



子模块二 目标的自动检测、录取和跟踪
学习目标:掌握目标检测、录取和跟踪方法;
掌握目标录取的特点和几种辅助控制方法。
重点难点:滑窗检测、自动录取、辅助控制、跟踪波门。
一、目标的自动检测
雷达信号检测即在噪声和杂波干扰背景中识别出存在的目标。在ARPA中,信号检测是在预处理后进行的,预处理只是改善了判别的条件,杂波预处理后的信号仍然存在杂波干扰,ARPA采用数字式滑窗检测器(Moving Window Detector)自动检测判别目标是否存在。
ARPA常用的数字式自动检测分为滑窗检测器和小滑窗检测器。
(一)滑窗检测器
ARPA连续采样的次数小于雷达距离扫描的次数。设备简单,通用性强,适用于距离扫描次数较多的场合,因此为目前多数ARPA所采用。
(二)小滑窗检测器
ARPA连续采样的次数等于雷达距离扫描的次数。为了判别信号和干扰,或即判断每一个量化单元内有无目标,采用M/N准则作为判据。M/N准则的原意是M OUT OF N,缩写为MOON准则。表示在N次探测中,若某量化单元内累积出现的回波“1”的次数≥M,则判断该单元内发现了目标,判定器输出“1”;否则,判断为无目标,判定器输出为“0”。
MOON判据中的M/N值的大小对ARPA自动检测性能有影响。N大,目标不易丢失,M大,不易发生误将干扰为目标的错误,检测可靠性高; D-ARPA的M/N=6/8,表示在连续8次探测中,出现回波“1”的次数为6以上,才认为该量化单元发现了目标,其检测性能比Sperry CAS-ⅡM/N= 2/3情况要好。
二、目标录取(捕捉)的方法及特点
ARPA的“目标录取”即选择需要跟踪的目标并进行跟踪,目标录取任务包括:目标距离、方位数据的录取及目标属性、尺度数据的录取。目前ARPA都只具有录取目标位置(距离和方位)数据的功能。
目标录取的方法有人工录取(Manual Acquisition)和自动录取(Auto-Acquisition)两种。
