



【摘要】:第一种是要求对于选定的轨迹结点(插值点)上的位姿、速度和加速度给出一组显式约束,轨迹规划器从一类函数选取参数化轨迹,对结点进行插值,并满足约束条件。不熟悉编程的情况下不建议使用跳转指令编程,应逐一对轨迹定点进行示教,当完成一部分程序应返回程序起始点单步试运行,保证程序正确以及人身安全。
机器人工件坐标、轨迹规划、程序编写操作练习。
轨迹规划指的是机械臂末端行走的曲线轨迹,或是操作臂在运动过程中的位移、速度和加速度的曲线轮廓。
操作臂最常用的轨迹规划方法有两种:
第一种是要求对于选定的轨迹结点(插值点)上的位姿、速度和加速度给出一组显式约束(例如连续性和光滑程度等),轨迹规划器从一类函数(例如n次多项式)选取参数化轨迹,对结点进行插值,并满足约束条件。
第二种方法要求给出运动路径的解析式。
任务:在任务1的基础上,按照“中华冶字样轨迹完成轨迹规划练习。
任务:

 将轨迹路径图固定在台面上保证示教过程中不会发生偏移,导致示教位置发生偏差,影响程序的正确性。
将轨迹路径图固定在台面上保证示教过程中不会发生偏移,导致示教位置发生偏差,影响程序的正确性。
 设计轨迹路径是以路线拐角点或线性中点(例如Move C需要定义圆弧上的点)示教为主,便于标注、检查。
设计轨迹路径是以路线拐角点或线性中点(例如Move C需要定义圆弧上的点)示教为主,便于标注、检查。
 不熟悉编程的情况下不建议使用跳转指令编程,应逐一对轨迹定点进行示教,当完成一部分程序应返回程序起始点单步试运行,保证程序正确以及人身安全。
