



5.5 霍尔传感器
霍尔传感器(Hall Sensor)同下述其他磁敏传感器件一样,都是能敏感磁场的变化,并将其转换成电信号输出的传感器,目前应用日趋广泛。
5.5.1 霍尔元件及霍尔效应
霍尔元件是利用霍尔效应制作的一种磁电转换元件。如图5-11,一块长为l,宽为w,厚为d的N型半导体薄片。在l的两端制有面接触型输入电流极(控制电极),在w的两端制有点接触型输出电压极(霍尔电极),即构成了霍尔元件。将它置于磁感应强度为B的磁场中,B垂直于l-w平面。当沿l向通以电流I时,N型半导体中的载流子(电子)将受到磁场B产生的洛仑兹(Lorentz)力FL的作用而向一侧面偏转,使该侧面上形成电子积累,而相对的另一侧面上则因缺少电子而出现等量的正电荷,从而在这两个侧面间形成霍尔电场EH(P型半导体的电场方向与此相反)和电位差UH,即霍尔电势:

图5-11 霍尔元件及霍尔效应原理图

式中:RH=1/en称为霍尔系数(符号:P型半导体取“+”,N型半导体取“-”),与材料本身的载流子浓度n有关;e为电子电量。因为UH随I而变,I称为元件的控制电流。
这种由导电材料(金属导体或半导体)中电流与外磁场相互作用而产生电动势的物理现象称为霍尔效应。通常,把式(5-20)改写成

式中

称为霍尔元件的灵敏度。
由式(5-21)可见,厚度d愈小,则UH越大,元件越灵敏。利用砷化镓外延层或硅外延层为工作层的霍尔元件,d可以薄到几微米(l和w可小到几十微米)。利用外延层还有利于霍尔元件与配套电路集成在一块芯片上。因KH=RH/d=(end)-1,外延层的电阻率越高(n越小),则元件越灵敏。深入的分析还表明,载流子电子的迁移率(μ)越高,则器件越灵敏。半导体的电子迁移率远大于空穴,所以霍尔元件大多采用N型半导体。砷化镓霍尔元件的灵敏度高于硅霍尔元件。霍尔电极位于l/2处,是因为这里的UH最大。
5.5.2 霍尔元件主要特性参数
(1)乘积灵敏度KH 即单位磁感应强度和单位控制电流下所得到的开路(RL=∞)霍尔电势。
(2)额定控制电流Icm 指空气中的霍尔元件产生允许温升ΔT=10℃时的控制电流:

式中:αs为元件的散热系数,ρ为元件工作区的电阻率。一般Icm为几毫安到几百毫安,与元件所用材料及其尺寸有关。
(3)输入电阻Ri、输出电阻RoRi为霍尔元件两电流电极之间的电阻,Ro为两个霍尔电极之间的电阻。
(4)不等位电势Uo和不等位电阻ro 无外磁场时,霍尔元件在额定控制电流下,两霍尔电极之间的开路电势称为不等位电势Uo。它是由于工艺制备限制,使两个霍尔电极位置不能精确同在一等位面上造成的输出误差,要求Uo愈小愈好,一般要求Uo<1mV。
不等位电阻定义为ro=Uo/Icm,即两个霍尔电极之间沿控制电流方向的电阻。ro愈小愈好。
(5)寄生直流电势UoD 当不加外磁场,元件通以交流控制电流时,霍尔元件输出端除出现交流不等位电势以外,如还有直流电势,则称之谓寄生直流电势。产生UoD的原因主要是元件本身的四个电极没有形成欧姆接触,有整流效应。
(6)霍尔电势温度系数α 即:在一定的磁感应强度和控制电流下,温度每变化1℃时的霍尔电势的相对变化率。α有正负之分,α为负表示元件的UH随温度升高而下降;α愈小愈好。砷化镓霍尔元件为10-5/℃数量级,锗、硅元件为10-4/℃数量级。
(7)工作温度范围 由于在式(5-20)中含有电子浓度n,当元件温度过高或过低时,n将随之大幅度变大或变小,使元件不能正常工作。锑化铟的正常工作温度范围是0~+40℃,锗为-40~+75℃,硅为-60~+150℃,砷化镓为-60~+200℃。
5.5.3 不等位电势和温度误差的补偿
1.不等位电势的补偿
霍尔元件在制造过程中要完全消除不等位电势是很困难的,因此有必要利用外电路来进行补偿。
在直流控制电流的情况下,不等位电势的大小和极性与控制电流的大小和方向有关。在交流控制电流的情况下,不等位电势的大小和相位随交流控制电流而变。另外,不等位电势与控制电流之间并非线性关系,而且Uo还随温度而变。
为分析不等位电势,可将霍尔元件等效为一电阻电桥,不等位电势Uo就相当于电桥的不平衡输出。因此,所有能使电桥平衡的外电路都可以用来补偿不等位电势。但应指出,因Uo随温度变化,在一定温度下进行补偿以后,当温度变化时,原来的补偿效果会变差。

