



子模块二 ARPA的避碰应用
学习目标:掌握ARPA判断相遇态势及碰撞危险的方法;
掌握ARPA用于避碰的方法。
重点难点:判断相遇态势、碰撞危险估计、求取避让措施。
一、ARPA用于判断相遇态势
(一)用相对矢量判断
如图8-2所示,目标A的相对矢量延长线若通过扫描中心O或与MINCPA圆相交,则表示它与本船有碰撞危险。若A的相对矢量延长线从“1”通过,则表示目标从本船船首通过。若A的相对矢量延长线从“2”通过,则表示它将从本船船尾通过。目标D从本船左舷过;目标C从本船船首正横过;目标B从本船右舷过。
(二)用真矢量判断
如图8-3所示,目标B为右舷追越船;目标D为左舷对遇船;C为船首向交叉会遇船;A的真矢量为零,因此是静止的固定目标。
图8-2 用相对矢量判断相遇态势

图8-3 用真矢量判断相遇态势
二、ARPA用于碰撞危险估计
图8-4 用相对矢量判断碰撞危险
(一)用相对矢量判断
根据本船的实际情况和当时的态势,设置MINCPA圆,延长相对矢量线,若相对矢量线与MINCPA圈相交,表示该目标与本船有碰撞危险。还可读出该目标的CPA和TCPA值,进一步予以核实,如图8-4所示。
(二)用真矢量判断
调整矢量时间长短,若本船真矢量与目标船真矢量的终端重叠或非常接近,则表示存在碰撞危险。当采用PCP(潜在碰撞点)或PPC(可能碰撞点)显示时,当PCP(或PPC)标志出现在本船船首线上或船首线附近时,则有碰撞危险。当采用PAD时,若本船航向线(受风流压影响时为航迹线)与PAD相交,则表示存在碰撞危险。
(三)用仅存危险矢量判断
当采用仅存危险矢量显示时,不论用相对矢量模式或真矢量模式,凡是在屏幕上显示矢量的目标,即是与本船有碰撞危险的目标。
(四)用PPC圈判断
当PCP(Potential Collision Point—潜在碰撞点)或PPC(可能碰撞点)标志出现在本船船首线上或船首线附近时,则有碰撞危险。
PPC的显示形式是目标真速度矢量前方的一个或两个小圆圈,此圆尺寸比“录取符号”小,但比“已录取目标标志”大。在显示PPC时,如果本来显示的是相对矢量,将自动变为真速度矢量。
图8-5中目标A与目标C有一个可能碰撞点,目标B有2个可能碰撞点,其中较远的一点正好位于本船真速度矢量线上,即本船的船首线正好穿过可能碰撞点,为了避免与目标B发生碰撞,本船必须采取避让措施,使船首线不穿过可能碰撞点。由于目标船并非一个点状体,具有一定尺寸,且考虑到各种可能存在的误差及应留出的安全避让余地,实际上应该避开的是该点周围的一个区域,即避开可能碰撞区(PAD)。
本船速度不变时,可能碰撞点PPC随时间的移动规律如下。
1. 两船处于将发生碰撞的态势
如图8-6所示为真运动情况,A为目标船,O为本船,本船快于目标船。如果不避让,两船在30min后相碰,可能碰撞点B。
图8-5 用PPC圈判断碰撞危险
如果在相对运动雷达显示器上,目标T将沿着一个不变的相对方位(舷角)向本船作相对运动。图8-7中虚线表示目标船T的真运动,开始时可能碰撞点PPC在P1,6min后可能碰撞点在P2。可见,可能碰撞点PPC沿着本船的船首线随着时间而逐渐向本船移动。

图8-6 真运动情况
图8-7 相对运动雷达显示
图8-8 目标船的速度比本船快
如果目标船的速度比本船快,存在两个可能碰撞点时,情况如图8-8所示。图中目标T也是作相对运动,虚线表示目标的真运动,可能碰撞点P也是沿着本船的船首线随着时间而逐渐向本船移动;另一个可能撞点A在本船右侧,同时向本船移动,而且是按照一个固定的方位移动。
2. 两船处于非碰撞态势
两船处于非碰撞形势,目标船T的相对运动线不穿过本船,如果目标船过本船船首(从本船前方穿过),可能碰撞点在相对运动雷达显示器上的移动轨迹如图8-9所示;如果目标船过本船船尾(从本船后面过去),可能碰撞点的移动轨迹如图8-10所示。从上述两图可以看到,当两船处于非碰撞形势时,可能碰撞点的移动轨迹线不穿过本船船首线,也就是说,可能碰撞点不会出现在本船船首方向。

