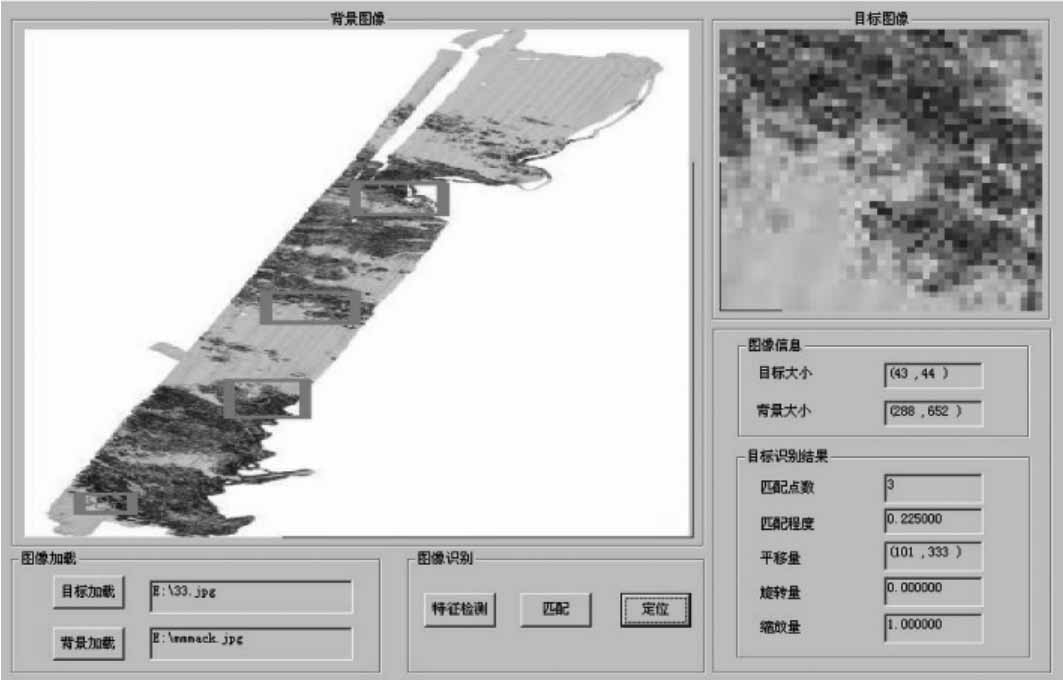
图6-24 目标匹配定位
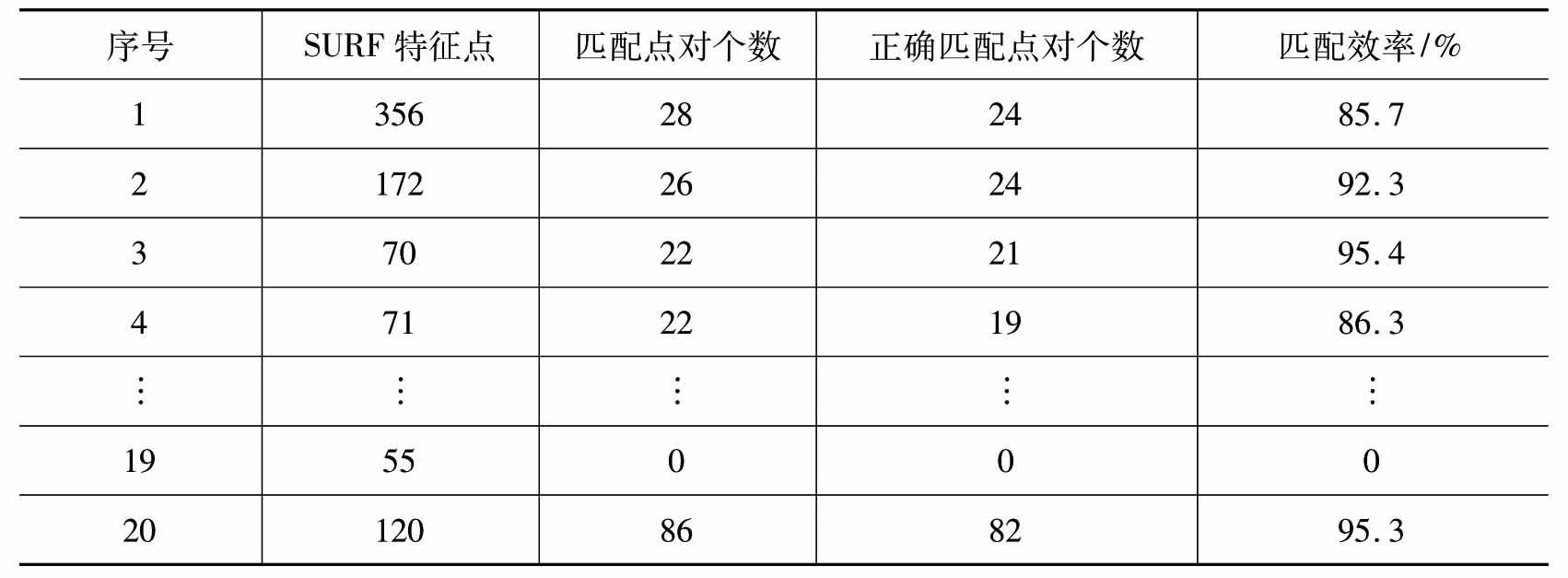
定义匹配效率如下:
![]()
为检验SURF算法的可靠性,对其匹配效率进行了统计,统计结果如表6-4所示。
匹配效果表明,针对尺度变换、角度旋转和噪声,SURF算法具有较好的抗干扰性,在一定的几何失真和角度旋转情况下,可以得到较好的匹配结果。

图6-25 图像不同位置的匹配效果
表6-4 图像匹配效率表
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。