图5-12 几种不等位电势的补偿电路
图5-12(a)是不对称补偿电路,在未加磁场前,用调节Rw可使Uo为零。由于Rw与霍尔元件的等效桥臂电阻之电阻温度系数不相同,当温度变化时,初始的补偿关系将被破坏。但这种方法简单、方便,在Uo不大时,对元件的输入、输出信号影响不大。图5-12(b)为五端电极的对称补偿电路,对温度变化的补偿稳定性要好,缺点是使输出电阻增大。
当控制电流为交流时,可用图5-12(c)的补偿电路,这时不仅要进行幅值补偿,还要进行相位补偿。
图5-12(d)把不等位电势Uo分成恒定部分UoL和随温度变化部分ΔUo,分别进行补偿。UoL相应于允许工作温度下限tL时的不等位电势。电桥的一个臂接入热敏电阻R(t)。设温度tL时电桥已调平衡,不平衡电势UoL用调节Rw1进行补偿。设工作温度上限tH时,不等位电势增加了ΔUo,则用调节Rw2进行补偿。适当选择热敏电阻R(t),可使从tL到tH之间各温度点都能得到较好的补偿。当R(t)与霍尔元件用相同材料,则可以达到相当高的补偿精度。
2.温度误差及其补偿
霍尔元件的霍尔系数RH、电阻率ρ和载流子迁移率μ都是温度的函数,因此UH、输入电阻Ri和输出电阻Ro也都是温度的函数,从而在使用中会产生温度误差。所以,一方面要采用温度系数小的元件,另一方面应根据精度要求进行温度误差补偿。
图5-13为一种桥路补偿法原理图。霍尔元件H的不等位电势用调节Rw的方法进行补偿。在霍尔输出电极上串入一个温度补偿电桥,电桥的四个臂均为等值锰铜电阻,其中一臂并联热敏电阻Rt。当温度改变时,由于Rt的灵敏变化,使补偿电桥的输出电压相应改变。只要仔细调整补偿电桥的温度系数,可以达到在±40℃温度范围内,由C、D所得的霍尔电势与温度基本无关。
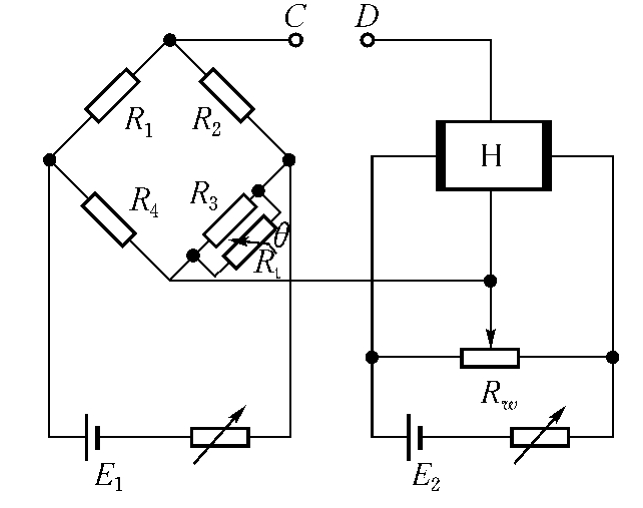
图5-13 一种温度补偿原理图
5.5.4 霍尔传感器应用
霍尔传感器是以霍尔元件为核心构成的一种磁感传感器,它是基于UH=(RH/d)IB式工作的,所以一切非电量只要能通过前置敏感元件(如弹性元件)变换成位移量,即可利用霍尔传感器进行测量。加之霍尔元件结构简单、工艺成熟、体积小、工作可靠、寿命长、线性好、频带宽,因而得到广泛应用。如用于测量大电流、微气隙磁场、微位移、转速、加速度、振动、压力、流量和液位等;用以制成磁读头、磁罗盘、无刷电机、接近开关和计算元件等等。
1.微位移及机械振动测量
当霍尔元件的控制电流不变,并置于均匀梯度的磁场中移动时,其输出的霍尔电势UH,只取决于它在磁场中的位移z。而且,磁场梯度越大,灵敏度越高;磁场梯度变化越均匀,霍尔电势与位移的关系越接近于线性。图5-14示出了几种产生梯度磁场的磁路系统。对应此3种磁路系统及z处磁感应强度B,可得相应的霍尔位移传感器的电势UH与位移Δz的关系曲线a、b、c,如图5-15所示。