(一)人工录取
当人工录取时,操作人员用手摇动(或推动)操纵杆(如图6-8所示)或跟踪球(如图6-9所示),以控制输出的X、Y位置数码,从而控制由显示器电路产生的录取标志,即“□”(或“○”、“+”、“ . ”、“◇”等,各ARPA不同)在荧光屏上的位置。当录取标志套在欲录取目标的回波亮点上时,按下录取开关(Acquisition Switch),则此时录取标志的坐标数据(X、Y数据码)就作为被录取目标初始的位置数据并输入计算机存储器中,完成录取任务。此时,在已被录取目标回波的旁边便显示初始录取的符号(如:“^”、“ . ”等),ARPA启动跟踪电路,并在录取目标处设置扇形跟踪窗,跟踪窗中心将与目标回波中心自动重合,自动跟踪就从该位置开始连续跟踪。

图6-8 操纵杆

图6-9 跟踪球
人工录取的优点:可按危险程度做出先后录取的方案,录取目的性明确。一般先录取船首向、右舷、离本船近的相遇船;可根据需要逐个录取,运用观测经验,较容易在干扰背景中识别和录取目标,可以人工清除不再需要的目标。
人工录取的缺点:录取操作过程费时间,录取速度慢,尤其在多目标复杂情况下容易措手不及;如果观测疏忽,可能漏掉危险目标;目标运动情势及危险程度随时变化,对新出现的危险目标或丢失后又出现的目标的重新录取操作繁杂,且需连续观测,操作人员负担较重。
练一练
在ARPA模拟器上录取2个最重要的目标船,并读取数据。
(二)自动录取
自动录取是指:从发现目标到各个目标位置数据送入计算机的整个录取过程由ARPA自动完成,只有部分辅助控制由操作者介入。
自动录取的工作流程:自动检测设备根据M/N准则判定目标,然后根据送出的已发现目标的信号,去录取目标的距离、方位坐标数据并进行编码。为实现多目标录取,按照发现目标的先后进行时间编码。距离、方位及时间数码经排队控制,使之有序地经缓冲存储器送入计算机。
在“排队控制”处输入辅助控制信号以实现辅助控制,其作用是:
