



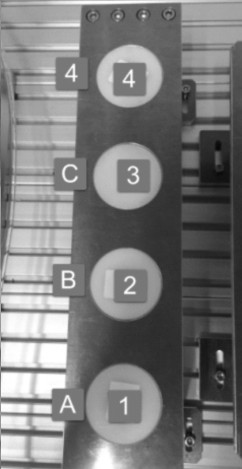
【摘要】:通过机械手抓取吸盘工具,然后通过吸盘吸取抓取位中的任意工件,放置在读码器上读取该产品的信息,收到信息后,对工件进行排序。
机器人IO输入、逻辑判断、读码器应用练习。
通过机械手抓取吸盘工具,然后通过吸盘吸取抓取位中的任意工件,放置在读码器上读取该产品的信息,收到信息后,对工件进行排序。

图(1)

图(2)

图(3)
图(4)

◇抓取吸盘工具时,一定要慢速操作,并且调整到合适的姿态,避免被气管干扰到。
◇吸取工件时,至少延时1s。
◇对工件进行读码操作时,尽量接近读码器,在条件允许的情况下,可不放下工件进行读码。
◇程序编写完成后,一定要以单步运行的方式完整地运行一遍程序,以保证安全。
(1)建立IO输入端

(2)编写程序
1)建立main程序和子程序

2)主程序调用

3)Hand_tool工具抓取

4)Down_tool工具放回
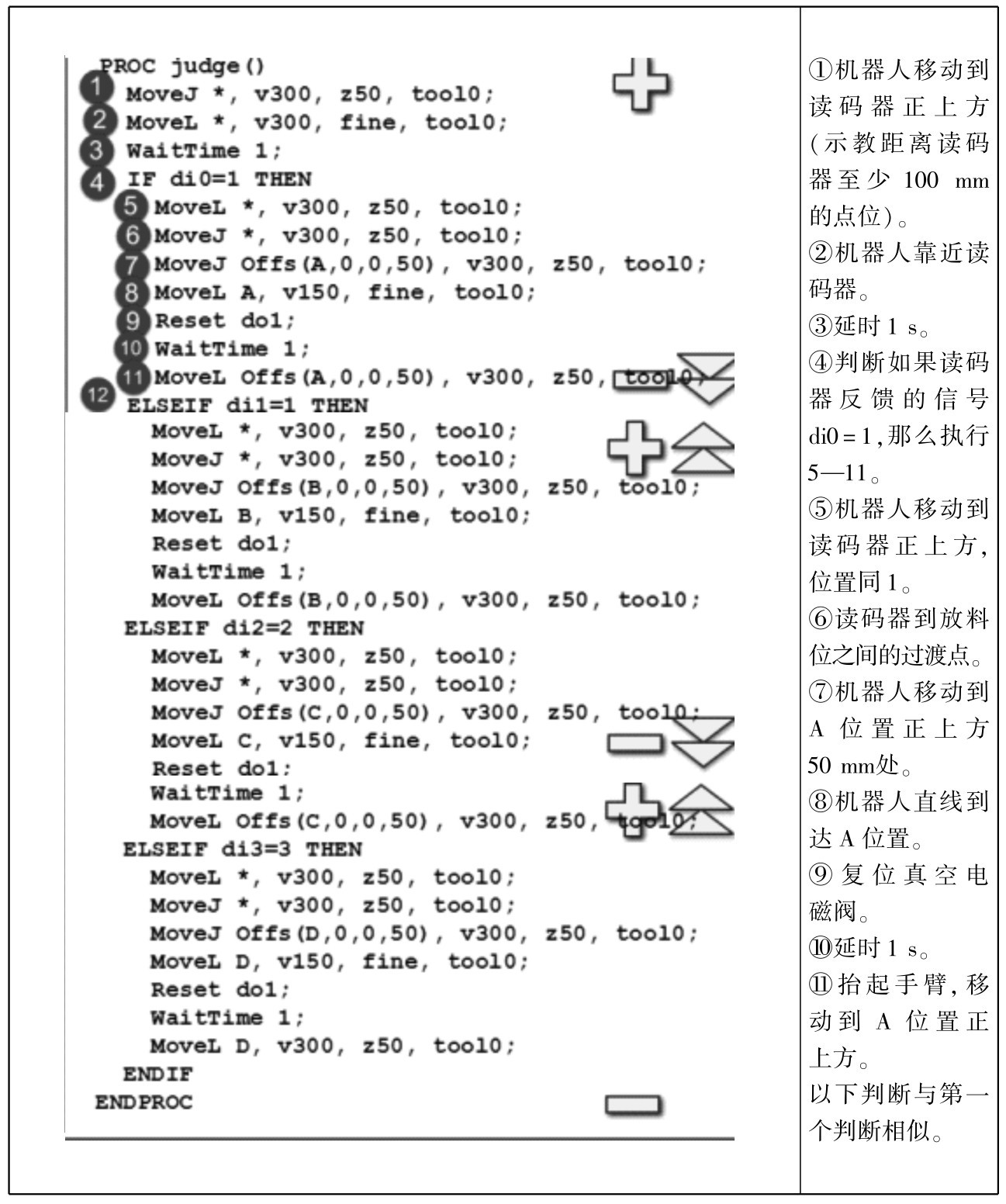
5)Judge判断子程序

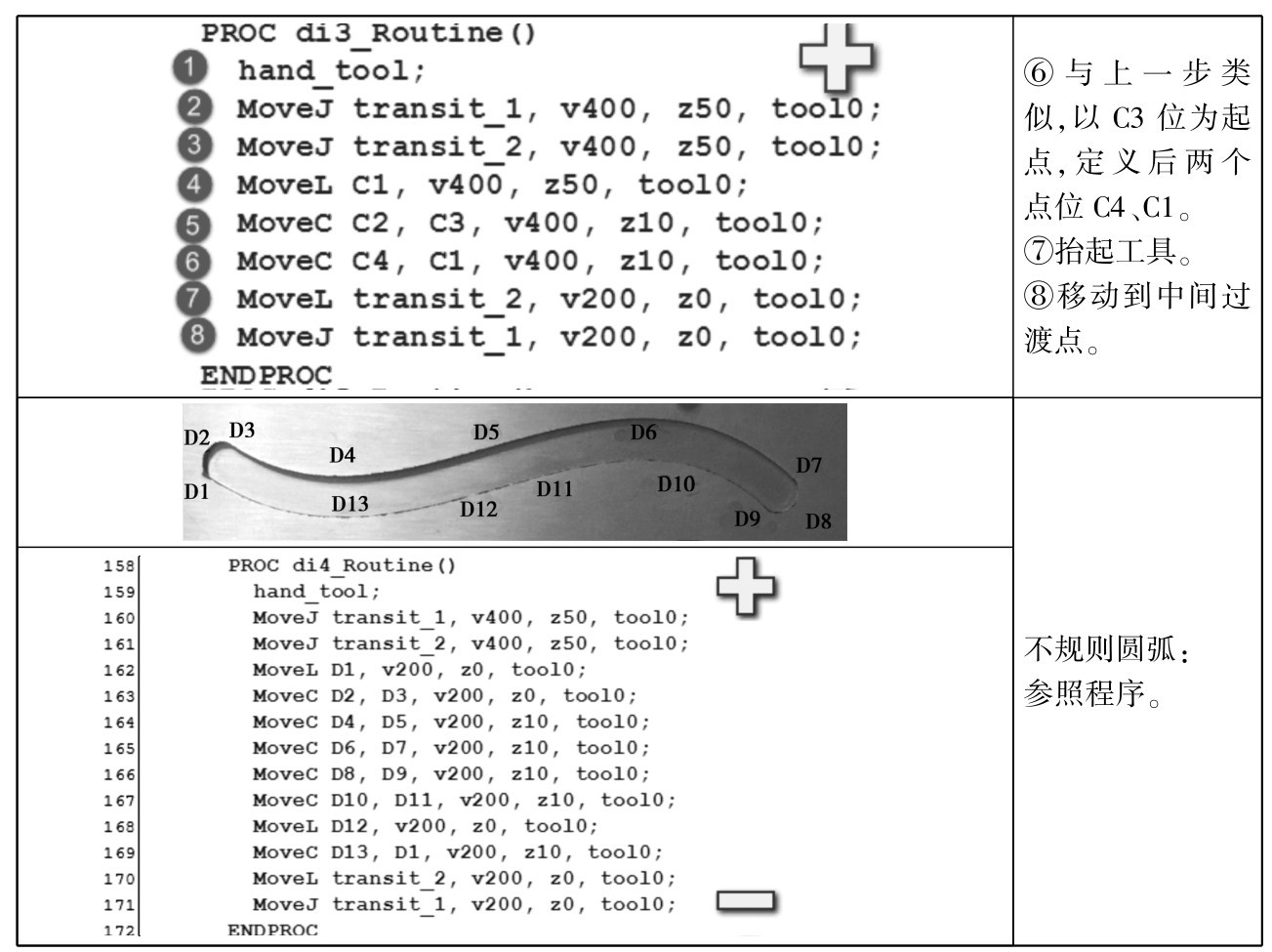
6)Work_process顺控流程子程序
7)扩展任务
利用所学的知识或者相对位置移动坐标等优化程序结构。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。