图8-9 目标过船首

图8-10 目标过船尾
如果本船比目标船慢,可能同时存在两个碰撞点,也可能一个可能碰撞点也不存在。如图8-11所示,T1、T2、T3等是目标船的各时刻的相对运动位置,并画出了目标船的真速度矢量。P1、A1是对应于T1的两个可能碰撞点,P2、A2是对应于T2的两个可能碰撞点,O为本船,可能碰撞点位于本船船首线的两侧,并随着时间而向下移动,每一对碰撞点的距离越来越短,最后在本船的后面合成一点,再以后(T6以后)可能碰撞点消失,不可能再碰撞。A1、A2等离目标较近,称为第1碰撞点,P1、P2等离目标较远,称为第2碰撞点:第1碰撞点移动速度较慢,第2碰撞点移动速度较快。
综上所述,当采用PPC(可能碰撞点)圈时,当PCP(或PPC)标志出现在本船船首线上或船首线附近时,则有碰撞危险。

图8-11 碰撞点变化
(五)用预测危险区PAD判断
当采用PAD时,若本船航向线(受风流压影响时为航迹线)与PAD相交,则表示存在碰撞危险。
预测危险区PAD的显示形式是目标真速度矢量前方的一个或两个六角形的区域。如图8-12所示,跟踪窗内是被跟踪目标的回波,接着目标的是一段由点线组成的目标6min真速度矢量,再接着伸出去的一段实线是目标未来的真运动轨迹。以线的终端为中心画出了六角形危险区,PPC在线的终端附近。本船船首线是断续的,每段长度代表本船6min航程。电子方位线也是断续的,有线部分用点线表示,其长度也代表本船6min航程,其方向可在360°范围任意改变,如将电子方位线对准PPC,即可读出本船的碰撞航向,如本船改为此航向,将与目标相碰,目前实际航向是安全的,船首线未穿过PAD。
(六)PAD图形在本船速度不变时随时间的移动规律
1. 无危险目标的通过情况
如图8-13所示,双方保持原航向和速度不变,目标将安全通过本船船尾. 图中画出了目标的相对运动,也画出了PAD的移动情况,在PAD的移动过程中不会与本船船首线相交。