(1)使已录取的各目标坐标数据高速度、有次序地送入计算机;
(2)提高自动录取目的性,以有效利用ARPA录取总数。
ARPA还根据目标回波所占量化单元的面积来计算其中心、重心或稳心,以确定目标的位置,并实行连续自动跟踪。
三、ARPA常用的几种辅助控制的方法
(一)选择优先度
对目标的距离、方位、CPA、TCPA进行加权计算,得出录取优先度,如图6-10所示,是通过以CPA和TCPA值大小选择录取优先度,CPA和TCPA值越小,优先度越高,ARPA将按照A、B、C、D、E区先后次序录取目标。
(二)设置优先区
如图6-11所示,原则为前方优先,首先录取船首向±45°范围内的A区,然后依次录取B、C区内的目标,直到录取到最大录取数为止。但此原则未考虑避碰规则,尤其是没考虑局限性,驾驶员应该利用人工录取来补充重要目标。例如,B区(45°~90°)方位来船与A区来船,对B区来船,本船为让路船。同时,B区近距离目标船也比A区的远目标船更具碰撞危险。
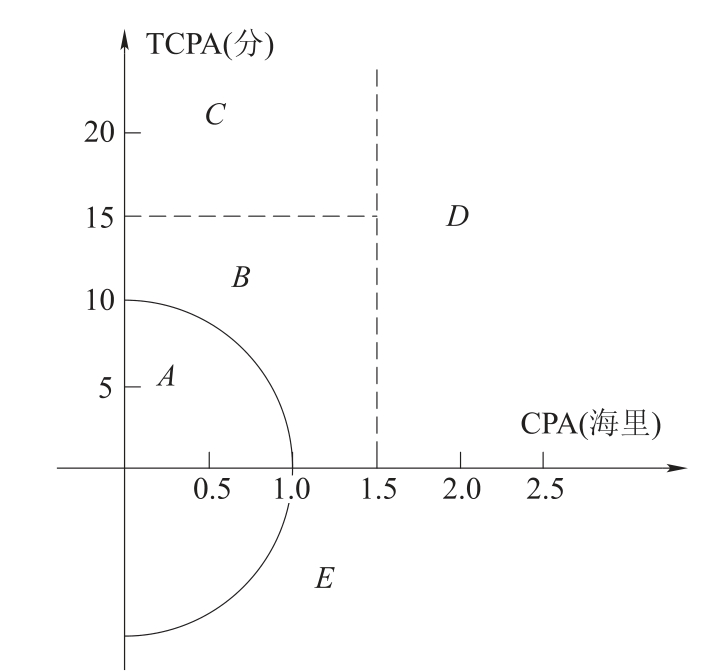
图6-10 选择优先度
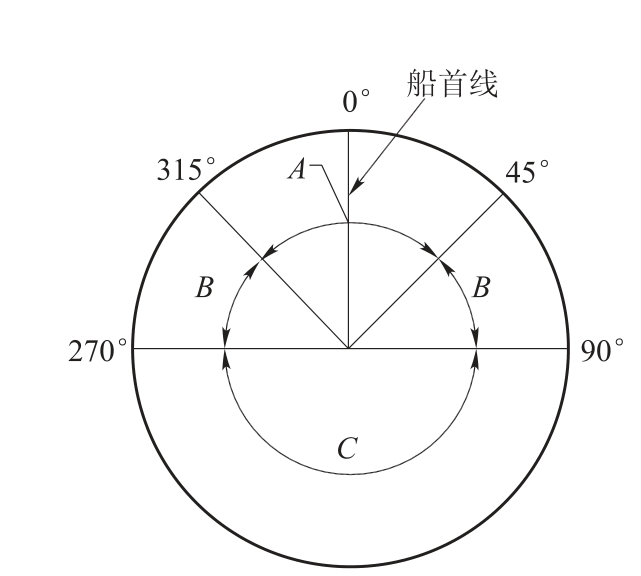
图6-11 设置优先区
(三)设置限制线
如图6-12斜线所示,由限制线构成的限制区是ARPA拒绝录取区,往往是陆地、岛屿等无需ARPA录取的区域,以提高自动录取的目的性与速度。
(四)设置警戒圈(环、区)
如图6-13所示。一般ARPA可设置2个警戒圈或2个扇形警戒区。警戒圈大小可调,扇形的径向深度、张角范围及警戒区的距离均可按需设置。也有可以设置2个半圆环警戒圈的ARPA,外环设置在船首方向,内环设置在船尾方向。其中警戒圈的半径可按需设定。
IMO性能标准要求:对闯入警戒圈(区、环)的目标,ARPA必须发出闯入报警(包括闯入时的音响报警及在闯入目标回波旁显示闯入标识符)。多数ARPA同时对闯入目标自动录取和跟踪。注意:对已经处在警戒圈(区、环)以内的目标,ARPA不报警,也不录取。