不熟悉编程的情况下不建议使用跳转指令编程,应逐一对轨迹定点进行示教,当完成一部分程序应返回程序起始点单步试运行,保证程序正确以及人身安全。
(1)建立工具坐标(参考实例一)
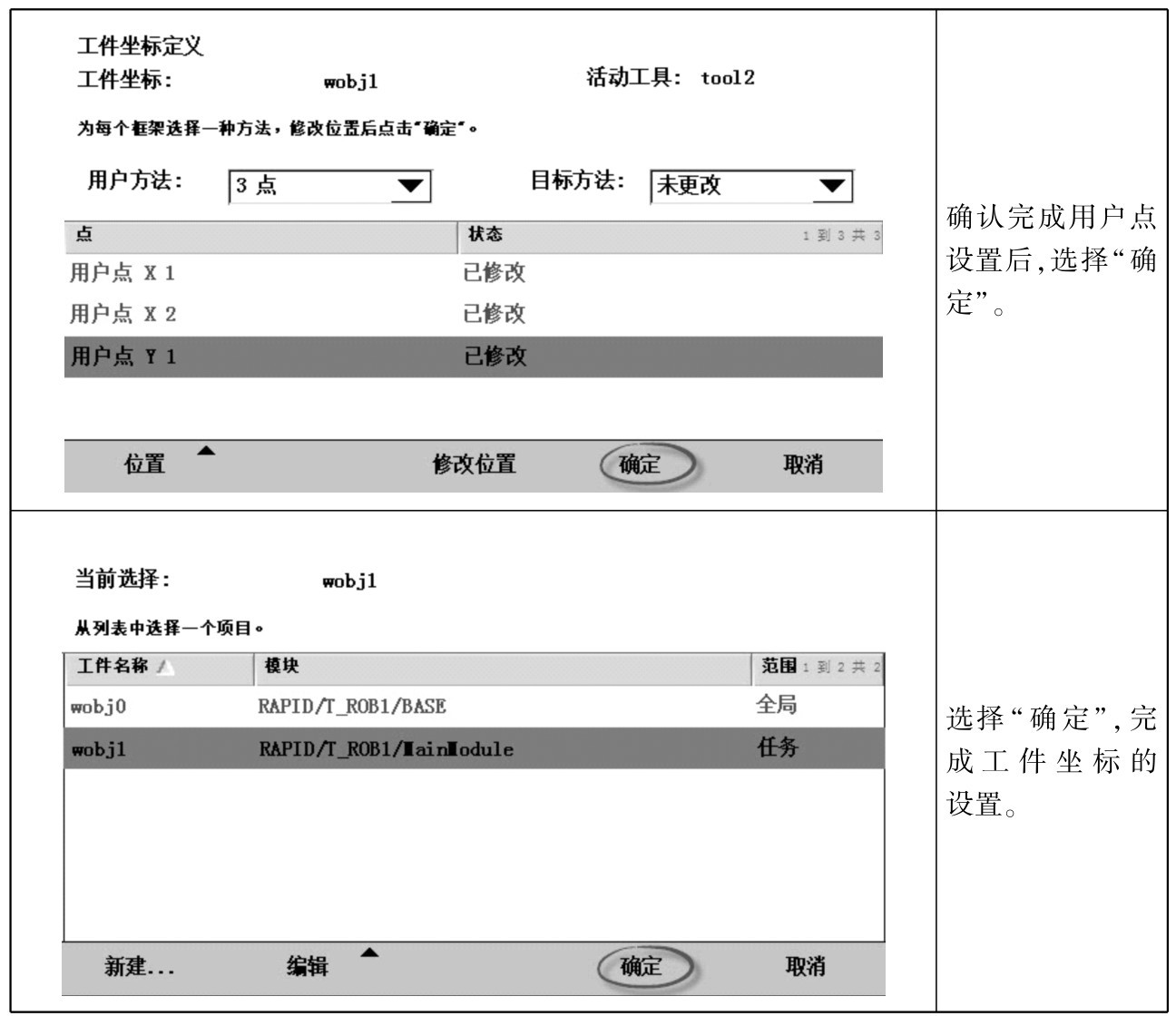
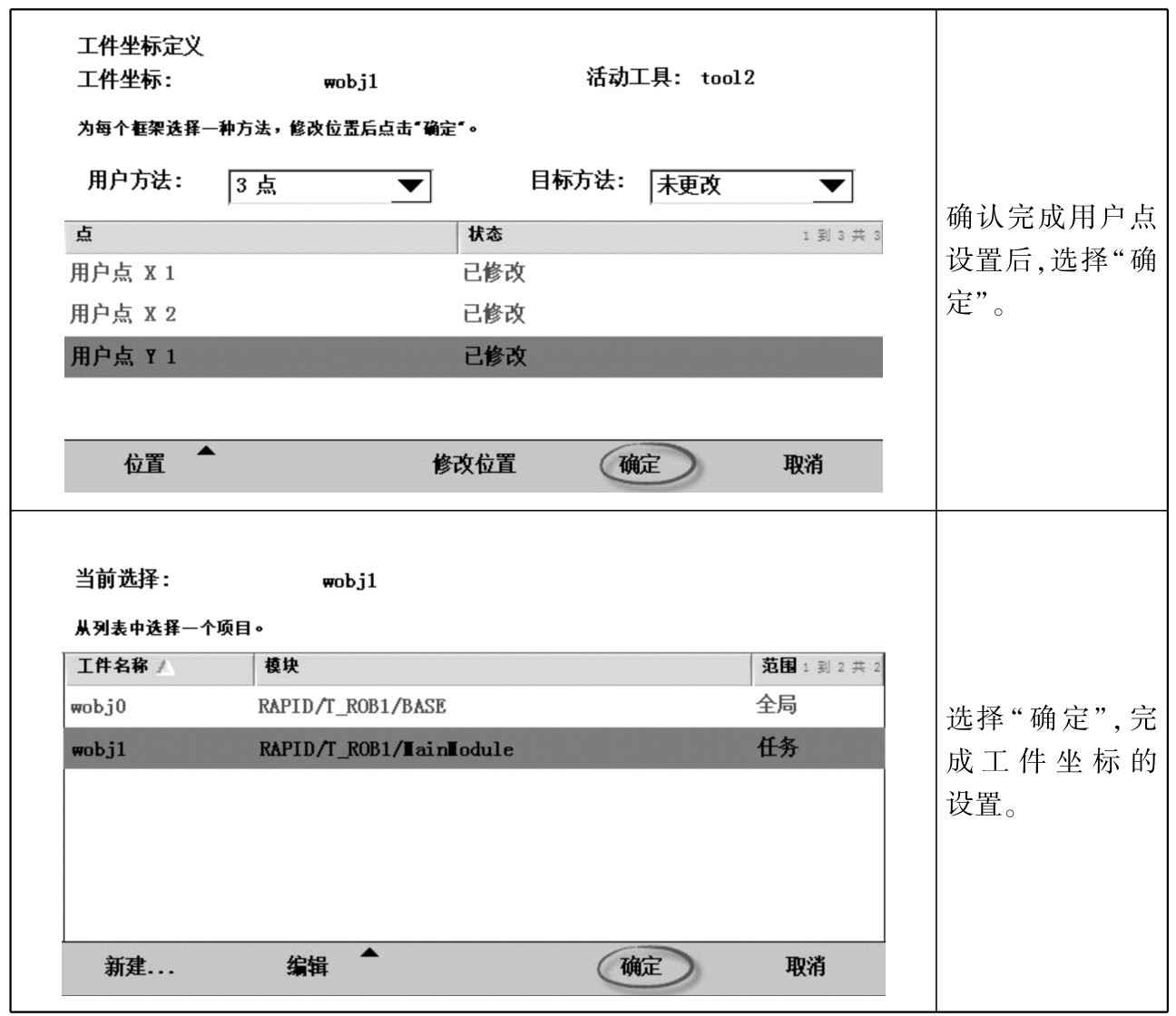
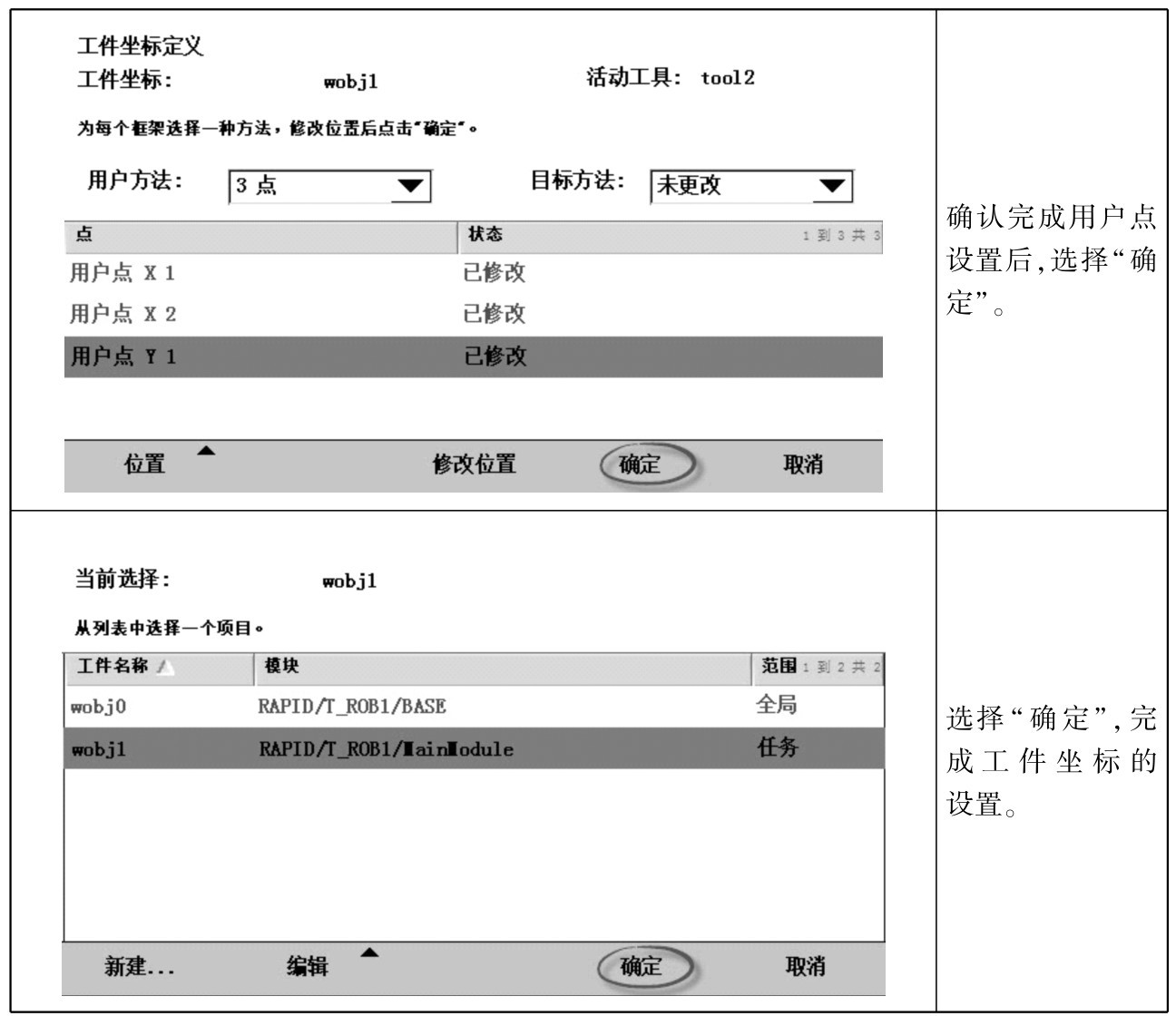
(2)建立工件坐标
工件坐标:具体设置步骤如下:




(3)编写main主程序

免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。










