



3.1.1 几种常用的重力仪
1.石英弹簧重力仪
该种仪器弹性系统为熔融后的石英制成的重力仪,是使用广泛的重力仪之一,种类多,但工作原理相同。仪器内部主弹簧一端焊接在作为温度补偿用的石英杆上,另一端与拉杆连接。主弹簧的弹力矩与摆杆及重荷的重力矩相平衡。其工作原理:当重力发生变化引起摆杆偏离水平位置时,指示丝随之偏转,通过一套光学系统即可发现指示丝形成的“亮线”在刻度片上偏离零线的位置。这时调节测量弹簧的长度,就可以使温度补偿杆绕测量扭丝作微小偏转,从而改变了主弹簧的弹力矩,使摆杆又回到零点位置。弹簧长度的变化,可以通过连接在它上端的螺旋测微读数器显示出来,这种读数方法称为零点读数法。两次零点读数的差值,就表明了重力的变化量。石英弹簧重力仪的观测精度已达到±0.1重力单位,如美国渥尔登重力仪。
ZSM型石英弹簧重力仪:该仪器是北京地质仪器厂设计并制造的,观测精度约为±0.3~±0.5g.u.,读数能力为0.1格,直接测量范围约为1400g.u.,测程范围50000 g.u.。接近国外同类仪器水平。仪器可分为如下几个主要部分:
石英弹簧重力仪结构:实际使用的石英弹簧重力仪,种类虽多,但结构大同小异。以ZSM型为例,主要组成部分包括:
(1)灵敏系统,又称平衡系统或弹性系统。它是感觉重力变化的部分,位于主体结构的底部,其结构如图3-1所示。主要部件中,除了温度补偿丝和负荷为金属外,其他均由石英制成。主要部件由一个矩形石英框架支撑着,用一个支杆固定在密封器顶盖上。灵敏系统的位移方式属角位移。
(2)光学系统,又称指示系统。它是一个长焦距显微镜,其功能是使石英摆杆的指示丝在刻度上成像。
在视域中的刻度片上可见到的“亮线”就是平衡体端的指示丝在显微镜下的像,通过对亮线的观察就知道平衡体偏转的情况,当重力增大时,平衡体向下偏转一个角度,我们就可以从视域中看到亮线向右边产生一个位移,反之,当重力减小时,亮线将向左边移动。
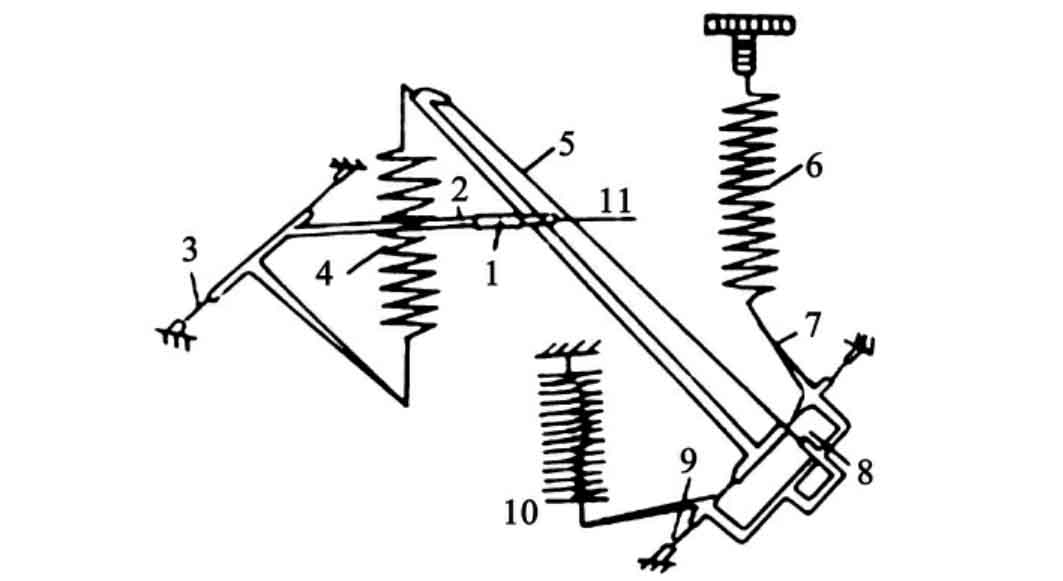
1—负荷;2—摆杆;3—摆扭丝;4—主弹簧;5—温度补偿框扭丝;6—读数弹簧;
7—读数弹簧连杆;8—温度补偿框扭丝;9—读数框架扭丝;10—测程调节弹簧;11—指示丝
图3-1 ZSM型重力仪灵敏系统结构图
刻度片中间的长线叫“零线”用来指示零点位置用,重力仪采用零点读数法,所以每次观测时,必须使亮线与零线重合。
(3)测量系统:它由测读装置、测程调节装置及纵、横水准器等组成。其中读数装置如图3-2所示,测微螺丝1通过连杆2与仪器板面上的读数器3相连,转动测微器旋钮可以带动测微螺丝旋转,测微螺丝的底部压一钢球4,其下面为导向装置5,该装置下面又连着读数弹簧6,随着测微螺丝的旋转,导向装置可以带动读数弹簧伸缩,借以改变灵敏系统中的弹力矩,把石英摆到水平零点的位置,此时读数器上显示的数字即为仪器读数。