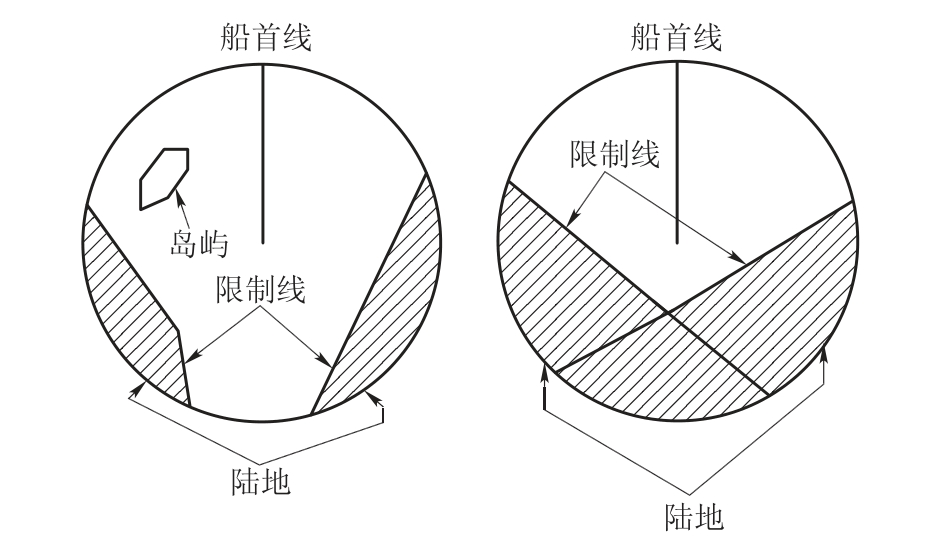
图6-12 设置限制区
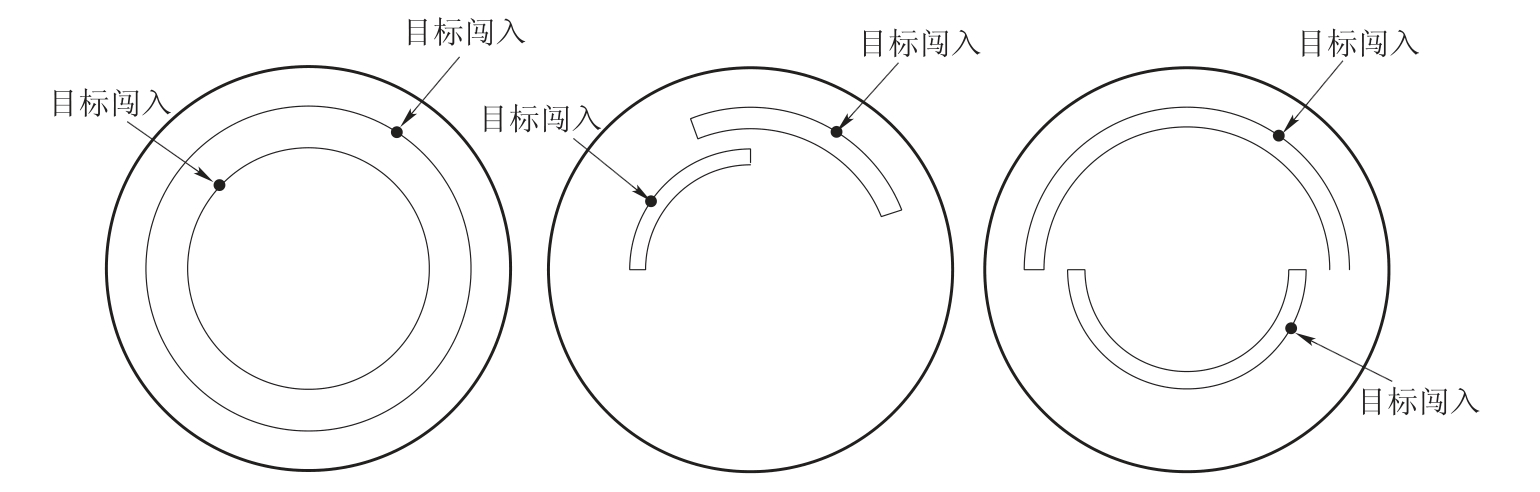
图6-13 设置警戒圈
ARPA的警戒圈基本都有内外两层,形成警戒深度,当目标闯入外层即开始录取和跟踪,当目标闯入内层后发出闯入报警,并显示识别符号,此种措施可以使自动录取与闯入报警分离,在报警前积累目标数据,防止虚警,减少漏警。
练一练
在ARPA模拟器上设置限制区。
自动录取的优点:ARPA可根据优先录取原则快速录取,可同时应付多目标情势,无须连续观测,在一定程度上可以减轻驾驶员负担。
自动录取的缺点:可能会造成虚假录取,即误将干扰、陆地或岛屿也当作目标录取;可能会漏录取处在杂波干扰区、甚至干扰区外的弱小目标,特别是在海浪中甚至能达到20%以上的目标丢失率;由于目前ARPA优先录取的准则较简单,有的还不尽合理,优先区的划分未提及目标船与本船的距离及运动态势是不全面的,自动录取的最小距离一般为0.5~1海里,有些甚至为3海里,因此其难以适应多目标且运动态势复杂的场合,可能会造成漏录危险度较大的目标而形成紧迫局面。
综上可知,人工录取与自动录取各有优缺点,应配合使用,可用“人工清除”(Man Cancel)功能,清除那些对本船已不太危险的目标,以便录取、跟踪更重要目标。
目前ARPA有关录取的数据如下:
(1)录取容量:不少于20个;
(2)录取精度:距离精度为20m,方位精度为0.1°;
(3)录取速度;从初始录取到建立跟踪所需时间一般为1~3min;
(4)录取分辨力:能够分别录取两个相邻目标坐标而不混淆的能力,一般为30~50m(目前港口交管雷达数据处理系统可达≤30m的水平)。
四、目标自动跟踪