图8-12 预测危险区PAD

图8-13 无危险目标
2. 安全避让后的目标通过情况
如图8-14所示,原来本船船首线穿过PAD。为求安全通过,本船改变航向,使船首线正好通过PAD的长轴端点。此后双方保持航向航速不变,目标将从本船前方安全通过,随着目标的移动,PAD也在移动。虽然PAD的形状和大小在变化,但PAD 一直保持与船首线相切而不会被船首线穿越,即切点是贴着船首线而向下移动的,切点移动的速度与本船速度相等,但方向相反。
3. 有碰撞危险目标的逼近情况
如图8-15所示,本船首线穿过目标的PAD,如不及时避让,等目标向本船逼近后,所需避让的角度3、4(航向改变量)比1、2大。显然,在判定形势后应及早采取避让措施,以免造成紧迫局面。
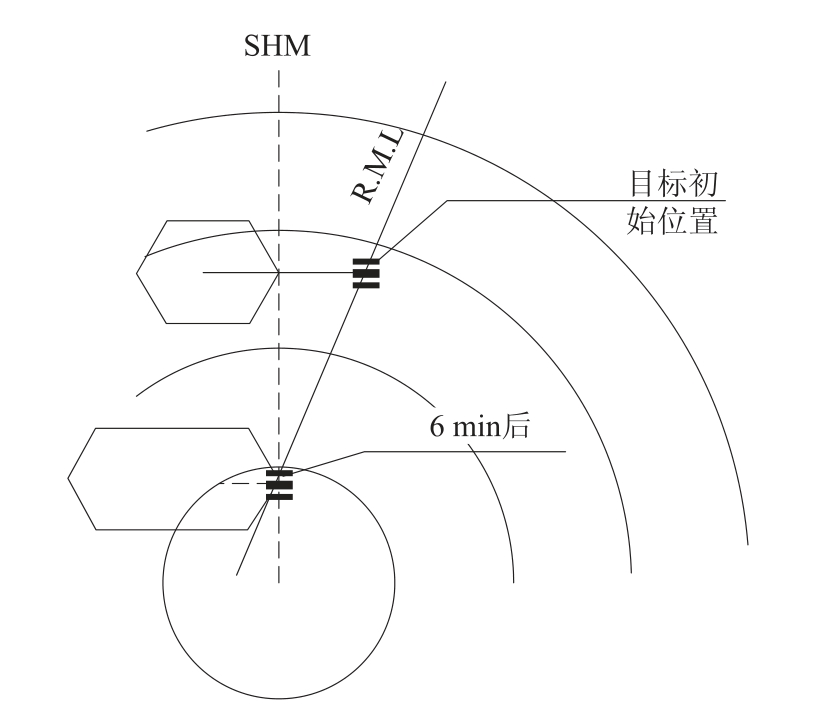
图8-14 安全避让后的目标通过情况
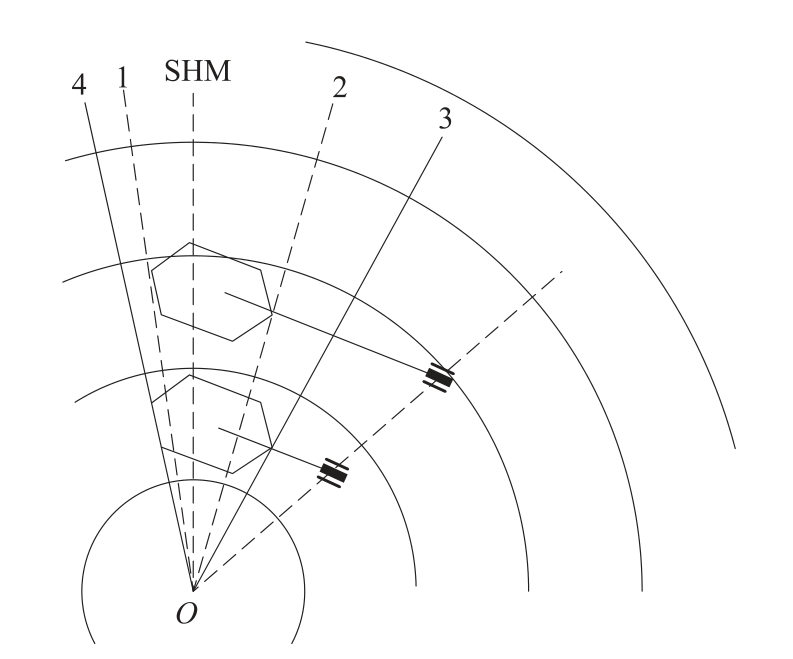
图8-15 有碰撞危险目标的逼近情况
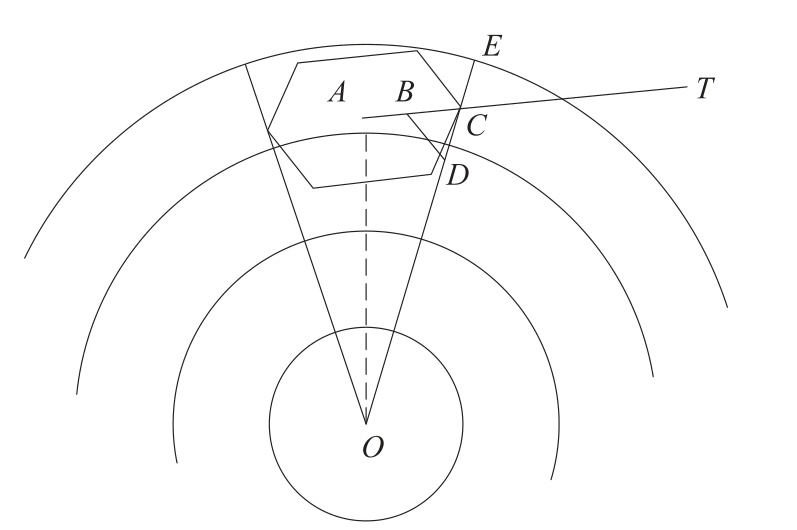
图8-16 航向复原时间的选取
4. 航向复原时间的选取
如图8-16所示,本船船首线正好穿过PAD,应该采取避让措施,根据PAD的指示,可以向右改向,也可以向左改向。如果向右改向,可以推出本船经过目标船的船尾(C点)。但这时目标在A点,两船的距离并不等于CPA安全界限。实际上是在此以前,本船在D点,目标船在B点,两船最接近,距离等于CPA安全界限,但D点在屏幕上是不显示的。反之同理。因此操作者在计划何时恢复原航向时必须考虑上述情况,小心行事。
5. PAD与两个目标船之间的关系
PAD的作用是显示本船和某个目标可能发生碰撞的危险区,而不描述两个目标船之间有否碰撞危险。如图8-17(a)所示,A、B两个目标的PAD有部分面积重叠,可以认为此两目标互相之间将以小于CPA安全界限的距离通过(当然不一定相碰)。又如图8-17(b)所示,虽然A、B两目标的PAD并不重叠,但它们将在C处相碰。