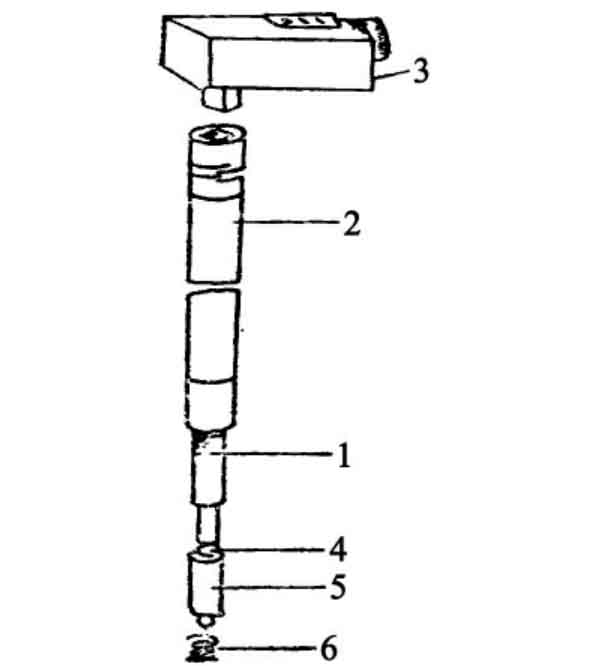
图3-2 ZSM型重力仪读数装置图
为保证仪器安放正确,仪器中间(或顶部)都装有两个互相垂直的水准器,其中之一与石英摆平行,称为纵水泡;另一个与摆扭丝轴平行,称为横水泡。
此种仪器灵敏、精度高、测程大、体积小、重量轻,计算简单,使用方便。用于寻找油汽田、煤田和金属矿床的重力勘探,以及大地重力测量等。整个仪器主体置于保温瓶内,最外面是金属壳,这种仪器体积小,运输方便,但比较娇贵,不宜强烈振荡,倾斜角度不宜大于45°,精度相对较低。
2.CG-3型全自动高精度重力仪
该仪器由加拿大生产,精度可达0.1g.u.,测程范围70000g.u.,它以处理机为基础,用于详查大比例尺勘查或大地测量。
其主要特点是自动化程度高,仅按一个键就可在一分钟内获得精确读数,在固定场前,把重力仪置于循环方式还可以获得一系列重力测量读数,而每个读数都是连续几秒钟采样的平均值,它以毫伽为单位显示在液晶显示器上,并且数据可以储存,也可以送入打印机,记录仪或微机中。
本仪器有较好的稳定性,仪器可在-40℃至45℃环境下工作,其心脏也由石英制成,所以读数不受磁场变化的影响。但仪器体积稍大,较笨重,不利于携带。
3.拉科斯特-隆贝格(LCR)-G型相对重力仪
拉科斯特-隆贝格重力仪,简称拉科斯特重力仪或LCR重力仪,是美国拉科斯特公司生产的助动型金属弹簧相对重力仪。目前LCR重力仪主要有三种型号:G型(即大地型)、D型(潮汐型)、ET型(即电子-动力型)。其中G型仪器多用于全球性的相对重力测量,其量程约为7Gal,精度是5μGal,超过了地球上的最大重力差(约5Gal)。
LCR重力仪的传感器是以“零长弹簧”思想为基础而设计的倾斜零长金属弹簧传感器。所谓“零长弹簧”就是一种长周期且具高灵敏度的弹簧,当所受外力为零时,它的有效长度也为零。
LCR重力仪的力学原理(图3-3)是:实现测量系统中的三个受力均达到平衡状态,三个力分别是主弹簧N,扭丝f和摆右端的重物处施加的力(mg)。系统要在三力作用下三个作用力的力矩达到平衡,实际可测量读取的力只有N,而f和mg大小是固定的,每次测量时使扭丝处于水平面内就可以保证每次测量时扭丝处的力是相等的。通过测量上端点的变化量测定每两点处的N,然后求两点间的差,就可得到两点间的相对重力。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。











