



6.2.3 线性预测滤波
线性预测是一种统计内插方法,它考虑相邻点间的相关性,特别适用于内插数字表面模型和数字地面模型。该方法既可基于规则格网,也可基于不规则三角网来实现。该算法的具体实现可参阅有关文献(Kraus,1997;Lohmann,et al,1999;Koch,1999;Lohm-ann,et al,2001)。处理时,将测区分成等间隔的小方块(如图6-3),方格大小依据点的密度大小和分布特征可预先设定,在处理每一个目标方格单元时,同时考虑其周围八邻域小方格的数据点,那么就能根据9个相互毗邻的单元格内的数据点利用最小二乘方法计算该区域的趋势面(移动平面)系数。拟合的趋势面表达成:
Zi=a0+a1Xi+a2Yi (6.8)
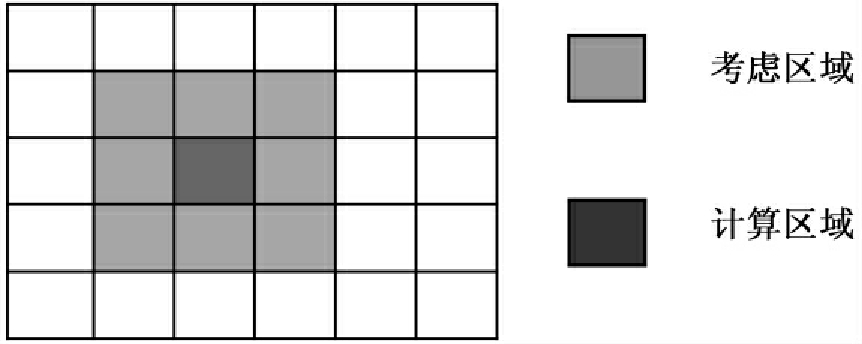
图6-3 分块计算示意图
每个数据点高程的最小二乘平差的计算值与数据点高程的实际观测值之差就是所谓的“中心化观测值”li(拟合残差),即
li=Zi-obsi (6.9)
假设li呈正态分布,且标准偏差为σZ(最小二乘计算得到),给定一个乘数因子fac,设定阈值(容忍因子)为:
TZ=fac·σZ (6.10)
如果处理单元方格内数据点的中心化观测值超过了设定的阈值TZ,就认为该数据点是“粗差”而在进行下一次计算前被“过滤”(不参加下一次的计算,不是真正意义上的粗差剔除),重复上述过程,直到所有的数据点满足阈值条件,且趋势面稳定为止。在重复计算过程中,标准偏差显著减小。只从数据集中剔除处理单元中奇异高程的数据点(真正意义上的粗差剔除),而应保留邻近单元格中判断为奇异点的数据,以用于计算下一个处理单元方格。
线性最小二乘的协方差函数由下式定义(Kraus,1997):

式中,两点Pi、Pk间的协方差取决于两点间的间距,两点间相隔越近,协方差值越大。随着两点间距离的增加,协方差趋近于零(见图6-4);参数C(0)为信号协方差函数的峰值,它表示高程偏差中系统误差和随机误差成分的比例关系,如果C(0)=1.0,就认为没有随机误差,一般C(0)=0.99;参数B为坡度参数因子。协方差函数的峰值越大,方差σ2Z就越小,滤波效果就越弱(Jacobsen,2001)。
Pi点的线性预测值由下式估计:

式中,

协方差矩阵的对角线元素为中心化观测值的方差,假定所有观测值等权,即Vzz=1.0。该方法要进行两次阈值处理:①比较li和Tz;②比较 和lpre。
和lpre。
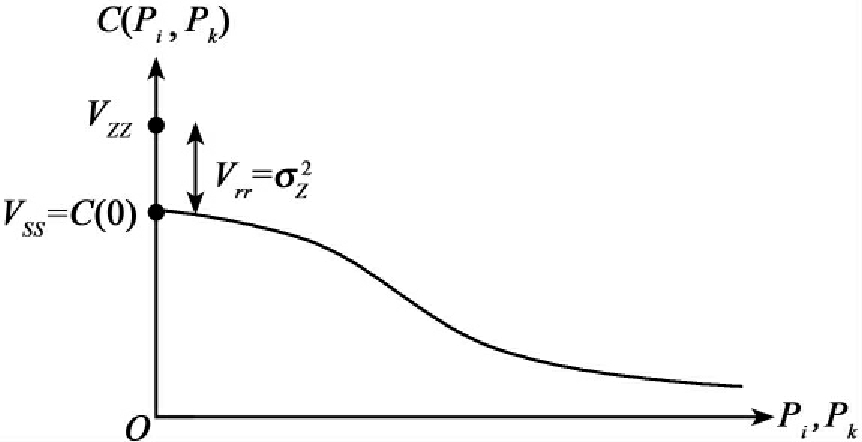
图6-4 协方差函数关系描述