图5-14 产生梯度磁场的几种磁系统
由图可知,曲线a的传感器线性范围窄,且存在零位输出。对曲线b,当位移Δz<±2mm时,输出霍尔电势UH与位移Δz之间具有良好的线性关系。这种形式的位移传感器,在其工作范围内的磁场梯度一般不大于0.03T/mm。两磁铁间的距离越小,磁场梯度越大,其灵敏度越高。这种传感器的分辨力可达10-6m。

图5-15 几种霍尔位移传感器的静态特性
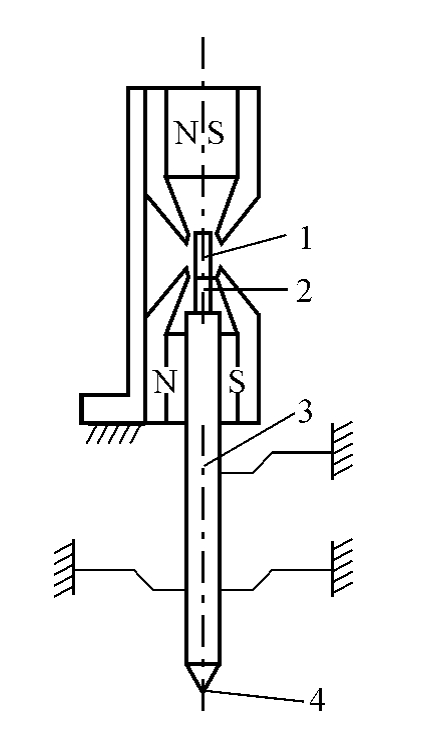
图5-16 霍尔振动传感器结构原理图
曲线c对应的位移传感器灵敏度最高。它由两个直流磁系统共同形成了一个高梯度磁场(达1T/mm)。但它能测的位移量很小,一般为Δz≤±0.5mm。上述微位移测量可推广应用于机械振动测量。
图5-16是一个振动传感器的结构原理图。置于磁场系统中的霍尔元件1取材砷化铟,它被固定在非磁性材料制成的平板2上,并与顶杆3刚性固连,顶杆3下端触头4与被测对象接触,整个组件随被测体做机械振动,元件输出的霍尔电势就反映出被测振动的频率和幅值。
2.无触点发讯及转速测量
当霍尔元件通以恒定的控制电流,且有磁体近距离接近然后再离开时,元件将输出一个脉冲霍尔电压;利用这一特性可进行无触点发讯。这种应用,只要有足够大的输出即可,而对霍尔元件本身的性能要求不高。此外,作用于霍尔元件的磁感应强度变化仅与磁体的相对位置有关,而与相对运动速度无关,这就使发讯装置的结构既简单又可靠。
霍尔无触点发讯可广泛用于精确定位、导磁产品计数、转速测量、接近开关和其他周期性信号的发讯。
图5-17为霍尔转速传感器的结构原理图。在图5-17(a)中把一个非磁性圆盘1固定在被测轴上,圆盘周边等间隔嵌有若干极性相反永磁铁氧体2,由导磁体3和置于两导磁体缝隙中的霍尔元件4组成测量头5。测量头两导磁体外端的间距与圆盘上两相邻铁氧体之间的距离相等。圆盘转动时,霍尔元件输出正负交变的周期电压。
图5-17(b)为另一种转速测量结构。在被测转速的轴上装一齿盘导磁体,对着齿盘固定有马蹄形永久磁铁,霍尔元件粘贴在磁铁磁极端面上。当导磁齿盘随被测轴旋转时,霍尔元件磁路中的磁阻和磁感应强度均发生周期性变化,其变化周期是被测轴转速的函数,因此,霍尔元件输出一系列频率与转速成比例的单向电脉冲。
上述两种霍尔转速传感器的测速范围很宽,为1~104r/s。

图5-17 霍尔转速传感器结构原理图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。