观测目标位置的相继变化以建立其运动的过程,称为ARPA的“目标跟踪”。ARPA对目标的自动跟踪是采用天线边扫描(周期一般为3~4s)边跟踪的方式,录取所得到的各目标初始位置数据是孤立、离散的。接着要利用目标运动的航迹相关性,选择和识别出属于同一目标的位置数据,利用航迹外推预测出目标在下一次天线扫描到时的位置,并与实测值进行比较,同时进行修正,从而判明各目标的运动规律,这就是目标跟踪。
航迹外推:对目标未来位置的预测,即预测目标在下一次天线扫描到时的位置。
航迹相关:对新录取点迹和已有航迹之间归属关系的判别,判明新点迹是属于同一目标,还是属于其他目标,或者属于新发现目标,以建立各目标的航迹。
为识别所跟踪目标,并继续预测和跟踪,在预测位置设置一个扇形的跟踪窗(也叫跟踪波门),使其按照预测速度移动。下一次雷达采样时,预测位置与实测位置差小于跟踪窗尺寸(实测位置落在跟踪窗内),即实现了连续跟踪。
在ARPA中普遍采用α − β 跟踪滤波器作为上述航迹外推中的滤波处理器,其推算前提是目标做等速直线运动,α − β 跟踪滤波器是卡尔曼滤波器的简化形式,其构成简单可靠,容易实现。
(一)α − β 跟踪滤波跟踪法
平滑位置=预测位置+平滑系数×(实测位置−预测位置)
平滑速度=上次平滑速度+速度平滑系数×[(实测位置−预测位置)/采样周期]
预测位置=上次平滑位置+平滑速度×采样周期
ARPA首先记录目标首次录取时的位置,并以该位置设置跟踪窗。在下一次扫描时,如果在跟踪窗内发现目标,即可得目标的运动速度,假定目标保速保向,则可预测下一次扫描时目标的预测位置,ARPA在以此预测位置设置新的跟踪窗,若目标落在跟踪窗内,则跟踪基本成功,否则跟踪失败,重新开始跟踪。若实测位置与预测位置重合,说明上一次航向航速计算准确无误,可以以此继续航迹外推。实际上,预测位置与实测位置不能一次重合,需要按以上公式求取平滑位置与平滑速度,并预测下一次目标位置,再以此位置设置跟踪窗,进行下一次的采样实测、平滑修正、位置预测。随着采样次数的增加,预测与实测目标的位置差越来越小,最终实现预测与实测基本一致,从而实现自动跟踪目标,如图6-14与图6-15所示。