基于上述方法,图6-5(见彩图插页)给出了重建后的DEM。
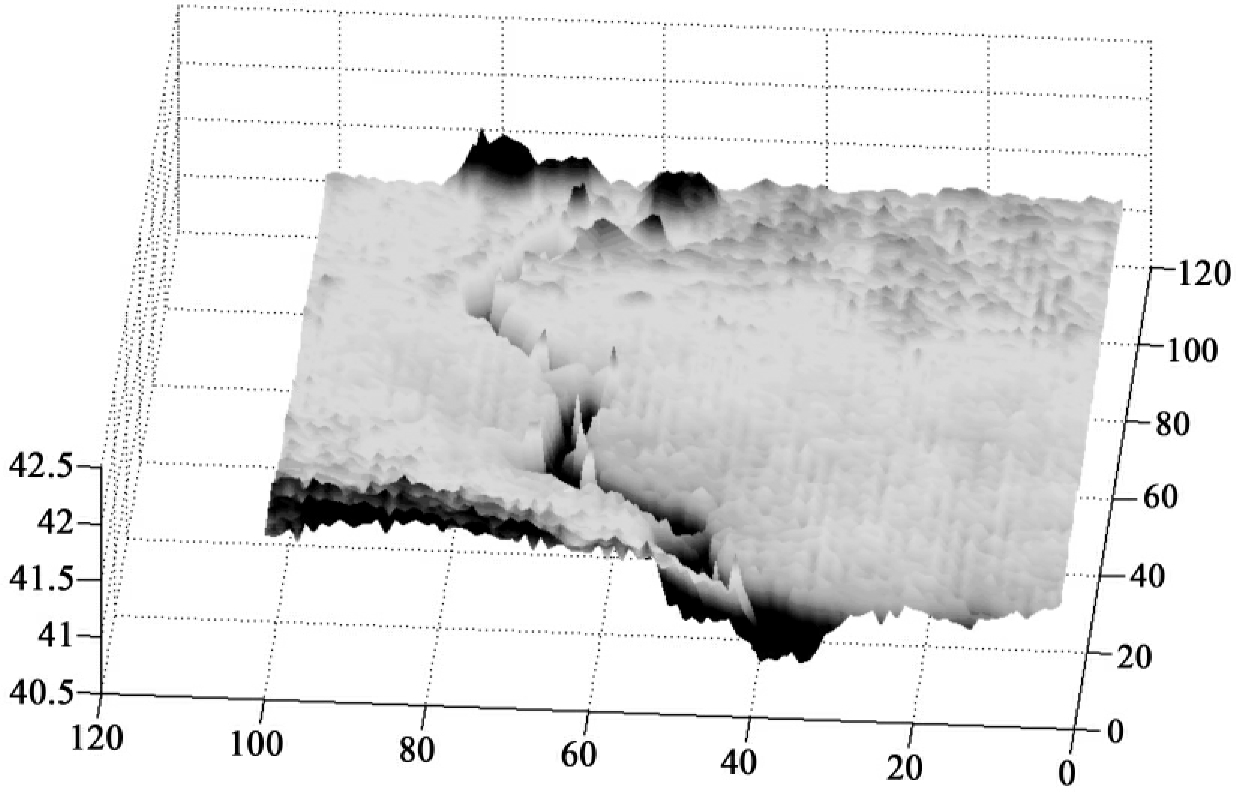
图6-5 DEM三维重建
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。