图8-17 PAD与两个目标船之间的关系
6. 各种不同本船速度输入对PAD的影响
目前ARPA输入本船速度的计程仪可以分成3类型:船对水速度,船首对地速度,船真实对地速度。
第1类提供本船对水速度,如水压式计程仪和电磁式计程仪。
第2类提供本船船首方向的对地速度,即计入船首尾方向的水流影响,如单轴多普勒计程仪在一定水深以内所提供的船速。
第3类提供本船的真实对地速度,即计入全部水流影响:如双轴多普勒计程仪在一定水深以内所提供的船速。
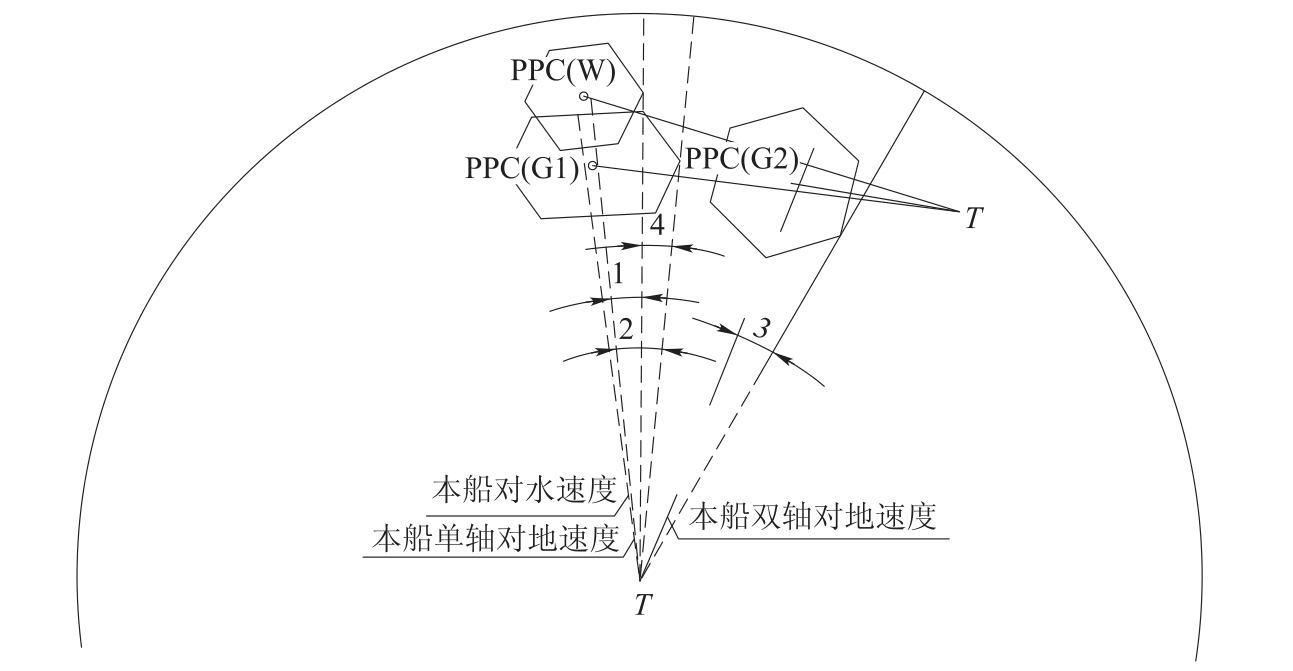
图8-18 各种不同本船速度输入对PAD的影响
由于输入的本船速度不同,所产生的PAD也不同,如图8-18中标有(W)的输入对水速度所产生的PAD。标有(G1)的为输入真实对地速度所产生的PAD,标有(G2)的为输入真实对地速度所产生的PAD,图中画出了本船的三种速度矢量,从PAD(W)和PAD(G1)都被船首线穿过,可看出将发生碰撞,因此必须避让。根据PAD(W)应向右让角∠1°,根据PAD(G1)则应向右让∠2°,其间差∠1°。由于在大海中航行,目标船和本船都受同样水流影响,因此在作船舶避让时,可以不必考虑水流的影响,根据PAD(W)让∠1°即可。如果根据PAD(G2)避让目标,就带来更多问题,因为通常ARPA只能显示本船船首线而不显示本船航迹线,由于船首线并不穿过PAD(G2),容易造成疏忽,以为没有危险。即使能显示本船航迹线,但根据航迹线及PAD(G2),只知道本船航迹应向右∠3°,而不能直接知道航向应让几度,直观性较差,给避让操作带来不便。因此当利用ARPA进行避让(包括避让在航船舶和固定目标(如灯船)等时),应该输入本船对水速度,而不要输入本船对地速度,这一点在IMO关于ARPA的性能标准中有相应规定:为ARPA输入本船速度的计程仪应能提供本船对水速度。只有在利用ARPA进行狭水道航行(例如利用导航功能)时才要输入本船对地速度。
练一练
在ARPA模拟器上通过PAD判断哪些目标船与本船有碰撞危险。
三、ARPA用于求取避让措施
运用ARPA的试操船功能,可求取本船对危险相遇船的避让措施。试操船成功的标志是碰撞危险的报警解除。
(一)当采用相对矢量显示时
本船模拟改向或变速,若能使所有目标的相对矢量都不与MINCPA圆相交,碰撞危险报警解除,则模拟航向或航速即为安全航向或航速。
(二)当采用真矢量显示时