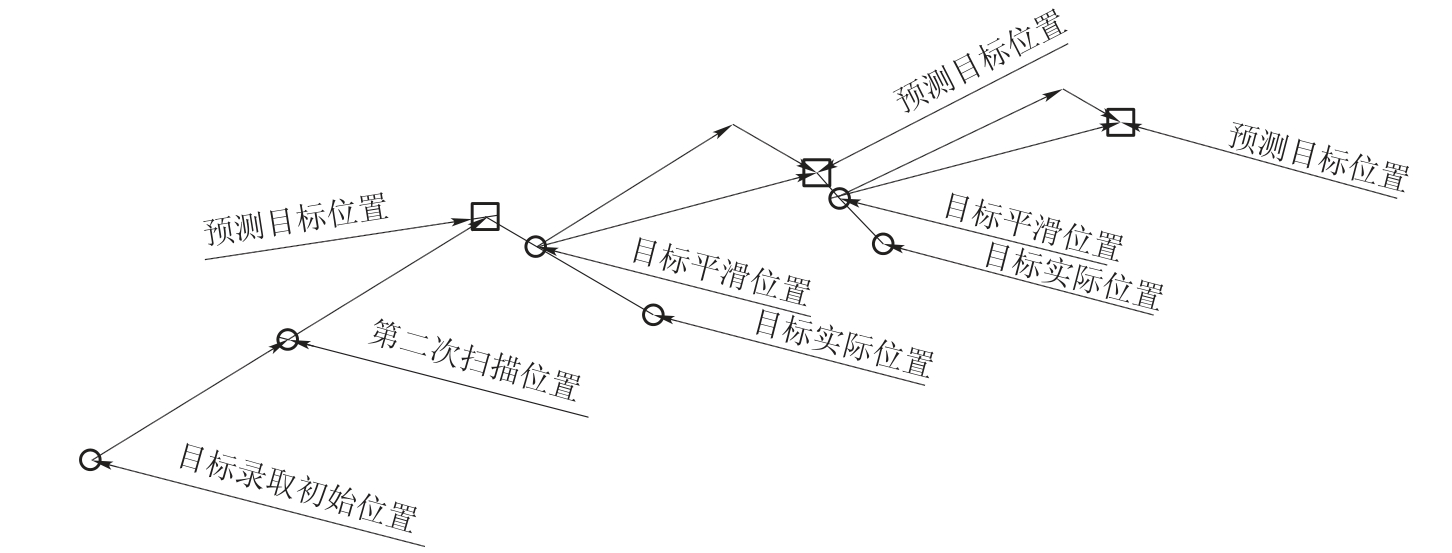
图6-14 跟踪过程示意图
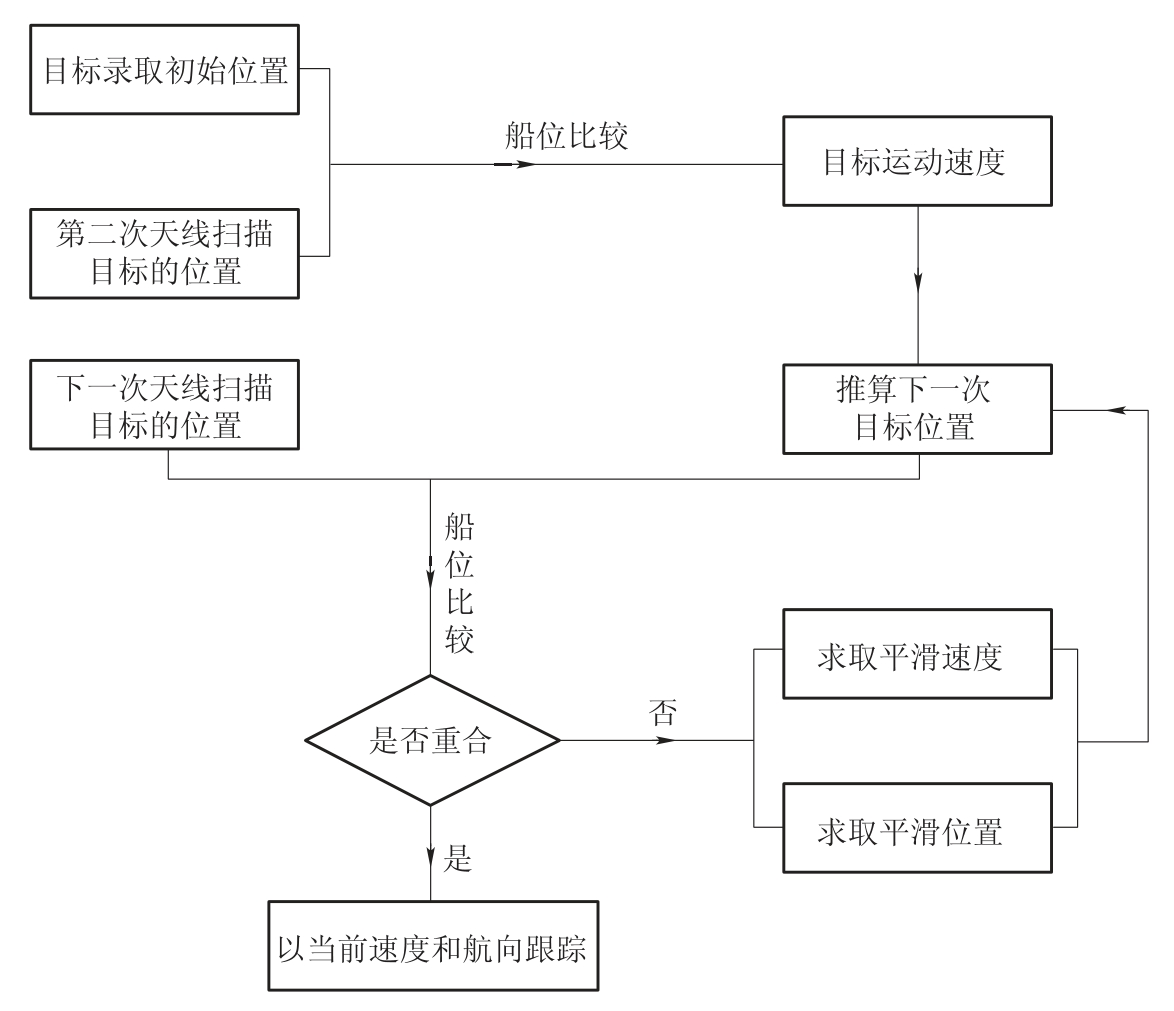
图6-15 跟踪过程
资料卡
α−β跟踪滤波算法
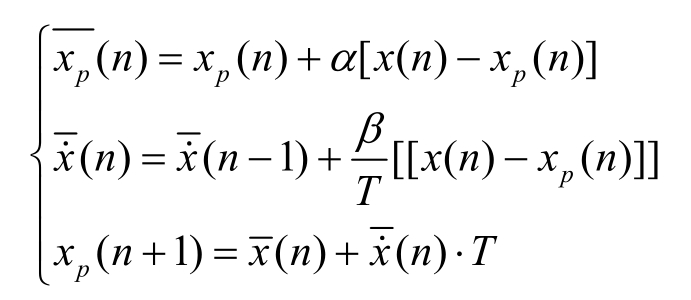
式中:T—采样周期,x(n) —第n次采样实测位置,xp(n)—第n次采样预测位置, (n)—第n次采样平滑位置,
(n)—第n次采样平滑位置, (n)—第n次采样平滑速度,α —位置平滑系数,β —速度平滑系数。
(n)—第n次采样平滑速度,α —位置平滑系数,β —速度平滑系数。
(二)跟踪波门性能及特点
由此可知,α−β 跟踪滤波器的跟踪过程就是根据实测位置求取目标预测位置与平滑位置,预测位置为中心设置一个“跟踪窗”或“跟踪波门”,亦称“相关范围”、“相关波门”,还可简称“波门”。
波门尺寸应保证在下一次采样到来时,对同一目标的预测与实测位置差修正后的“平滑位置”处在该波门内,以保持连续跟踪。凡进入波门的信号就认定为同一目标的新点迹;否则,就认定为其他目标的点迹。
跟踪波门(跟踪窗)是个扇形窗,在自动跟踪系统中用直角坐标描述,如图6-16所示。
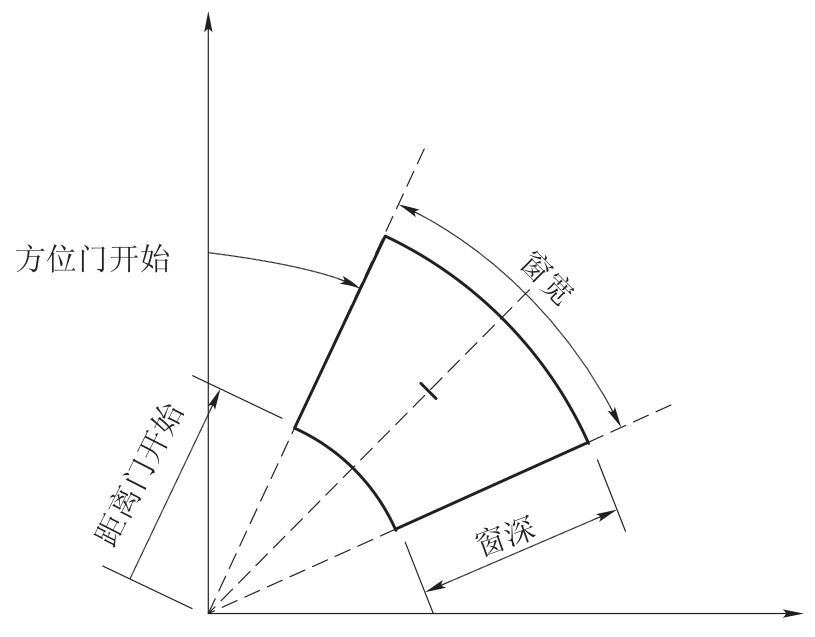
图6-16 跟踪窗
波门中心坐标使用时置于预测位置,该扇形窗在录取目标时,称为录取波门;在建立航迹进入跟踪后,称为跟踪波门。
录取波门应足够大,以便录取成功并建立起航迹。但录取波门又不可太大,否则将降低录取分辨力,即相邻目标的点迹容易同时进入该波门而出现目标混淆。
跟踪波门的窗深ΔR=量程×8.5%;窗宽ΔA=10个方位量化单元。跟踪波门尺寸小,有利于提高跟踪精度和分辨力。但尺寸不能太小,否则跟踪过程中容易丢失目标;也不能太大,否则容易发生误跟踪使航迹混淆。
为了适应不同尺寸的目标、目标机动及跟踪误差在建立航迹过程的变化等种种情况,波门尺寸的大小应能自适应调整。
目前ARPA常用下列两种方法设置波门:检测目标面积,设置波门尺寸。
1. 检测目标面积
根据自动检测得到的目标几何面积设置波门尺寸,使目标面积占波门总面积的75%,剩余面积是考虑因目标机动或变换量程等其他因素影响而留有余地。
2. 设置波门尺寸
设置大、中、小三种波门尺寸,在跟踪过程中进行自适应调整。如图6-17所示,通常在录取目标时,用大波门;建立跟踪后用中波门;进入稳定跟踪后,用小波门。尺寸连续可变的跟踪窗,其尺寸一般随目标尺寸发生变化,一旦进入稳定跟踪,窗尺寸与目标亮点大小一致,形成窗楣。在稳定跟踪过程中,若目标因发生机动或其他因素未入小波门,则自动改用中波门;若能恢复跟踪目标,则再改用小波门;未能恢复跟踪,则改用大波门,待进入跟踪后,再改用中波门,小波门;若用大波门连续10次天线扫描,有5次或以上目标均未能进入大波门,则判定为目标丢失,发出目标丢失报警。
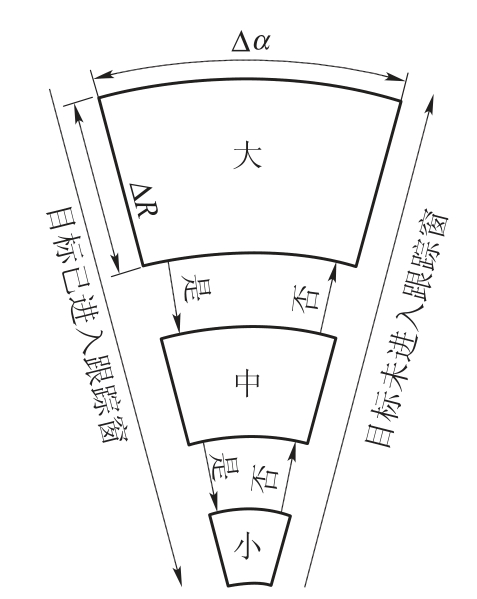
图6-17 跟踪窗尺寸变化
思考与训练
1. 有自动录取功能的ARPA,在用手动录取时,按IMO标准规定,至少可录取个目标。
A. 10 B. 20 C. 30 D. 40
2. 当目标突然出现在ARPA警戒区(环)内时,ARPA。
A. 录取,并报警 B. 不录取,不报警
C. 录取,不报警 D. 不录取,但报警
3. ARPA自动跟踪目标的过程是。
A. 小波门→中波门→大波门→稳定跟踪 B. 中波门→大波门→小波门→稳定跟踪
C. 小波门→大波门→中波门→稳定跟踪 D. 大波门→中波门→小波门→稳定跟踪
4. 在ARPA跟踪器中,新的波门位置是以为中心设置的?