本船模拟改向或变速,若能使本船和目标船真矢量矢端不相交,或PCP(或PPC)标志偏离本船航向线,或本船航向线不与PAD相交,且报警解除,则模拟航向或航速即为安全航向或航速。
(三)当采用仅存危险矢量显示时
本船模拟改向或变速,使屏幕上不显示任何矢量,报警解除,则模拟航向或航速即安全航向或航速。
四、利用ARPA协助避让应注意的事项
(1)最重要的是尽早发现和录取相遇船目标。一般要求8n mile外录取目标,在6n mile左右应判断出与本船的会遇结果。
(2)试操船结束,采取避让机动后,应继续观测和瞭望,以观其避让效果。如仍出现碰撞危险报警,则应考虑对方是否采取了不协调的机动。为此,可用尾迹功能检查,并进一步采取避让措施。
(3)狭水道雾航时,应避免在转向点与来船相遇。
(4)真矢量与相对矢量显示模式交替使用,互相验证。显示的综合图像与数据经常进行比较分析,有益于提高利用ARPA避让的可靠性。
(5)实施试操船结果必须符合国际海上避碰规则,避碰规则中有关雷达的条款,都适用于ARPA。
(6)未被录取和跟踪的目标存在着潜在的危险,ARPA不会加以报警。
资料卡
矢量靠泊法
设某船可以抛锚控制船速的最大航速为4kn,计划靠泊时间为1 830,当前时间为1 800,矢量时间为25min,本船速度3kn(可以抛锚制动),首先将矢量时间调整到30min,本船矢量线末端超出码头,说明本船靠泊提前,此时应适当调整航速,缩短矢量线长度,使其末端正好对准泊位。当船位快平泊位时,立即抛锚,船拖锚前进,航速锐减,这时再适当用车用舵将船靠上码头。
想一想
如何利用ARPA进行来船相遇态势的判断?
思考与训练
1. ARPA用于判断目标船的相遇态势用的是方法是。
A. 相对矢量判断 B. 真矢量判断 C. A、B都可以D. 以上都不对
2. 当目标船能够无危险通过本船船尾时,PAD的变化特点是。
A. 在PAD的移动过程中将与本船船首线相交
B. 在PAD的移动过程中不会与本船船首线相交
C. 在PAD的移动过程中可能与本船船首线相交,也可能不相交
D. 以上都不对
3. 利用ARPA协助避碰时,要求尽快发现和录取目标船,一般要求海里录取目标?
A. 6n mile外 B. 8n mile外 C. 10n mile外D. 12n mile外
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。