A. 从实测位置出发用实测速度预测的位置
B. 从实测位置出发用估值速度预测的位置
C. 从估值位置出发用估值速度预测的位置
D. 从估值位置出发用实测速度预测的位置
5. ARPA能保持连续跟踪的条件是。
A. 在10圈天线扫描中,有连续5次能清楚显示目标
B. 在10圈天线扫描中,有连续8次能清楚显示目标
C. 在10圈天线扫描中,有5次能清楚显示目标
D. 在8圈天线扫描中,有4次能清楚显示目标
6. 有关ARPA的目标录取,下列说法是不正确的?
A. ARPA可以自动录取目标,但不能自动跟踪
B. 目前ARPA都只具有录取目标位置数据的功能
C. 理想的目标录取应包括:目标初始位置数据及初始特征参数
D. 目标录取的任务是目标初始距离、方位数据的录取,并送入计算机
7. 下列说法是正确的。
A. 目标的录取可采用自动录取,也可采用手动录取
B. 自动录取时应注意存在最近录取距离限制
C. 一旦录取操作完毕,该目标立刻即被稳定跟踪
D. A、B都正确
8. 人工录取目标的原则是。
A. 先录取船首方向,特别是右舷的近距离目标
B. 先近后远
C. 先正横后两舷
D. A、B
9. 利用ARPA录取目标功能时:。
A. 自动录取方便、快速,因此应尽量选用自动录取
B. 手动录取速度虽慢,但可按需录取,因此应尽量选用手动录取
C. 自动录取目的性差又存在近距内限,因此一般不宜选用
D. 应根据航行环境态势,酌情选用录取模式
10. 有关ARPA的目标录取,下列说法是正确的。
A. 目标录取是指对需要跟踪目标的选择及跟踪的开始
B. 一旦录取操作完毕,该目标立刻被稳定跟踪
C. 目标录取还包括目标属性、尺度数据的录取,并送入计算机
D. 自动录取时仅录取那些与避让有关的目标
11. 采用手动录取方式时,超越ARPA录取容量后的目标,。
A. 也可自动录取 B. 无法再录取
C. 在清除一个已跟踪目标后,可以再录取 D. 以上均不对
12. ARPA自动录取目标的优点是:。
A. 先录取船首方向,特别是右舷近距离目标
B. 自动清除不需要的目标
C. 录取目标速度快
D. A+B+C
13. ARPA自动录取中“限制区”的意义是。
A. 优先录取区 B. 拒绝录取区
C. 自动录取区 D. 人工单独录取区
14. 利用警戒圈进行自动捕捉时,ARPA能捕获的物标是的目标。
A. 对本船有危险 B. 正在闯入警戒圈
C. 位于警戒圈内 D. 在警戒圈外
15. 为提高ARPA自动录取目标的目的性和速度,当选用自动录取功能时,驾驶员可作下列哪种操作?
A. 设置优先区 B. 设置导航线
C. 设置限制区(线)或警戒区(圈) D. A、C均可
16. 在ARPA中,设定限制区的目的是。
A. 提高自动录取的目的性 B. 提高自动录取的速度
C. 提高手动录取的目的性 D. A+B
17. 你船航向000°,利用ARPA 自动录取目标时设置060°、300°两条限制线,则下列哪一方位上的目标可能被录取?
A. 300°~060° B. 120°~240°
C. 180°~090° D. 以上均能录取
18. 在ARPA中,设“排队控制”的办法其目的是。
A. 提高自动录取的目的性和速度 B. 提高手动录取的目的性和速度
C. 提高自动跟踪速度和精度 D. 上述三者都不对
19. ARPA雷达手动录取或自动录取都有最小跟踪距离,一般为。
A. 0.5~1.0海里 B. 1.0~1.5海里
C. 0~1.5海里 D. 0~2海里
20. 使用ARPA人工录取目标的原则是。
A. 右舷,左舷,船首,近距离 B. 左舷,右舷,船首,近距离
C. 右舷,船首,左舷,近距离 D. 船首,右舷,左舷,近距离
21. ARPA的跟踪窗(波门)的大小,在整个跟踪过程中。
A. 一直是固定不变的 B. 起始跟踪时大,稳定跟踪后小
C. 起始跟踪时小,稳定跟踪后大 D. 其大小由操作者酌情选定
22. ARPA跟踪窗尺寸越小,则会使
A. 跟踪精度越高,但易丢失 B. 跟踪精度越低,不易丢失
C. 跟踪容量越大,但易丢失 D. 跟踪容量越小,不易丢失
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。











